Пример определения траектории движения точек механизма
Пример 2. Построить траектории движения заданных точек исполнительного рычажного механизма качающегося инерционного конвейера (рис.2.2) по следующим исходным данным: частота вращения кривошипа n1 = 75 об/мин; размеры: lO1A = 0,2 м, lАВ = 0,6 м, lO2B = 0,5 м, lВC = 1,3 м, X0 = 0,45 м, Y0 = 0,1 м; центры масс звеньев 2, 3 и 4 размещены посредине их длин, 1 – на оси кривошипа; положение звеньев для силового расчета механизма при φ1 = 150°.
Графическое построение траекторий движения точек звеньев осуществляется методом засечек. Суть этого метода рассмотрим на примере механизма по рис.2.2. Здесь ведущее звено – кривошип ОА; угловая скорость – постоянная.
Построение траекторий движения заданных точек начинается с вычерчивания в выбранном масштабе схемы механизма для заданного положения. Пример построения траекторий движения заданных точек механизма представлен на рисунке 2.6.
Методика построения планов механизма (рис.2.6):
1. В выбранном масштабе радиусом, равным величине кривошипа О1А, из точки О1 начертить окружность.
2. Полученная окружность является траекторией пальца кривошипа с точкой А. Методом засечек эту окружность разделить на 12 (6) равных частей и произвести предварительную нумерацию точек деления в направлении вращения кривошипа.
3. Найти координаты точки О2 и положения линии действия точки С ползуна.
4. Звено О2В совершает вращательное движение. Поэтому точки звена будут двигаться по дуге. Растворами циркуля О2В провести эту дугу.
|
|
|
5. Раствором циркуля размером звена АВ в масштабе из точки А0 на дуге траектории точки В сделать засечку. Это точка В0.
6. Соединить точки А0 и В0 прямой линией. Получили положение звена АВ.
7. Раствором циркуля размером звена ВС, в масштабе, из точки В0 сделать засечку на пересечении с линией действия точки С ползуна. Это точка С0.
8. Из точки В0 провести прямую до пересечения с траекторией точки С. Получили точку С0.
Отсчет номеров положения точки А ведется по возрастающей по направлению вращения кривошипа. Начало отсчета точки А0 должно соответствовать положению механизма, при котором выходное звено С начинает движение рабочего хода, находясь в крайнем ближнем положении, то есть в таком положении, из которого выходное звено С может двигаться только в одном направлении.
Далее методом засечек, аналогично, получают точки В1, В2, В3…. и С1, С2, С3….Соединяем между собой точки А и О1, А и В, В и О2, В и С в соответствии с номером положения.
Для определения траектории движения центров масс звеньев АВ, ВО2 и ВС необходимо указать их на соответствующем звене в каждом положении механизма, а затем, соединить точки последовательно. Получим плавную кривую траектории движения центров масс этих звеньев. По траектории движения видно, звенья АВ и ВС совершают плоскопараллельное движение, которое состоит из поступательного движения и вращательного движения вокруг некоторого полюса. Звенья АО1 и ВО2 совершают вращательное движение вокруг неподвижной оси.
|
|
|
При графическом изображении рассмотренных построений рекомендуется схему механизма для заданного положения и траектории движения наносить жирными линиями, а промежуточные положения – тонкими, можно использовать линии разного цвета.
Пример построения плана скоростей
Пример 3. Построить план скоростей исполнительного рычажного механизма качающегося инерционного конвейера (рис.2.2) по следующим исходным данным: частота вращения кривошипа n1 = 75 об/мин; размеры: lO1A = 0,2 м, lАВ = 0,6 м, lO2B = 0,5 м, lВC = 1,3 м, X0 = 0,45 м, Y0 = 0,1 м; центры масс звеньев 2, 3 и 4 размещены посредине их длин, центр массы звена 1 – на оси кривошипа; положение звеньев для силового расчета механизма при φ1 = 150°.
Решение (рис.2.7)
Укажем на некоторые особенности в решении рассматриваемой задачи, которые могут вызвать затруднения при ее разборе.
Крайние положения 0 и 7' звеньев механизма определяются по результатам построения траектории точек механизма (рис.2.2). При составлении и использовании векторных уравнений для построения планов скоростей необходимо учесть, что ползун 5 совершает поступательное прямолинейное движение, кривошип 1 и коромысло 3 – вращательное движение вокруг неподвижных осей О1 и О2 соответственно, шатуны 2 и 4 – плоское (плоскопараллельное) движение (см. пример 1 для структурного анализа механизма).
|
|
|
Построение следует начинать с ведущего звена АО1, точка О1 которого является неподвижной.
1. Абсолютная скорость точки А – это скорость вращения вокруг точки О1:
 (2.11)
(2.11)
2. Угловая скорость кривошипа при частоте вращения кривошипа:
n1 = 75 об/мин, равна:

3. Модуль скорости точки А:

Скорость точки О1: VО1 = 0.
4. Масштабный коэффициент для планов скоростей по формуле (2.7):
Направление скорости кривошипа АО1 определяется по направлению угловой скорости ω1 и строится перпендикулярно звену АО1.
Выбрав полюс плана скоростей – pυ (рис.2.7) и в выбранном масштабе отложить отрезок pυа.
Для определения абсолютной скорости точки В (рис.2.7) рассмотрим движение звена АВ как поступательное (переносное) вместе с точкой А, взятой за полюс, и вращательное (относительное) – вокруг точки А.
|
|
|
5. Абсолютная скорость  равна геометрической сумме переносной и относительной скоростей. Следовательно:
равна геометрической сумме переносной и относительной скоростей. Следовательно:
 (2.12)
(2.12)
где  – абсолютная скорость точки А;
– абсолютная скорость точки А;  – скорость вращения точки В относительно А.
– скорость вращения точки В относительно А.
В векторном уравнении (2.12) известны: вектор скорости и линии действия векторов  и
и  . Для графического решения этого векторного уравнения, из точки А плана скоростей проводим линию действия вектора перпендикулярно звену АВ, а из полюса pυ – линию действия перпендикулярно звену О2В. В результате на пересечении этих линий получим точку b. Вектор
. Для графического решения этого векторного уравнения, из точки А плана скоростей проводим линию действия вектора перпендикулярно звену АВ, а из полюса pυ – линию действия перпендикулярно звену О2В. В результате на пересечении этих линий получим точку b. Вектор  = представляет собой в масштабе μυ абсолютную скорость точки В.
= представляет собой в масштабе μυ абсолютную скорость точки В.
Строим план скоростей механизма для положения 5 (φ = 150°). В этом положении модуль скорости точки В можно вычислить по формуле (2.8), длина вектора = 60 мм (см. рис.2.7):

Абсолютную скорость  можно вычислить, также используя формулу (2.8) учитывая, что длина вектора
можно вычислить, также используя формулу (2.8) учитывая, что длина вектора  (рис.2.7):
(рис.2.7):

6. Положение точки центров масс S2, S3, S4 на плане скоростей строится на основе соотношений теоремы подобия для скоростей:



7. Для определения абсолютной скорости точки С составим векторное уравнение, которое равно геометрической сумме переносной скорости точки и относительной скорости  . Следовательно:
. Следовательно:
 (2.13)
(2.13)
В уравнении (2.13) известны: линия действия вектора скорости  параллельна оси х – х, а линия действия вектора скорости перпендикулярна звену ВС. При графическом решении этого векторного уравнения, из точки b плана скоростей проводим линию действия вектора перпендикулярно звену АВ, а из полюса pυ – линию действия параллельно оси х – х. В результате на пересечении этих линий получим точку С. Вектор
параллельна оси х – х, а линия действия вектора скорости перпендикулярна звену ВС. При графическом решении этого векторного уравнения, из точки b плана скоростей проводим линию действия вектора перпендикулярно звену АВ, а из полюса pυ – линию действия параллельно оси х – х. В результате на пересечении этих линий получим точку С. Вектор  представляет собой в масштабе μυ абсолютную скорость точки С.
представляет собой в масштабе μυ абсолютную скорость точки С.
Строим план скоростей механизма для положения 5 (φ = 150°). В этом положении абсолютную скорость точки С можно вычислить по формуле (2.8), учитывая, что длина вектора  = 50 мм (рис.2.7):
= 50 мм (рис.2.7):

Абсолютную скорость  можно вычислить, используя формулу (2.8), длина вектора
можно вычислить, используя формулу (2.8), длина вектора  (рис.2.7):
(рис.2.7):

Пример построения плана ускорений механизма
Пример 4. Построить план ускорений исполнительного рычажного механизма качающегося инерционного конвейера (рис.2.2) по следующим исходным данным: частота вращения кривошипа n1 = 75 об/мин; размеры: lO1A = 0,2 м, lАВ = 0,6 м, lO2B = 0,5 м, lВC = 1,3 м, X0 = 0,45 м, Y0 = 0,1 м; центры масс звеньев 2, 3 и 4 размещены посредине их длин, 1 – на оси кривошипа; положение звеньев механизма при угле поворота кривошипа φ1 = 150°.
Решение (рис.2.8).
При построении плана ускорений необходимо составить векторные уравнения для абсолютных ускорений характерных точек механизма, а затем они решаются графическим способом (положение 5 механизма на рис.2.6).
Построение следует начинать с ведущего звена АО1, точка О1 которого является неподвижной.
1. Абсолютное ускорение точки А – это ускорение вращения относительно точки О1:
 (2.14)
(2.14)
где  – ускорение точки О1, принятой за полюс,
– ускорение точки О1, принятой за полюс,  = 0;
= 0;  – касательное ускорение точки А при вращении её относительно О1;
– касательное ускорение точки А при вращении её относительно О1;  – нормальное ускорение точки А при вращении её относительно О1.
– нормальное ускорение точки А при вращении её относительно О1.
Величина нормального ускорения точки А:

Величина касательного ускорения точки А: 
2. Масштабный коэффициент для планов ускорений по формуле (2.9):
Выбрать полюс плана ускорения – pа (рис.2.8) и в выбранном масштабе отложить отрезок pаа.
3. Для определения абсолютного ускорения точки В рассмотрим движение звена АВ.
С одной стороны, абсолютное ускорение  равно геометрической сумме переносного ускорения, равного ускорению полюса А и ускорения точки В при вращении относительно полюса А. С другой стороны, абсолютное ускорение равно геометрической сумме переносного ускорения, равного ускорению полюса О2 и ускорения точки В при вращении относительно полюса О2. Следовательно, необходимо решить систему уравнений:
равно геометрической сумме переносного ускорения, равного ускорению полюса А и ускорения точки В при вращении относительно полюса А. С другой стороны, абсолютное ускорение равно геометрической сумме переносного ускорения, равного ускорению полюса О2 и ускорения точки В при вращении относительно полюса О2. Следовательно, необходимо решить систему уравнений:

 (2.15)
(2.15)
где  – переносное ускорение точки А;
– переносное ускорение точки А;  – ускорение точки О2, принятой за полюс,
– ускорение точки О2, принятой за полюс, 
 – касательное ускорение точки В при вращении её относительно А;
– касательное ускорение точки В при вращении её относительно А;  – нормальное ускорение точки В при вращении её относительно А;
– нормальное ускорение точки В при вращении её относительно А;  – касательное ускорение точки В при вращении её относительно О2;
– касательное ускорение точки В при вращении её относительно О2;  – нормальное ускорение точки А при вращении её относительно О2.
– нормальное ускорение точки А при вращении её относительно О2.
Модуль нормального ускорения точки В, при вращении её относительно А можно вычислить, используя результаты построения плана скоростей:
Модуль нормального ускорения точки В, при вращении её относительно О2 также можно вычислить, используя результаты построения плана скоростей:

В векторном уравнении (2.15) известны: линии действия векторов касательного ускорения  и касательного ускорения
и касательного ускорения  , но их величины по модулю – неизвестны.
, но их величины по модулю – неизвестны.
На плане ускорений вектор изобразится отрезком  , а вектор
, а вектор  изобразится отрезком
изобразится отрезком  .Величину отрезков можно вычислить, используя формулу (2.10):
.Величину отрезков можно вычислить, используя формулу (2.10):
Для графического решения этого векторного уравнения, из точки a плана ускорений проводим отрезок по линии действия вектора параллельно звену АВ и по модулю равный . Вектор ускорения – мал по величине и на чертеже свелся в точку.
Затем проводим линию перпендикулярно линии действия вектора  . Далее, из полюса pа – проводим линию действия
. Далее, из полюса pа – проводим линию действия  параллельно звену ВО2 и по модулю равный
параллельно звену ВО2 и по модулю равный  , а затем линию перпендикулярно линии действия вектора . В результате на пересечении этих линий получим точку b. Вектор pаb = аВ представляет собой в масштабе μа абсолютное ускорение точки В.
, а затем линию перпендикулярно линии действия вектора . В результате на пересечении этих линий получим точку b. Вектор pаb = аВ представляет собой в масштабе μа абсолютное ускорение точки В.
4. Для определения абсолютного ускорения  точки С, совершающей поступательное движение параллельно оси х – х, необходимо составить векторное уравнение.
точки С, совершающей поступательное движение параллельно оси х – х, необходимо составить векторное уравнение.
Линия действия абсолютного ускорения равна геометрической сумме переносного ускорения, равного ускорению  полюса В и ускорения
полюса В и ускорения  точки С при вращении относительно полюса В:
точки С при вращении относительно полюса В:
 (2.16)
(2.16)
где – переносное ускорение точки В;  – касательное ускорение точки С при вращении её относительно В;
– касательное ускорение точки С при вращении её относительно В;  – нормальное ускорение точки С при вращении её относительно В.
– нормальное ускорение точки С при вращении её относительно В.
Модуль нормального ускорения точки С, при вращении её относительно В можно вычислить, используя результаты построения плана скоростей:

Модуль изобразится на плане ускорений отрезком  . Величина отрезка мала по величине и на чертеже свелась в точку. В векторном уравнении (2.16) известна линия действия вектора касательного ускорения
. Величина отрезка мала по величине и на чертеже свелась в точку. В векторном уравнении (2.16) известна линия действия вектора касательного ускорения  , но его величина по модулю – неизвестна.
, но его величина по модулю – неизвестна.
Для графического решения этого векторного уравнения, из точки b плана ускорений, проводим линию действия вектора  перпендикулярно звену СВ. Далее, из полюса pа – проводим линию действия параллельно х – х. В результате на пересечении этих линий получим точку с. Вектор pас представляет собой в масштабе μа абсолютное ускорение точки В.
перпендикулярно звену СВ. Далее, из полюса pа – проводим линию действия параллельно х – х. В результате на пересечении этих линий получим точку с. Вектор pас представляет собой в масштабе μа абсолютное ускорение точки В.
Модуль ускорения можно вычислить по формуле (2.10), длина вектора 

Векторы ускорений точек S2, S3, S4 находятся на плане ускорений в соответствии с теоремой подобия для ускорений и правилом обхода контуров по аналогии со скоростями этих точек.
Результаты кинематического анализа необходимы для исследования рабочего процесса механизма и для проектирования его узлов и деталей. Скорости и ускорения используются для расчета сил, мощностей, износостойкости и для определения истинного движения машины.
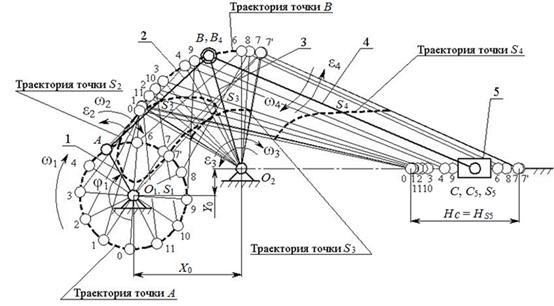
Рис. 2.6 План положений механизма μl = 0,01 м/мм
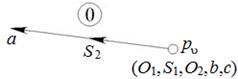
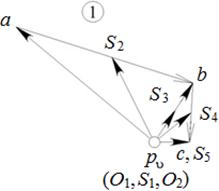

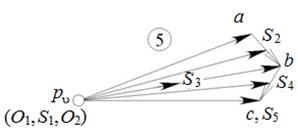
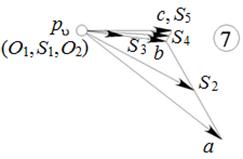
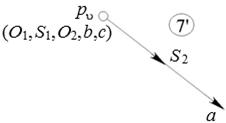
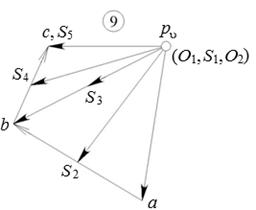
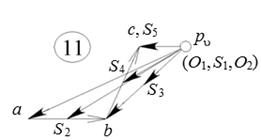
Рис. 2.7. Планы скоростей механизма, μυ = 0,035 (м·с-1)/мм
для положений механизма 0, 1, 3, 5, 7, 7´, 9, 11.

Рис. 2.8. План ускорений механизма, для положения 5 механизма (φ1 = 150°), μа = 0,24 (м·с-2)/мм для положения механизма в точке 5
Дата добавления: 2018-05-13; просмотров: 783; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!