Три группы электроприводов постоянного тока для м.р.с.
Тиристорные ЭП пост тока для станкостроения разделены на 3 группы:
1)регулир. ЭП мощн. от 1 до 200 кВт с 2-зонным регулированием скорости при UЯ=var, Ф=var, DЯ≤1 : 100 для приводов главного движения.
2) регулир. нереверсивн. ЭП при UЯ=var, Ф=сonst, P=0.1-2.0 кВт с DЯ≤1 : 30
P=0.1-10.0 кВт с DЯ≤1 : (100-200) для приводов подач.
3)широкорегулир. реверсивн. ЭП при UЯ=var, Ф=сonst
P=0.1-20.0 кВт с DЯ≤1 : 10000 для приводов подачи станков.
Технические требования к электроприводам главного движения м.р.с.
К ЭП главного движения предъявляются требования изменения угловой скорости в диапазоне 2,5: 1-4: 1 при постоянной мощности и в диапазоне 10:1 при постоянном моменте. Привод должен быть с большим числом электрических ступеней, что обеспечивает коэффициент плавности φ≤1,1. в станках с ЧПУ для приводов главного движения применяются тирристорные ЭП постоянного тока и двухступенчатая коробка скоростей. Разрешается использование АД с частотным управлением. Двигатели переменного тока в закрытом исполнении имеют значительно меньшие габариты по сравнению с ДПТ, однако, преобразователи переменного тока по габаритам в 2-3 раза больше преобразователей постоянного тока и дороже их.
Технические требования к электроприводам подач м.р.с.
Электроприводы подач станков с ЧПУ должны обладать широким диапазоном изменения скоростей, который достигает 10 000:1 и более. Время пуска и торможения с приведенным моментом инерции механизма равным моменту инерции двигателя не должно превышать 0,1 с. Привод должен обеспечить позиционирование с точностью до 1-го микрона не более чем за 1 с. Жесткие требования выдвигаются также к равномерности перемещений на пониженных скоростях. Двигатели ЭП подач должны иметь большую кратность максимального момента и относительно малые габариты, что позволяет устанавливать их непосредственно на шариковых и роликовых винтах механизмов подач без высокоточных редукторов.
|
|
|
Допустимые погрешности скорости для электропривода постоянного тока станков с ЧПУ.
ЭП постоянного тока для станков с ЧПУ при работе не должны превышать допустимых погрешностей скорости. Суммарная погрешность скорости ΔΣ равна сумме погрешностей Δн при изменении нагрузки от 0,15Мн до Мн ,Δи при изменении напряжения от 0,9Uн до 1,1 Uн , Δт при изменении температуры ОС от 25 до 45◦ С и нагреве ЭП до становившейся температуры при моменте двигателя Мн
ΔΣ= Δи+ Δи+ Δт;  ;
;  ;
;  ;
;  ;
; 
При подсчёте ΔΣ подставляются максимальные значения ΔU1 или ΔU2 и Δн1 или Δн2. Нормируется коэффициент неравномерности: 
Погрешность угловой скорости при изменении направления вращения: 
|
|
|
 38. Комплектный электропривод типа ЭТУ3601.
38. Комплектный электропривод типа ЭТУ3601.
Комплектн. ЭП и тиристорн. преобразователи для металлореж. станков выпускаются мощностью 0,09-250 кВт при диапазоне регулир. скорости (100-20000):1.
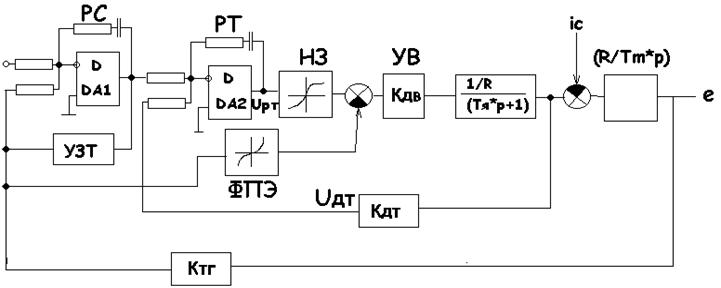
ЭП ЭТУ3601 предназнач. для работы с высокомоментными ЭД пост. тока в механизмах подач станков с ЧПУ. Трехфазн. мост. выпрямитель с к-том передачи Кув работает по принципу раздельного управления комплектами тиристоров. Схема управления выполнена в виде 2хконтурной сис-мы подчиненного регулирования с ПИ-регулят. тока и скорости. НЗ – нелинейн. звено - обеспечивает постоянство коэф-та усиления управл. вып-ля в РНТ и РПТ. Хар-ка НЗ обратна регулировочн. хар-кеуправл. вып-ля в РПТ. Сигнал на выходе регул. тока пропорционален только току двигателя, что достиг-ся подачей на НЗ функциональн. преобраз-ля ФПЭ сигнала положит. ОС по ЭДС ЭД, обеспеч. дополнит. токоограничение.
В сис-мерегулир-я предусмотрен так же узел зависимого токоограниченияУЗТ – огранич. выходн. значен. РС в зав-ти от напряженияТГ.
ЭП ЭТУ3601 разных исполнений обеспечивает диапазон рег-я скорости 1000:10000, выпр. ток 10-100 А, выпр. напряжен. 115-230 В. высокими технич. пок-ми облад. так же привод серии ЭПУ
|
|
|
 39. Комплектный электропривод типа ЭШИР-1 А.
39. Комплектный электропривод типа ЭШИР-1 А.
Импульсный ЭП пост. тока предназнач. для механизмов подач прецизионных станков с ЧПУ, роботов и автоматизир. установок, требующ. широкого изменения угловой скорости ЭД и высок. быстродействия.
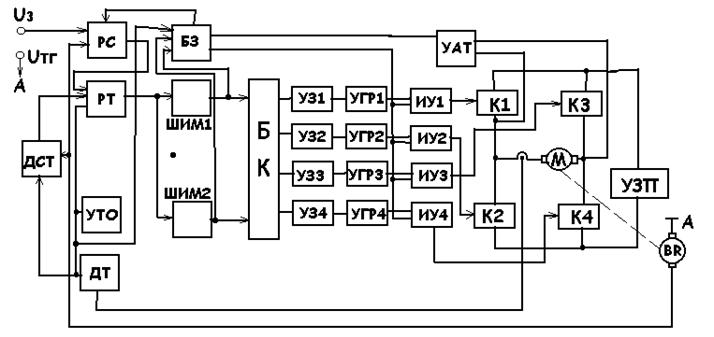
Схема комплектн. ЭП с транзисторн. широтно-импульсн. преобраз-лем типа ЭШИР-1А содержит: ПИ-регулятор тока РТ, П-регул. скорости РС, в ОС которых включены датчик тока ДТ и тахогенератор BR соотв.
На вход РТ поступают сигналы с датч. статич. тока ДСТ и сигнал от уст-ватокоограничения УТО при срабатывании последнего. С выхода РТ сигнал поступает на входы ШИМ1,2 осуществл. модуляцию входн. сигнала соответст. полярности. Блок коммутации БК реализует поочерёдный несимметричный закон коммутации, после чего широтномодулированный сигнал через узлы задержки УЗ1…УЗ4 и узлы гальв. развязки УГР1…4 поступает на импульсные усилители мощности ИУ1…4, управляющ. транзисторн. ключами К1…К4. Устройство защиты от перенапряжений УЗП отводит энергию, рекуперируем. в переходн. процессах в активное сопротивление и фильтр источника питания. При авариях: отключ. сети, обрыв в цепи BR, превышении током установл. значения на заданное время устройство аварийного торможения УАТ закорачивает якорь ЭД, останавливая его.
|
|
|
ЭП ЭШИР-1А обеспеч. диапазон регулир. скорости 1:10000 при max напряжении преобраз-ля до 140 В и max токах якоря: кратковременных – до 50 А, длительных – до 16 А. Работает с ЭД ДК1, ПСТ, 2П и др.
Для роботов и многооперац. станков выпуск. импульсн. многокоординатный привод серии ЭШИМ.
40. Комплектный электропривод типа "Размер 2М-5-2".
 Асинхронный ЭП – работа которого основана на принципе частотно-токового управления, позволяет получать глубокое регулир. углов. скорости при высоких динамич. показателях. При част.-токовом управлении в обмотки Эл. машины вводятся токи, мгновенные значения которых определяются требуем. значением э/м момента и угловым положением ротора. Для этого на вход привода подают 2 независимых входных сигнала, задающие токи в обмотках и обеспечивающ. не только регулир-е момента, но и возможность устанавливать требуемый поток намагничивания и реактивный ток преобраз-ля. Выполненный на этом принципе асинхр. глубокорегулир. комплектный ЭП “Размер 2М-5-2” предназначен для токарных станков с програмн. управлением.
Асинхронный ЭП – работа которого основана на принципе частотно-токового управления, позволяет получать глубокое регулир. углов. скорости при высоких динамич. показателях. При част.-токовом управлении в обмотки Эл. машины вводятся токи, мгновенные значения которых определяются требуем. значением э/м момента и угловым положением ротора. Для этого на вход привода подают 2 независимых входных сигнала, задающие токи в обмотках и обеспечивающ. не только регулир-е момента, но и возможность устанавливать требуемый поток намагничивания и реактивный ток преобраз-ля. Выполненный на этом принципе асинхр. глубокорегулир. комплектный ЭП “Размер 2М-5-2” предназначен для токарных станков с програмн. управлением.
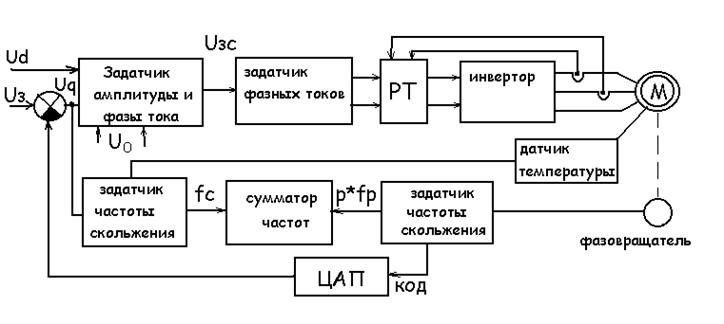
На вход преобраз-ля поступают сигнал Ud задания тока (потока) возбуждения и сигнал Uqрегулир-я момента, получаемые в рез-те сравнения напряжения задания скорости Uз с напряжением Uос, пропорц. действит. значению скорости. Задание амплитуды и фазы тока статора Uзс выполняется по выр-ю:

К1, К2 – к-ты пропорциональности
Пропорц. сигналу Uq частота скольжения fc суммируется с частотой вращения ротора fр и в виде импульсных сигналов с частотой  использ. для формирования сигналов задания фазовых токов Uза, Uзb с частотой
использ. для формирования сигналов задания фазовых токов Uза, Uзb с частотой  с учетом фазового сдвига 2пи/3. Здесь f0 – опорный сигнал частотой 2 кГц, р – число пар полюсов. Сигнал, пропорц. частоте вращения поля в статоре p*fр ЭД формируется с помощью датчика угла, выполненного в виде фазовращателя. Изменение фазы фазовращателя преобразуется в код частоты вращения, поступающий на ЦАП. Аналогов. сигнал Uос c выхода ЦАП реализует ОС по скорости. 3хфазн. РТ и транзисторный инвертор формируют в статоре двигателя токи, пропорц. сигналам Uза, Uзb и ток в фазе С, равный сумме токов фаз А и В. Выполнен на терморезисторах датчик температуры служит для формирования сигнала превышения допустимой температуры ЭД и сигнала, ограничивающего момент ЭД путем воздействия на задатчик частоты скольжения.
с учетом фазового сдвига 2пи/3. Здесь f0 – опорный сигнал частотой 2 кГц, р – число пар полюсов. Сигнал, пропорц. частоте вращения поля в статоре p*fр ЭД формируется с помощью датчика угла, выполненного в виде фазовращателя. Изменение фазы фазовращателя преобразуется в код частоты вращения, поступающий на ЦАП. Аналогов. сигнал Uос c выхода ЦАП реализует ОС по скорости. 3хфазн. РТ и транзисторный инвертор формируют в статоре двигателя токи, пропорц. сигналам Uза, Uзb и ток в фазе С, равный сумме токов фаз А и В. Выполнен на терморезисторах датчик температуры служит для формирования сигнала превышения допустимой температуры ЭД и сигнала, ограничивающего момент ЭД путем воздействия на задатчик частоты скольжения.
Дата добавления: 2018-08-06; просмотров: 636; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!