БИНС с параметрами Родрига-Гамильтона
Рассмотрим принципы построения БИНС с использованием кватернионов
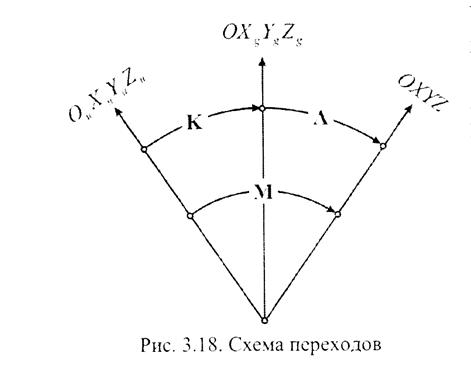
Введем в рассмотрение кватернионы для последовательного выполненного преобразования от инерциального трехгранника  к географическому
к географическому  и от географического к связанному
и от географического к связанному  . Переход от трехгранника к трехграннику обозначим посредством кватерниона
. Переход от трехгранника к трехграннику обозначим посредством кватерниона  , а переход от трехгранника к связанному обозначим посредством кватерниона
, а переход от трехгранника к связанному обозначим посредством кватерниона  . Переход от к обозначим посредством кватерниона
. Переход от к обозначим посредством кватерниона  (см. рисунок)
(см. рисунок)
Имеем
 (*)
(*)
Для реализации алгоритмов БИНС необходимо иметь информацию о положении связанного трехгранника относительно географического. Эта информация может быть получена из кватерниона . Зная этот кватернион можно пересчитать кажущееся ускорение ЛА в географическую систему координат и определить параметры ориентации  . Эти углы могут быть вычислены с использованием выражений
. Эти углы могут быть вычислены с использованием выражений



Рассмотрим процедуру вычисления кватерниона , используя (*)
Получим

Кватернионы  и могут быть найдены интегрированием кинематических уравнений
и могут быть найдены интегрированием кинематических уравнений
 ,
,  ,
,
 ,
,  ,
,
где  и -гиперкомплексные отображения векторов абсолютной угловой скорости географического и связанного трехгранников.
и -гиперкомплексные отображения векторов абсолютной угловой скорости географического и связанного трехгранников.
По элементов кватерниона могут быть найдены инерциальная широта и долгота.
Компоненты вектора угловой скорости  могут быть найдены из навигационного алгоритма аналогично БИНС с двумя уравнениями Пуассона. Что касается вектора угловой скорости
могут быть найдены из навигационного алгоритма аналогично БИНС с двумя уравнениями Пуассона. Что касается вектора угловой скорости  то его компоненты измеряются ДУС.
то его компоненты измеряются ДУС.
|
|
|
Блок - схема с интегрированием двух кинематических уравнений в кватернионах представлена на рисунке

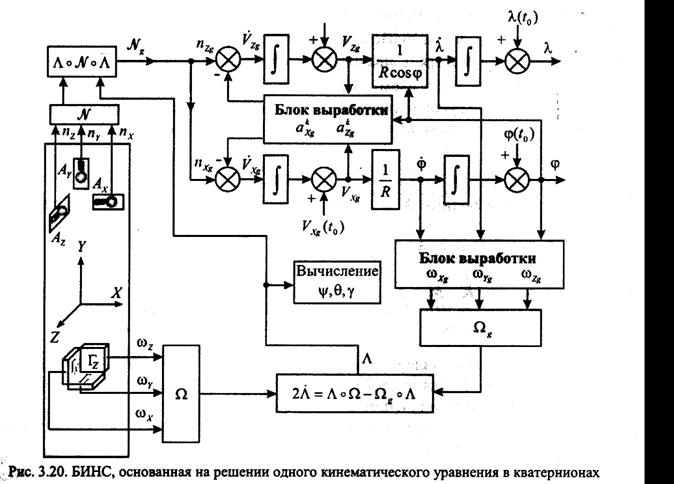
Рассмотрим схему с интегрированием одного кинематического уравнения
Для вывода этого уравнения продиференцируем обе части равенства

Используя
и получим

Учитывая, что  , получим следующее уравнение
, получим следующее уравнение
 .
.
Это уравнение является аналогом обобщенного уравнения Пуассона
Блок схема такой БИНС представлена на рисунке
Модель ошибок БИНС
Рассмотренные выше навигационные алгоритмы получили название алгоритмов идеальной работы.
Уравнения отклонений БИНС от невозмущенного поведения называют уравнениями ошибок.
Цель расчета ошибок заключается в установлении связей между погрешностями элементов и неточным вводом начальных условий с одной стороны, и погрешностями выработки выходных данных БИНС с другой.
Анализ погрешностей БИНС базируется на решении уравнений ошибок, получаемых с помощью уравнений в вариациях , представляющих собой линейные уравнения первого приближения относительно возмущений воздействующих на систему. Такие уравнения могут быть получены либо формальной вариацией алгоритмов БИНС , либо подстановкой в алгоритмы БИНС суммы переменной и ее приращения. Из образующихся уравнений вычитают уравнения идеальной работы и пренебрегают нелинейными членами и их произведениями.
Дата добавления: 2018-04-05; просмотров: 1606; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!