Розрахункова схема віброактивного агрегату
Задачу будемо розглядати стосовно коливань механізму з незбалансованим ротором. Дослідження роботи кріпильних вузлів при циклічному навантаженні виконаємо на прикладі віброактивного роторного агрегату, розрахункова схема якого зображена на (рис. 2.29).
Механічна система, наприклад, електродвигун – відцентровий вентилятор, складається із корпусу 1 масою mS і ротора 2 масою mR , який швидко обертається. Корпус пружно закріплений на опорах А і В за допомогою кріпильних вузлів 3. В свою чергу кріпильний вузол 3 складається із деталей, що з’єднуються (лапи двигуна та основи) і різьбових деталей типу болт-гайка, пружна шайба.
Причиною виникнення коливань являється дисбаланс мас ротора і статора відносно осі обертання 0. Динамічні моменти інерції статора і ротора відносно центрів мас СS і СRпозначимо ISі IR. Статор і ротор будемо розглядати як абсолютно тверді тіла. Податливістю вала і його опор нехтуємо.
Математична модель взаємодії віброактивного агрегату з основою
Механічна система (рис.2.29) має чотири ступені вільності. Розглянемо поступальні і обертальні рухи мас статора mS і ротора mR в вибраній системі узагальнених координат x , y , gS і gR .
Узагальнені координати – це незалежні параметри, які визначають положення механізму відносно нерухомих осей.
Диференційні рівняння руху механічної системи в узагальнених координатах складемо на основі рівняння Лагранжа другого роду. Число рівнянь Лагранжа дорівнює числу ступенів вільності механізму:
|
|
|
| (2.51) |

де Т- кінетична енергія ;  ,
,  ,
,  ;
;  ,
,  ,
,  і
і  ,
,  ,
,  ,
,  - узагальнені сили, що відповідають потенціальній енергії, енергії розсіяння і зовнішніх сил.
- узагальнені сили, що відповідають потенціальній енергії, енергії розсіяння і зовнішніх сил.
Розрахункова схема віброактивного агрегату
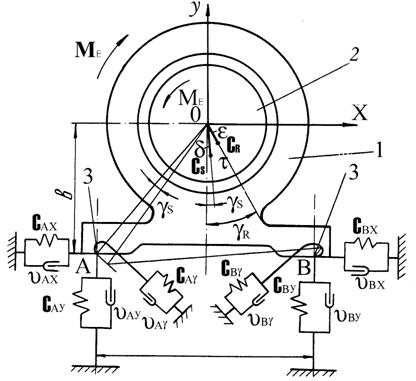 Рис.2.29
Рис.2.29
|
Для зручності розв’язку системи диференційних рвнянь (2.51) подамо її в матричному вигляді (математичні перетворення в [28])
 . .
| (2.52) |
де М- матриця; V, F, C, X, N – стовпці матриці
Зв’язок узагальнених координат з узагальненими швидкостями визначається матричним рівнянням :

| (2.53) |
Для асинхронного двигуна , при його роботі на робочій частині механічної характеристики, момент рушійних сил визначається за відомою, із курсу електроприводу, залежністю :
 , ,
| (2.54) |
де МК - критичний момент двигуна ;
 - синхронна кутова швидкість ;
- синхронна кутова швидкість ;
S K - критичне ковзання двигуна.
Позначимо :
 . .
|
З врахуванням прийнятих позначень рівняння (2.54) матиме вигляд :
 . .
| (2.55) |
Вирази (2.52), (2.53) та (5.55) являють собою повну систему нелінійних диференційних рівнянь першого порядку, записану безпосередньо в нормальній формі Коши. Розв’язуючи цю систему рівнянь, наприклад, методом Рунге – Кутта, можна визначити деформації і зусилля в кріпильних вузлах, а також віброшвидкості агрегату, що коливається.
|
|
|
Дата добавления: 2018-05-09; просмотров: 302; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!