КИНЕМАТИЧЕСКИЙ АНАЛИЗ И СИНТЕЗ МНОГОЗВЕННЫХ ЗУБЧАТЫХ МЕХАНИЗМОВ
Многоколесные передачи с неподвижными осями колес
Передаточное отношение таких передач равно произведению передаточных отношений простых передач, составляющих данную.
Виды передач: рядовая и ступенчатая.
 В рядовой передаче (рис. 3.2.1) промежуточные колеса имеют по два зацепления. Они не влияют на модуль передаточного отношения, но позволяют изменять направление вращения.
В рядовой передаче (рис. 3.2.1) промежуточные колеса имеют по два зацепления. Они не влияют на модуль передаточного отношения, но позволяют изменять направление вращения.
|
|
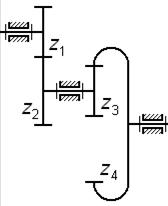
В ступенчатой передаче (рис. 3.2.2) промежуточные колеса парами жестко посажены на промежуточные валы. Они влияют на величину передаточного отношения:  .
.
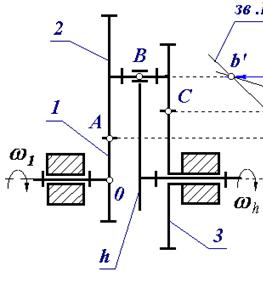
Планетарные передачи
Зубчатые механизмы, в которых ось хотя бы одного колеса подвижна, называются планетарными.
Элементы планетарного механизма имеют специальные названия :
§ зубчатое колесо с внешними зубьями, расположенное в центре механизма называется "солнечным";
§ колесо с внутренними зубьями называют "короной" или "эпициклом";
§ колеса, оси которых подвижны, называют "сателлитами";
подвижное звено, на котором установлены сателлиты, называют "водилом", которое принято обозначать латинской буквой h.
Планетарный механизм, имеющий неподвижное колесо называют
|
 Передаточное отношение простого планетарного механизма, вычисленное от колеса к водилу, находят по формуле Виллиса
Передаточное отношение простого планетарного механизма, вычисленное от колеса к водилу, находят по формуле Виллиса  , где
, где  − передаточное отношение обращенного механизма (механизма с остановленным водилом и освобожденными колесами).
− передаточное отношение обращенного механизма (механизма с остановленным водилом и освобожденными колесами).
|
|
|
| |

 При ведущем водиле вычисляется передаточное отношение от водила к колесу:
При ведущем водиле вычисляется передаточное отношение от водила к колесу:  .
.
 Основные схемы простых планетарных механизмов.
Основные схемы простых планетарных механизмов.
1.  Механизм Джемса. Применяется для получения передаточных отношений
Механизм Джемса. Применяется для получения передаточных отношений  . Имеет высокий КПД. Компактен и поэтому часто монтируется в одном корпусе с двигателем (мотор-редуктор).
. Имеет высокий КПД. Компактен и поэтому часто монтируется в одном корпусе с двигателем (мотор-редуктор).
2.
|
 . Имеет довольно высокий высокий КПД .
. Имеет довольно высокий высокий КПД .
3. Механизм с двумя внешними (рис. 3.2.3) или внутренними зацеплениями. Применяется при ведущем водиле для получения передаточных отношений  . Имеет невысокий КПД.
. Имеет невысокий КПД.
 Дифференциальные механизмы. Планетарный механизм со всеми подвижными колесами называют дифференциальным. Он имеет 2 степени свободы, что определяет специфику его применения.
Дифференциальные механизмы. Планетарный механизм со всеми подвижными колесами называют дифференциальным. Он имеет 2 степени свободы, что определяет специфику его применения.
Способы применения:
с двумя входными и одним выходным звеном. В случае выходного водила его угловая скорость равна
 ;
;

§ 
|
|
|
|
§
|
§ планетарная коробка скоростей. Различные скорости выходного вала получаются при последовательной остановке колес дифференциального механизма.
Условия, накладываемые на числа зубьев и сателлитов.
1. Условие соосности. Кинематическая схема механизма накладывает условия на размеры начальных окружностей колес. Например, для механизма Джемса (рис. 3.2.4) должно выполняться соотношение  . Для нулевых колес одинакового модуля получается
. Для нулевых колес одинакового модуля получается  .
.
2. Условие сборки также накладывается на числа зубьев колес, если число сателлитов больше 1. Для каждой схемы в справочниках можно найти таблицы чисел зубьев для получения разных передаточных отношений.
3. Условие соседства проверяется, если число сателлитов больше двух: расстояние между осями соседних сателлитов должно быть больше диаметра их окружностей головок.
|
|
|
СИНТЕЗ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Основы классификации
Устройство: состоит из кулачка 1, толкателя 2 и стойки (рис. 4.1.1).
Кулачковые механизмы различают по следующим признакам:
§ пространственный или плоский;
§ по характеру движения кулачка: с вращающимся или поступательно движущимся;
§  по характеру движения толкателя: с поступательно движущимся или качающимся;
по характеру движения толкателя: с поступательно движущимся или качающимся;
§ по виду толкателя: с острием, роликом или тарелкой;
§ по виду замыкания: силовое (пружина) или кинематическое (паз, рамка и др.) (рис. 4.1.3).
Типовая диаграмма хода толкателя содержит 4 этапа, отмеченные фазовыми углами (рис. 4.1.2):
 − угол удаления;
− угол удаления;
|
 − угол дальнего выстоя;
− угол дальнего выстоя;
 − угол приближения;
− угол приближения;
 − угол ближнего выстоя.
− угол ближнего выстоя.
Углы выстоя могут отсутствовать.
Дата добавления: 2018-04-15; просмотров: 701; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!