Расчет динамических характеристик механизма
Расчет приведенного момента инерции механизма
В этом разделе необходимо определить величину приведенного момента инерции механизма – обобщенной характеристики инерционности механизма.
Приведение масс и моментов инерции – это замена системы масс подвижных звеньев механизма приведенной массой, сосредоточенной в выбранной точке, или приведенным моментом инерции звена приведения. Приведение основано на эквивалентности мгновенных значений кинетической энергии звена приведения и всего механизма.
Величина угловой скорости начального звена периодически колеблется относительно некоторого постоянного среднего значения ω1 = const. Эти колебания вызваны тем, что во время работы механизма в течение одного оборота ведущего звена (кривошипа) силы, действующие на звенья механизма, постоянно изменяются (кроме сил тяжести). Это не может не оказать влияние на угловую скорость кривошипа.
Знание величины приведенного момента инерции механизма, позволит уравновесить механизм с помощью маховика. При этом можно обеспечить колебание угловой скорости кривошипа в соответствии с заданным коэффициентом неравномерности движения [δ].
Маховик – это вращающийся массивный сплошной диск или шкив, обладающий постоянным моментом инерции, кинетическая энергия которого, равна кинетической энергии всего механизма. Маховик предназначен для обеспечения заданного коэффициента неравномерности движения [δ].
|
|
|
Кинетическая энергия звена, совершающего поступательное вместе с центром масс плоскопараллельное движение (рис.4.1), равна:
 (4.1)
(4.1)
где mi – масса звена, кг; VS – скорость точки центра тяжести звена, м/с.
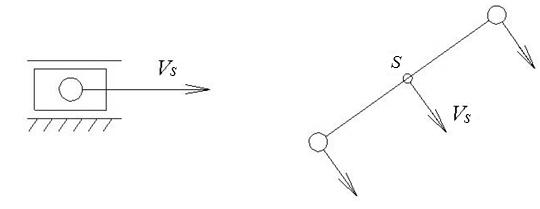
Рис. 4.1. Схема звена, совершающего поступательное плоскопараллельное движение: VS – скорость точки центра тяжести звена; S – центр тяжести звена
Во вращательном движении вокруг центра масс (рис.4.2):
 (4.2)
(4.2)
где ω – угловая скорость звена, 1/с; JS – момент инерции звена механизма, кгм2.
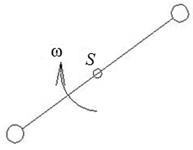
Рис. 4.2 Схема звена, вращающегося вокруг центра масс: ω – угловая скорость звена; S – центр масс
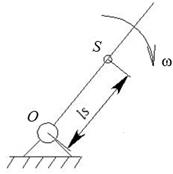
Рис. 4.3. Схема звена, вращающегося относительно оси вращения: ω – угловая скорость звена; lS – расстояние от центра вращения до центра масс S
Во вращательном движении относительно оси вращения в точке О (рис. 4.3) кинетическая энергия равна:
 (4.3)
(4.3)
где ωi – угловая скорость звена, 1/с; m – масса звена, кг; JS – момент инерции звена механизма, кгм2; JО – момент инерции звена относительно оси вращения О, кгм2; lS – расстояние от центра вращения до центра масс, м.
|
|
|
Величина m×ls2, чаще всего, весьма мала и ею, как правило, пренебрегают.
Если звено совершает сложное движение (рис.4.4), то его кинетическая энергия равна:
 (4.4)
(4.4)
где ωi –угловая скорость звена, 1/с; m – масса звена, кг; JS – момент инерции звена механизма, кгм2; VS – скорость точки центра тяжести звена, м/с.
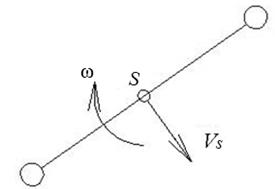
Рис. 4.4. Схема звена, совершающего поступательное и вращательное движение: VS – скорость точки центра масс звена; S – центр масс звена; ω – угловая скорость звена
Если механизм имеет одну степень подвижности (W = 1), то его кинетическая энергия может быть выражена через кинетическую энергию приведенной к точке массы, т.е. через mпр, или приведенный момент инерции звена приведения Jпр (рис. 4.5).
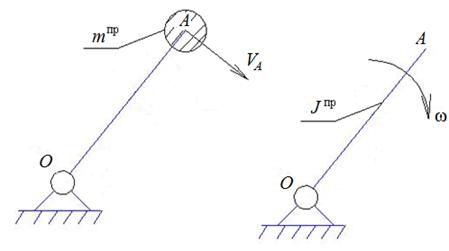
Рис. 4.5. Приведение масс и моментов инерции подвижных звеньев механизма к приведенной массе или к приведенному моменту: VА – скорость точки А; ω – угловая скорость звена; Jпр – приведенный момент инерции звена; mпр – приведенная масса звена в точке А
Для механизма с W = 1 кинетическая энергия приведенной массы к точке звена приведения равна:
Kпр = mпрVA2/2. (4.5)
А кинетическая энергия приведенного момента инерции к звену приведения соответственно равна:
|
|
|
Kпр = Jпрw12/2. (4.6)
Так как кинетическая энергия механизма эквивалентна в каждый момент времени кинетической энергии приведенной массы или приведенного момента инерции звена приведения, то можно записать: Kпр = K.
Общая кинетическая энергия механизма K, для любого его положения, равна сумме кинетических энергий всех подвижных звеньев, т.е.:
 (4.7)
(4.7)
где ωi – угловая скорость звена, 1/с; mi – масса звена, кг; JSi – момент инерции звена механизма, кгм2; VSi – скорость точки центра тяжести звена, м/с.
Если равны левые части уравнений (4.5), (4.6) и (4.7) соответственно, то равны и их правые части, а именно:
 ;
;
 (4.8)
(4.8)
Решая уравнения относительно mпр и Jпр, получим:
 (4.9)
(4.9)
 (4.10)
(4.10)
Приведенный момент инерции Jпр – это такой момент инерции звена приведения, кинетическая энергия которого равна сумме кинетических энергий всех подвижных звеньев механизма.
Пример 4.Выполнить силовой и динамический анализ исполнительного рычажного механизма качающегося инерционного конвейера (рис.2.2) для положения 5 по следующим исходным данным: частота вращения кривошипа n1 = 75 об/мин; размеры: lO1A = 0,2 м, lАВ = 0,6 м, lO2B = 0,5 м, lВC = 1,3 м, X0 = 0,45 м, Y0 = 0,1 м; массы звеньев m1 = 0,3 кг, m2 = 0,7 кг, m3 = 0,5 кг, m4 = 0,4 кг, m5 = 0,4 кг; силы сопротивления движению ползуна при прямом ходе Fс = 3000 H.
|
|
|
Решение:
1). Приведённый момент сил определяем по формуле (3.5):

2). Требуемая мощность электродвигателя, КПД привода ηобщ = 0,8:

Выбираем электродвигатель с мощностью Рдв = 7,5 кВт, номинальная частота вращения nдв = 1455 об/мин.
4). Общее передаточное отношение для передаточного механизма (передаточное число редуктора):
u = nдв/nкр = 1455/75 = 19,4
5). Приведенный момент инерции звена приведения (кривошипа):
Приведенный момент инерции звена приведения вычисляется из условия, что кинетическая энергия этого звена равна сумме кинетических энергий всех подвижных звеньев механизма.
Кинетическая энергия приведенного момента инерции к звену приведения соответственно равна согласно формуле (4.6)
Кинетическая энергия всех подвижных звеньев механизма:
– для звена О1А: кинетическая энергия 
– для звена АВ: кинетическая энергия 
– для звена О2В: кинетическая энергия 
–для звена ВС: кинетическая энергия 
– для звена С: кинетическая энергия 
Момент инерции подвижного звена можно вычислить по формуле
JSi = mi·pi2,
где pi = 0,3li – радиус инерции звена, м; li – длина звена, м.
Таким образом, приведенный момент инерции звена приведения определяем по формуле
Дата добавления: 2018-05-13; просмотров: 411; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!