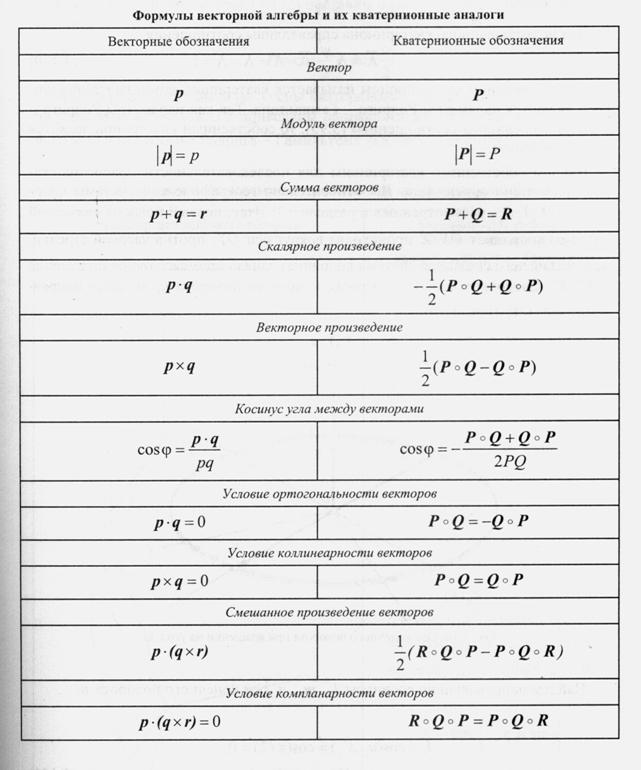
Основные свойства кватерниона
Сумма кватернионов
 .
.
Как следствие, можем записать свойство коммутативности
 .
.
и свойство ассоциативности
 .
.
2.Разность кватернионов

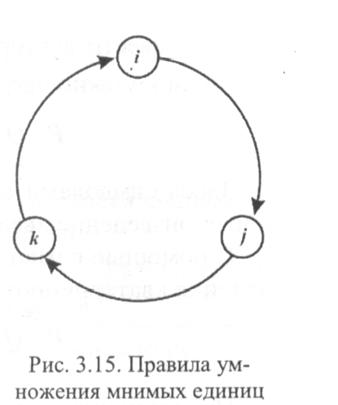
Произведениеобозначается символом«  »и определяется правилами перемножения мнимых единиц
»и определяется правилами перемножения мнимых единиц
 ,
,  ,
,  ,
, 
 ,
,  ,
,  ,
,
 ,
,  ,
,  .
.
Пример. Найти произведение двух кватернионов
 ,
, 

Можно показать, что если ввести в рассмотрение векторы  и
и  , то произведение кватернионов представимо в виде
, то произведение кватернионов представимо в виде

Можно также показать, что

Как следствие также может быть записано

где правая часть содержит как скалярное, так и векторное произведение векторов.
Сопряженное произведение кватернионов

Так как  ,
,
 ,
,
то

Число  называется нормой кватерниона и обозначается как
называется нормой кватерниона и обозначается как 

Произведение кватернионов, имеющих нулевые скалярные части
При  ,
,  имеем
имеем

 .
.
Тогда
 /
/
Обратный кватернион
Обратный кватернион  определяется из условия
определяется из условия
 .
.
Умножая справа это выражение на сопряженный кватернион, получим

С учетом ассоциативности имеем
 .
.
Для нормированного кватерниона имеют место соотношения
 ,
,  .
.
Собственные кватернионы
-это кватернионы с параметрами Родрига-Гамильтона. Так как эти параметры связаны соотношением
 ,
,
то собственный кватернион является нормированным.
Найдем кватернионы для последовательности поворотов на угол рыскания , тангажа и крена.
Первый поворот на угол рыскания  (см. рисунок). Осью конечного поворота
(см. рисунок). Осью конечного поворота  является ось
является ось  .
.
|
|
|
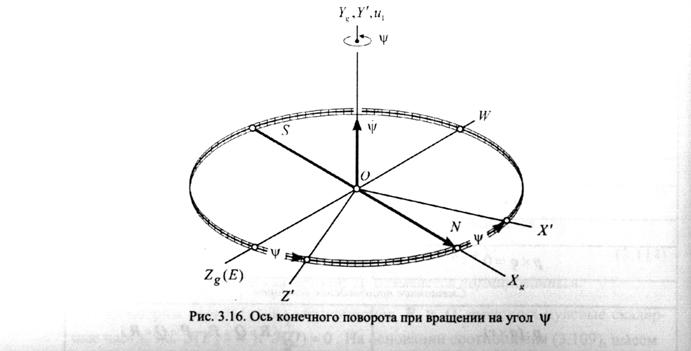
Найдем направляющие косинусы 
 ,
,
 ,
,
 ,
,
и параметры Родрига- Гамильтона
 ,
,  ,
,  ,
,  .
.
Совокупности этих параметров поставим в соответствие собственный кватернион
Аналогично могут быть получены кватернионы для других поворотов
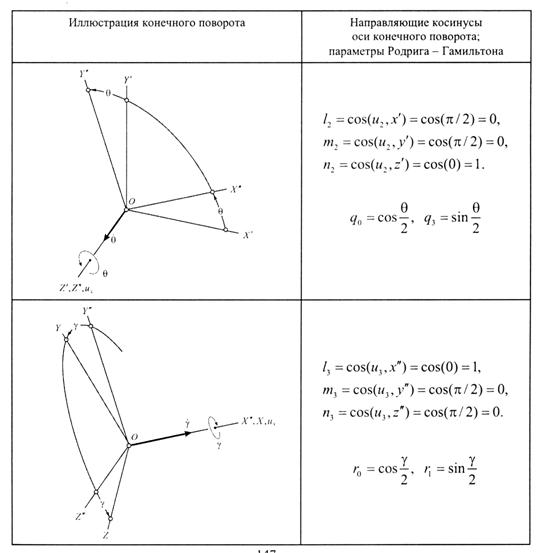
и могут быть записаны кватернионы
 ,
,  .
.
Для того, чтобы определить результирующий кватернион
 ,
,
характеризующий взаимное положение системы координат  и
и  необходимо найти произведение
необходимо найти произведение
 .
.
Можно показать, что параметрами кватерниона  будут параметры
будут параметры
 ,
,
 ,
,
 ,
,
 .
.
Рассмотрим . как преобразуются компоненты некоторого вектора  при переходе от системы координат к системе .
при переходе от системы координат к системе .

 .
.
Кватернионы  и
и  называются гиперкомплексными отображениямивектора на базисы и .
называются гиперкомплексными отображениямивектора на базисы и .
Если переход от системы координат в системе осуществляется с использованием кватерниона , то имеет место следующее равенство
 ,
,
называемое равенством перепроектирования
Умножая это равенство справа на  , с учетом нормированности кватерниона можно также получить равенство
, с учетом нормированности кватерниона можно также получить равенство
Кинематические уравнения для кватерниона
Заменим векторное уравнение линейной скорости объекта
его кватернионным аналогом
|
|
|
 , (*)
, (*)
где  -гиперкомплексные отображения вектора абсолютной линейной скорости
-гиперкомплексные отображения вектора абсолютной линейной скорости  , вектора угловой скорости
, вектора угловой скорости  и вектора .
и вектора .
Пусть переход от неподвижной системы координат  к подвижной
к подвижной  осуществляется кватернионом . Тогда преобразование компонент вектора
осуществляется кватернионом . Тогда преобразование компонент вектора  из системы в компоненты вектора в системе
из системы в компоненты вектора в системе  подчиняется обратному равенству перепроектирования
подчиняется обратному равенству перепроектирования
 .
.
Дифференцируя обе части уравнения получим
 .
.
Умножая слева на кватернион получим

откуда
 . (**)
. (**)
В этом уравнении величина  есть абсолютная линейная скорость
есть абсолютная линейная скорость  , поэтому левые части равны
, поэтому левые части равны
Получим

или
 .
.
Это уравнение и является кинематическим уравнением для кватерниона
Решая это уравнение , представленное в скалярном виде можно определить параметры Родрига –Гамильтона, через проекции угловой скорости , при этом эти параметры характеризуют положение подвижной системы координат относительно неподвижной .
Дата добавления: 2018-04-05; просмотров: 1277; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!