Графоаналитический метод кинематического исследования плоского рычажного механизма
Целью курсового проектирования является проведение структурного, кинематического и динамического анализа плоского рычажного механизма, а также проектирование привода, который приводит исполнительный механизм в движение.
Основой структуры плоских механизмов являются плоские кинематические цепи. Кинематическую цепь можно преобразовать в механизм, если хотя бы одно из звеньев присоединить к неподвижному звену (стойке) и указать в ней входное звено или входную кинематическую пару. Основой структуры плоских рычажных механизмов являются плоские кинематические цепи, в которых звенья соединены посредством одноподвижных вращательных или поступательных пар (рис.2.1), оси которых лежат в плоскостях, соответственно перпендикулярных (для вращательных пар – В) и параллельных (для поступательных пар – П) плоскости движения кинематической цепи.
а)  б)
б) 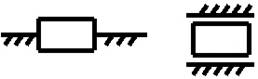
Рис. 2.1. Виды кинематических пар:
а) вращательная пара – В; б) поступательная пара – П
При построении таких механизмов используется принцип Л.В.Ассура, в соответствие с которым к начальному механизму (НМ), содержащему стойку и входные звенья (или одно входное звено), присоединяется ведомая кинематическая цепь (ВКЦ), содержащая все другие звенья механизма. При этом предполагается, что кинематические пары (или одна кинематическая пара), посредством которых ведомая цепь присоединяется к начальному механизму, отнесены к ведомой цепи:
|
|
|
 (2.1)
(2.1)
В общем случае, для плоских механизмов (в двумерном пространстве), число степеней свободы W плоского механизма определяется по универсальной структурной формуле П.JI. Чебышёва вида:
W = 3п – 2рН – рВ, (2.2)
где п – общее число подвижных звеньев механизма; рН –число низших кинематических пар (одноподвижных); рВ – число высших кинематических пар (двухподвижных).
По определению для начального механизма можно записать:
 (2.3)
(2.3)
Начальный механизм имеет столько же степеней свободы Whm, сколько и рычажный механизм, в составе которого он находится.
Обязательно должно выполняться условие:
WНМ = 3п – 2рН = W. (2.4)
Отсюда следует, что ведомая кинематическая цепь рычажного механизма обладает нулевой подвижностью W0 = 0 относительно тех звеньев (или одного звена, если W = 1) начального механизма, к которым она присоединяется. На практике это означает, что если ведомую цепь отсоединить от начального механизма и посредством тех же кинематических пар (или одной пары в случае W = 1) присоединить к стойке, то образуется статически определимая ферма.
Структурный анализ плоского рычажного механизма
|
|
|
Структурный анализ рычажного механизма состоит в исследовании его структурной схемы. Структурная схема – это схема механизма, отражающая принципиальное строение механизма и характер связей между его элементами без учета их геометрических размеров; она выполняется с учетом определенных условных обозначений и используется на этапе структурного анализа или синтеза механизма. Как правило, структурный анализ выполняется в следующей последовательности:
1) установить, каким является механизм – плоским или пространственным;
2) найти число n подвижных звеньев механизма;
3) установить число р кинематических пар, а также класс и вид каждой пары;
4) определить число W степеней свободы (подвижность) механизма;
5) указать входную пару (пары) и входное звено (звенья);
6) выделить начальный механизм и ведомую кинематическую цепь;
7) разделить ведомую цепь и группы Ассура, указать последовательность присоединения групп, начиная с группы (групп), присоединенных к начальному механизму, и определить W степень подвижности всех присоединённых групп.
Пример 1.
Выполнить структурный анализ исполнительного механизма привода качающегося инерционного конвейера (рис. 2.2).
|
|
|
Решение.
Структурной особенностью данного механизма является наличие в его составе двукратного шарнира В. На структурной схеме желоб с грузом, жестко связанный с ползуном 5, не указывается.
1. Изображаем структурную схему заданного механизма;
2. Мысленно приводя в движение звено 1, убеждаемся, что при этом все точки всех подвижных звеньев механизма двигаются только во взаимно параллельных плоскостях. Следовательно, этот механизм – плоский;
3. По результатам моделирования движения механизма охарактеризуем все звенья механизма и все кинематические пары.
Исследуемый механизм имеет: число подвижных звеньев механизма n = 5; число низших кинематических пар рН = 7, (табл.2.1, 2.2). Высших кинематических пар рВ = 0 (в данном механизме их нет).
Следовательно, степень подвижности механизма по формуле (2.2)

Это означает, что в рассматриваемом механизме достаточно задать закон движения только одному звену (в данном задании это звено 1, которое является ведущим), чтобы закон движения всех остальных звеньев был вполне определенным.
4. Из структурной схемы механизма выделяем начальный механизм – кривошип 1 со стойкой 0 (рис. 2.3) и ведомую кинематическую цепь (рис. 2.4), содержащую все остальные звенья механизма. Необходимо определить степень подвижности начального механизма и ведомой кинематической цепи по формуле (2.2).
|
|
|
5. Анализ ведомой кинематической цепи показывает, что она состоит из двух двухзвенных структурных групп, которые соединены между собой с помощью двукратного шарнира В. Группа 2-3 (ВВВ) и группа 4-5 (ВВП) (рис. 2.5). Необходимо определить степень подвижности этих двухзвенных структурных групп по формуле (2.2).
Основное содержание решения представлено на рис.2.2.
Таблица 2.1
Дата добавления: 2018-05-13; просмотров: 632; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!