Построение графика избыточных работ
Величину (Аизб)max легко определить, если заданы законы изменения моментов движущих сил МД и сил сопротивления МС. Работа для Аизб различных участков определяется площадями, заключенными между кривыми МД и МС, т.к.
где φ1 и φ2 – углы, соответствующие максимальному ωmax и минимальному ωmin – значениям угловой скорости звена приведения.
Приведенным моментом сил называется момент, условно приложенный к ведущему звену и развивающий мгновенную мощность в данном положении, равную сумме мгновенных мощностей всех сил и моментов, приложенных к звеньям механизма в том же положении машин.
Напишем уравнение для определения приведенного момента, пренебрегая силами трения:

где  – приведенный момент;
– приведенный момент;  – угловая скорость звена приведения;
– угловая скорость звена приведения;  – силы, действующие на звенья механизма;
– силы, действующие на звенья механизма;  – скорости точек приложения сил;
– скорости точек приложения сил;  – моменты, действующие на звенья механизма;
– моменты, действующие на звенья механизма;  – угловые скорости звеньев, к которым прилагаются моменты. Тогда
– угловые скорости звеньев, к которым прилагаются моменты. Тогда
 (5.1)
(5.1)
Вычислив по формуле (5.1) значения для 12 положений ведущего звена за один цикл движения машины, строим график зависимости  или
или  , где
, где  – приведенный момент сил сопротивления,
– приведенный момент сил сопротивления,  – приведенный момент движущих сил.
– приведенный момент движущих сил.
График работ сил сопротивления  получаем путем графического интегрирования зависимости ; график работ движущих сил
получаем путем графического интегрирования зависимости ; график работ движущих сил  – путем графического интегрирования зависимости
– путем графического интегрирования зависимости  .
.
Заметим, что в этом случае при интегрировании значений и за один цикл установившегося движения работа движущих сил равна работе сил сопротивления:
где φ – угол поворота ведущего звена, соответствующий одному циклу движения.
Графическое интегрирование выполним в следующем порядке:
1) проведем (см. рис. 5.1, а) вертикальные линии  , соответствующие серединам интервалов 0–1, 1–2, 2–3, …, а затем отложим на оси ординат отрезки Оа = у1, Оb = у2, Ос = у3 и т.д.;
, соответствующие серединам интервалов 0–1, 1–2, 2–3, …, а затем отложим на оси ординат отрезки Оа = у1, Оb = у2, Ос = у3 и т.д.;
2) на продолжении оси 0φ выберем точку р,причем отрезок Ор = Н назовем полюсным расстоянием;
3) точку p соединим прямыми с точками а, b, c и т.д.;
4) на рис. 5.1, б из точки 0 в интервале 0–1 проводим прямую Oa′ параллельно лучу pa, прямую a′b в интервале 1–2 параллельно лучу pb и т.д.;
5) точки a′, b′, c′… соединяем плавной кривой и получаем график зависимости работы сил сопротивления от угла поворота ведущего звена:
Масштаб работ находим по формуле
 ,
,
где  – масштаб моментов, H·м/мм;
– масштаб моментов, H·м/мм;  – масштаб угла поворота, рад/мм; Н – полюсное расстояние, мм.
– масштаб угла поворота, рад/мм; Н – полюсное расстояние, мм.
Так как принято, что МПД = const, то диаграмма этих моментов будет изображаться прямой, параллельной оси абсцисс.
После интегрирования такой диаграммы получим прямую линию, наклоненную к оси абсцисс под некоторым углом α. Поскольку за один цикл установившегося движения работы движущих сил и сил сопротивления равны, то наклон прямой определяется соединением начала (точка 0) и конца (точка к) цикла прямой линией. Это построение выполнено на рис. 5.1, б.
Для построения графика избыточных работ Aизб следует вычесть из ординат графика работ моментов движущих сил ординаты графика работ моментов сил сопротивления. Это построение дано на рис. 5.1, б.
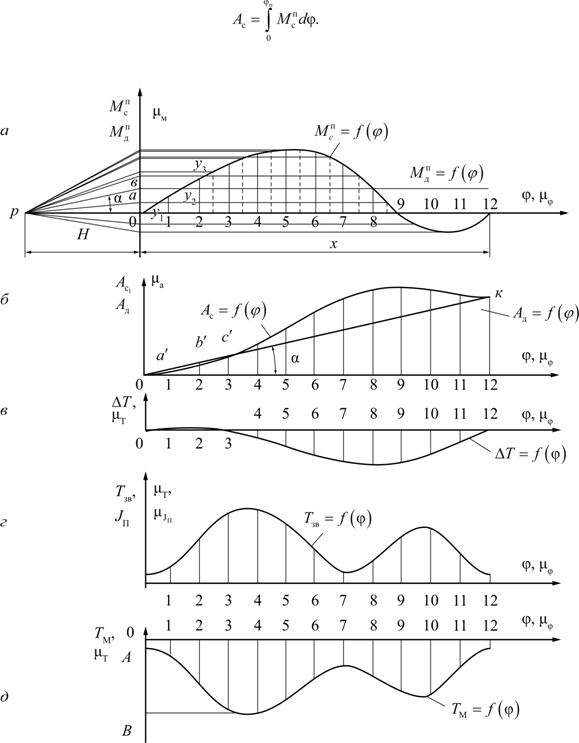
Рис. 5.1. Диаграммы к расчету маховика: а – график изменения приведённых моментов; б – график изменения работ сил полезного сопротивления
и движущих сил; в – график изменения приращения кинетической энергии
машины; г – график изменения кинетической энергии звеньев; д – график
изменения кинетической энергии маховика
Масштаб графика зависимости Аизб (∆Т) от оси φ равен масштабу графика работ, т.е.  (Дж/мм).
(Дж/мм).
Масштаб для поворота ведущего звена общий для всех графиков.
5.4. Построение графиков кинетической энергии звеньев
и приведенного момента инерции механизма
Приведенный к ведущему звену момент инерции звеньев:
где ТЗВ – кинетическая энергия звеньев механизма;  – угловая скорость звена приведения, ωП = ωСР;
– угловая скорость звена приведения, ωП = ωСР;  – масса i-го звена; – абсолютная скорость центра тяжести i-го звена; Jsi – момент инерции i-го звена относительно оси, проходящей через центр тяжести; ωi – угловая скорость i-го звена.
– масса i-го звена; – абсолютная скорость центра тяжести i-го звена; Jsi – момент инерции i-го звена относительно оси, проходящей через центр тяжести; ωi – угловая скорость i-го звена.
Кинетическая энергия механизма подсчитывается как сумма кинетических энергий его отдельных звеньев, а последние, в зависимости от характера движения звеньев, вычисляются по известным из механики формулам:
1) для поступательно движущихся звеньев:

2) для звеньев, вращающихся вокруг осей, проходящих через центр тяжести:
 ;
;
3) для звеньев, вращающихся вокруг осей, не проходящих через центр тяжести или совершающих произвольное плоское движение:
Взяв с планов скоростей длины соответствующих отрезков для данного положения механизма, подсчитываем значения кинетической энергии звеньев для 12 положений механизма и строим по ним график зависимости TЗВ = f (φ).
Приведенный к ведущему звену момент инерции звеньев может быть определен через кинетическую энергию звеньев:

Из соотношения (3.29) подсчитывается значение JП для 12 положений и строится график JП = f (φ). Вид графика для JП будет такой же, как и для TЗВ, только в другом масштабе. Построение графика JП = f (φ) аналогично построению графика TЗВ = f (φ).
5.5. Алгоритм расчета момента инерции маховика
по методу Н.И. Мерцалова
1. По формуле 5.1 для 12 положений машины определить приведенный момент сил сопротивления MCП и построить график зависимости MCП = f (φ) при выбранных масштабах μТ и μφ (см. рис. 5.1, а).
2. Путем графического интегрирования зависимости построить график зависимости работы сил сопротивления АС от положения ведущего звена, т. е. АС = f (φ), в масштабе  (см. рис. 5.1, б).
(см. рис. 5.1, б).
Поскольку МПД = const, то, соединив прямой линией начальную и конечную точки графика АС = f (φ), можно найти график зависимости работ движущих сил AД от угла поворота ведущего звена φ, т.е. AД = f (φ).
Построить график зависимости приращения кинетической энергии машины (избыточных работ) от угла поворота кривошипа: ∆Т = f (φ) (см. рис. 5.1, в).
Составить выражение для подсчета кинетической энергии звеньев механизма и построить график изменения кинетической энергии звеньев по углу поворота кривошипа, т.е. ТМ = f (φ), в том же масштабе, что и график ∆Т = f (φ) (см. рис. 5.1, г).
Вычитая из ординат графика ∆Т = f (φ) соответствующие ординаты графика ТЗВ = f (φ), построить кривую изменения кинетической энергии маховика (см. рис. 5.1, д).
По построенной кривой определить момент инерции маховика:
Таким образом, момент инерции маховика по методу Н.И. Мерцалова определяется по графику ТМ = f (φ).
5.6. Расчет момента инерции по методу Ф. Виттенбауэра
(с помощью диаграммы энергомоментов)
Этот метод в отличие от метода Н.И. Мерцалова является принципиально точным, так как в нем не допускается никаких приближений, могущих вызвать ошибки при определении момента инерции маховика.
5.6.1. Диаграмма моментов (Т = f (JП))
Исследования многих вопросов движения машины удобно вести по так называемой диаграмме энергомоментов – диаграмме зависимости приращения кинетической энергии машины Т от ее приведенного момента инерции JП. Эта зависимость для периодически неравномерно установившегося движения имеет вид замкнутой кривой, так как значения Т и JП периодически повторяются (рис. 5.2).
Диаграмму Т = f (JП) можно построить для каждой машины, если заданы силы, действующие на нее, массы и моменты инерции звеньев и начальная кинетическая энергия машины Т0.
Зависимость между кинетической энергией машины Т,ее приведенным моментом инерции JП и угловой скоростью ω определяется выражением

откуда  Используя данное выражение, по диаграмме Т = f (JП) легко определить скорость ведущего звена для любого положения механизма. Пусть заданному положению механизма соответствует точка В на кривой Т = f (JП) с координатами х, у. Тогда для этого положения Т = μТу, JП = μJПх.
Используя данное выражение, по диаграмме Т = f (JП) легко определить скорость ведущего звена для любого положения механизма. Пусть заданному положению механизма соответствует точка В на кривой Т = f (JП) с координатами х, у. Тогда для этого положения Т = μТу, JП = μJПх.
Подставляя значения Т и JП, получим:
т.е. квадрат угловой скорости ведущего звена прямо пропорционален тангенсу угла наклона луча, проведенного из начала координат в соответствующую точку диаграммы, к оси JП. Проведем из начала координат к кривой Т = f (JП) две касательные, охватывающие кривую (см. рис. 5.2). Очевидно, что нижняя касательная, составляющая с осью JП минималь-
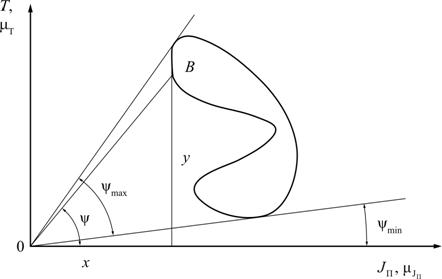
Рис. 5.2. Расчет момента инерции по методу Ф. Виттенбауэра
ный угол  , соответствует
, соответствует  , а верхняя касательная, составляющая с осью JП угол
, а верхняя касательная, составляющая с осью JП угол  , соответствует
, соответствует  :
:

Таким образом, построив диаграмму Т = f (JП) и проведя через начало координат к кривой касательные, легко измерить углы и вычислить и , а следовательно, и δ. При определении момента инерции маховика JП необходимо решить обратную задачу – по заданным δ и  пределить JП.
пределить JП.
5.6.2. Алгоритм расчета момента инерции маховика
по методу Ф. Виттенбауэра
1. Для определения момента инерции маховика предварительно выполняются вычисления и построения, приведенные в пунктах 5.1–5.4.
2. По данным графика ∆Т = f (φ) и JП = f (φ) путем графического исключения угла φ строится неполная диаграмма ∆Т = f (JП). Она отличается от полной диаграммы энергомоментов Т = f (JП). Построение диаграммы ∆Т = f (φ) показано на рис. 5.3.
3. К кривой ∆Т = f (φ) проводятся две касательные под углами и , которые соответствуют и .
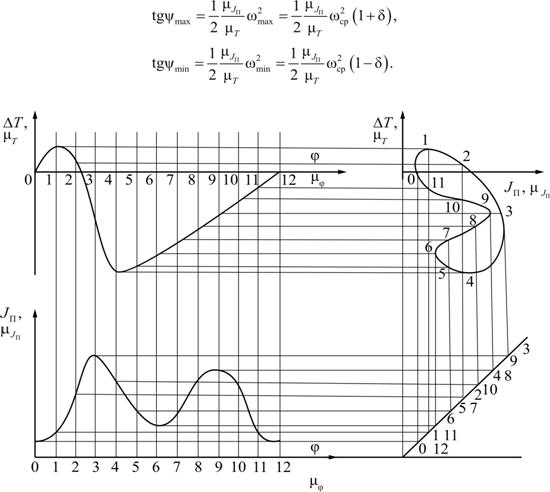
Рис. 5.3. Расчет маховика по методу Виттенбауэра
Точка пересечения этих касательных определит начало координат, в которых построенная кривая будет представлять графики зависимости полной кинетической энергии машины (рис 5.4) Т = Т0 + ∆Т и полного приведенного момента, включая момент инерции маховика J = JM + JП.
Определив начало координат полной диаграммы энергомасс Т = f (Jп), можно найти момент инерции маховика JП и начальную кинетическую энергию Т0 так, как показано на рис. 5.4. Отрезок ОС в масштабе  представляет собой искомый момент инерции маховика: Jм = µJп (ОС).
представляет собой искомый момент инерции маховика: Jм = µJп (ОС).
Погрешность расчета этим методом возникает при проведении касательных, так как углы ψmax и ψmin, особенно при малых δ, очень близки друг к другу, что затрудняет точное проведение касательных и определение положения начала координат точки О. Касательные в этом случае в пределах чертежа обычно не пересекаются. Тогда момент инерции маховика:
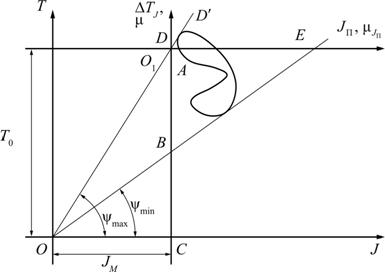
Рис. 5.4. Определение истинного закона движения ведущего звена
Взяв разность тангенсов, получим

¨ или
Иногда (при больших значениях углов ψmax и ψmin) касательные в пределах чертежа не пересекают ось ординат Т, но пересекают ось абсцисс в точках D и Е. Тогда, измерив отрезки О1D и О1Е, отрезок АВ можно вычислить следующим образом. Из рис. 5.4 О1А = О1D·tg ψmax, O1B = O1ED·tg ψmin, откуда AB = O1B – O1A = O1ED·tg ψmin – О1D·tg ψmax.
Дата добавления: 2018-04-15; просмотров: 1021; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!