Получение вход-выходных математических моделей УОУ
В дифференциальной форме.
Этот этап КР способствует закреплению знаний, необходимых для
грамотного преобразования одних форм описания динамических звеньев и
систем к другим. В частности, необходимо от нескольких (двух) передаточных функций объекта управления по каналам перейти к ДУ, описывающему его динамические свойства по обоим каналам.
Данная задача решается путём операторного описания связи выходной переменной объекта  с выходными воздействиями
с выходными воздействиями  ,
,  через
через
соответствующие передаточные функции:
 (2.4)
(2.4)
Дальнейшие преобразования состоят в том, что уравнение (2.4) приводиться к общему знаменателю и трансформируется к полиноминально- операторному виду. Из полученного операторного уравнения, на основании
использования известных свойств преобразования Лапласа [3-10], обратным преобразованием формируется дифференциальное уравнение общего
вида:
 (2.5)
(2.5)
Выводы по второму разделу.
Заключение второго раздела КР необходимо сформулировать основные выводы о свойствах объекта управления, оценки которых даны в
ходе работы на основании анализа ПФ, ДУ, рассчитанных и построенных
характеристик.
- МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ
ТРЕТЬЕГО РАЗДЕЛА.
Исходные данные и цель работы.
|
|
|
Третий раздел “Исследование возможностей и простейших вариантов управления объектом” курсовой работы выполняется на основе данных, полученных в первом и втором разделах и ставит целью закрепление теоретических знаний и развитие практических навыков в решении задач по следующим вопросам:
1) использование ЧХ для параметрического синтеза законов управления (ЗУ) и оценки его качества [3-15];
2) оценка возможностей регулирования УОУ с использованием статистических законов;
3) оценка возможностей регулирования УОУ с использованием астатических законов;
4) создание и исследование проектов систем автоматического управления с использованием пакета CLASSIC [1].
Предусматривая следующие этапы выполнения этого раздела КР:
а) создание проекта одноконтурной системы автоматического регулирования на базе УОУ;
б) исследование возможностей и качества пропорционального регулирования УОУ;
в) исследование необходимости и возможностей
г) пропорционально-дифференциального регулирования УОУ;
д) исследование возможностей и качества интегрального регулирования УОУ;
е) исследование необходимости и возможностей пропорционально-интегрального регулирования УОУ.
|
|
|
Оценка возможностей статического управления объектом.
Описание математических моделей, сущности, свойств и областей
применения типовых законов регулирования (ТЗР) в той или иной форме
даны в работах [3-15].
П-закон регулирования. Данный этап КР выполняется с использованием графиков АФЧХ -  ЛАЧХ -
ЛАЧХ -  и ЛФЧХ -
и ЛФЧХ -  УОУ по каналу управления, построенных во втором разделе в среде программного пакета CLASSIC.
УОУ по каналу управления, построенных во втором разделе в среде программного пакета CLASSIC.
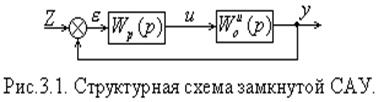
Сначала необходимо оценить устойчивость САУ, изображённой на
рис.3.1, когда используется П-закон регулирования:
 (3.1)
(3.1)
с  В этом случае АФЧХ
В этом случае АФЧХ  совпадает с АФЧХ разомкнутой
совпадает с АФЧХ разомкнутой
САР. Поэтому необходимо проанализировать этот график, построенный
ранее во втором разделе с использованием критерия Найквиста [3-10]. В
случае отрицательного решения вопроса об устойчивости рассмотренной
системы необходимо, анализируя графики ЛЧХ, исследовать принципиальную возможность получения устойчивой системы при использовании П-закона управления.
Если устойчивое управление с использование П-регулятора принципиально невозможно (т.н. структурная неустойчивость), то необходимо сделать об этом обоснованный вывод и переходить к следующему этапу раздела устойчивое управление возможно, необходимо выполнить все допустимые для данного варианта операции из перечисленных ниже:
|
|
|
1) оценить оптимальное значение  , соответствующее максимальному запасу устойчивости системы по фазе;
, соответствующее максимальному запасу устойчивости системы по фазе;
2) получить максимальное значение ,обеспечивающее необходимый запас устойчивости по модулю  , где
, где  - критическое минимально допустимое значение запаса, выбираемое проектировщиком в зависимости от порядка передаточной функции объекта и порядка его астатизма;
- критическое минимально допустимое значение запаса, выбираемое проектировщиком в зависимости от порядка передаточной функции объекта и порядка его астатизма;
3) получить максимальное значение , обеспечивающее необходимый запас устойчивости по фазе  , где
, где  - такое критическое минимально допустимое значение запаса, выбираемое проектировщиком исходя из тех же условий;
- такое критическое минимально допустимое значение запаса, выбираемое проектировщиком исходя из тех же условий;
4) найти оптимальное значение относительно интегрального квадратичного критерия качества (ИКК), подбор весовых коэффициентов критерия провести опытным путём, ориентируясь на вид переходного процесса.
Для поиска значения , отвечающего требованиям первых трёх пунктов необходимо сформулировать в среде пакета CLASSIC структуру разомкнутой САУ в соответствии с рис.3.2 и назначить звено  варьируемым. При реализации последнего пункта исследуется и оптимизируется с использованием соответствующей опции CLASSICа [1] проект, изображенный на рис 3.2.
варьируемым. При реализации последнего пункта исследуется и оптимизируется с использованием соответствующей опции CLASSICа [1] проект, изображенный на рис 3.2.
|
|
|

Для выбора значения , оптимального по запасу устойчивости,
необходимо выбрать то его значение из двух полученных, при котором одно-
временно удовлетворяются инженерные ограничения на запасы по модулю
и по фазе. Если же такого значения не существует, об этом делается со-
ответствующий вывод и дается его обоснование.
ПД-закон регулирования. Данный этап работы выполняется в том
случае, если результатом предыдущих этапов явился вывод о невозможности устойчивого или удовлетворительного по запасу устойчивости регулирования исследуемого УОУ с помощью П-регулятора.
В этом случае рассматривается возможность статического регулирования с использованием идеального ПД-закона, который в случае несвязанных настроек (см.[1.1]) описывается ПФ:
 (3.2а)
(3.2а)
а в случае связных – ПФ:
 (3.2)
(3.2)
Методика исследования, как и в случае П-закона управления, сводится к оценке значений настроек и  , обеспечивающих требуемые запасы
, обеспечивающих требуемые запасы
устойчивости или оптимум поИКК.
В проекте по рис.3.1 с ПД-регулятором полагают начальное значение
 а начальную величину
а начальную величину  определяют из следующего эмпирического соотношения:
определяют из следующего эмпирического соотношения:
 (3.3)
(3.3)
где  - значение частоты, при котором фазовая характеристика
- значение частоты, при котором фазовая характеристика
УОУ опускается ниже ординаты  на 10 угловых градусов (определяется по графику ЛФЧХ объекта, построенному во втором разделе).
на 10 угловых градусов (определяется по графику ЛФЧХ объекта, построенному во втором разделе).
Далее вместо ПФ пропорционального звена  (рис. 3.2) в проект вводиться ПФ с ПД-регулятора (3.2) и исследуются ЛАЧХ
(рис. 3.2) в проект вводиться ПФ с ПД-регулятора (3.2) и исследуются ЛАЧХ  и ЛФЧХ
и ЛФЧХ  разомкнутой системы (см. [3-10]). При этом ЛФЧХ разомкнутой системы с регулятором (3.2) должна иметь всплеск со значениями
разомкнутой системы (см. [3-10]). При этом ЛФЧХ разомкнутой системы с регулятором (3.2) должна иметь всплеск со значениями  , причём необходимо, чтобы значение локального максимума составляла не менее
, причём необходимо, чтобы значение локального максимума составляла не менее  . Если амплитуда всплеска недостаточна, подбирают значения
. Если амплитуда всплеска недостаточна, подбирают значения  таким образом, чтобы выполнялось следующее соотношение:
таким образом, чтобы выполнялось следующее соотношение:
 (3.4)
(3.4)
где  - максимум (или локальный экстремум) ЛФЧХ разомкнутой
- максимум (или локальный экстремум) ЛФЧХ разомкнутой
системы.
После получения , вид которой отвечает ограничению (3.4),
Находят оптимальное значение из соотношения:
 (3.5)
(3.5)
где  - значение частоты, соответствующее значению фазовой характеристики, удовлетворяющему равенству:
- значение частоты, соответствующее значению фазовой характеристики, удовлетворяющему равенству:

 (3.6)
(3.6)
Далее вводят в проект разомкнутой системы рассчитанное значение и определяют запас устойчивости по модулю:
 (3.7)
(3.7)
где  - частота пересечения с ординатой
- частота пересечения с ординатой  , и производят
, и производят
оценку полученной пары запасов устойчивости на соответствие исходным
ограничениям. При этом запас устойчивости по фазе определяется выражением:
 (3.8)
(3.8)
Оптимизация ПД-регулятора по ИКК производиться с использованием соответствующих опций системы CLASSIC, позволяющих оптимизацию САУ по двум варьируемым параметрам.
Результаты расчёта параметров настроек по различным критериям
необходимо сравнить и сделать соответствующими выводы.
Дата добавления: 2018-04-15; просмотров: 353; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!