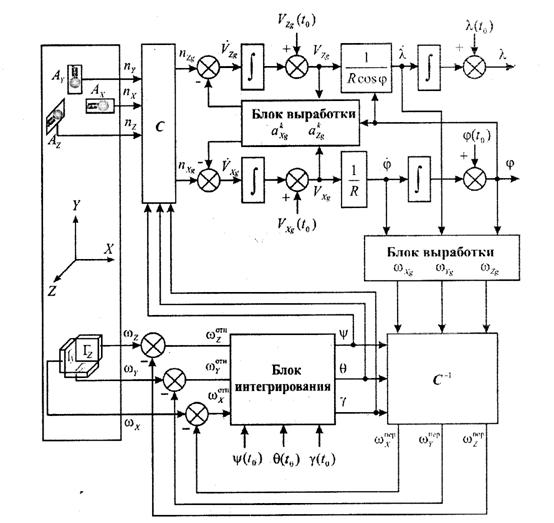
БИНС на неуправляемых гироскопах
В БИНС такого типа задача ориентации решается с помощью неуправляемых гироскопов (НГ). В общем случае для решения задачи ориентации необходимо два НГ с кинетическими моментами, перпендикулярными друг другу в начальный момент времени. Рассмотрим движение ЛА в плоскости меридиана сферической и не вращающейся Земли. В данном случае задачу навигации и ориентации можно решить с помощью одного НГ и двух акселерометров. См рисунок.
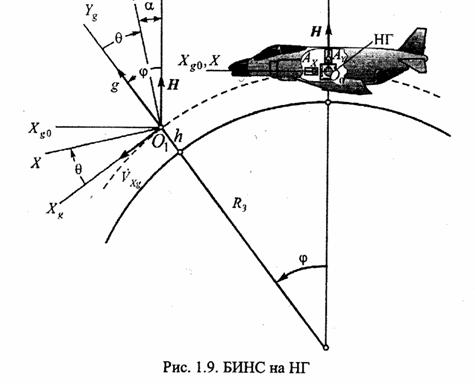
Пусть в начальный момент времени кинетический момент гироскопа  совпадает с вертикалью
совпадает с вертикалью  .ЛА перемещается в точку
.ЛА перемещается в точку  причем связанная система координат повернута на угол тангажа вокруг оси
причем связанная система координат повернута на угол тангажа вокруг оси  . В силу свойства свободного гироскопа сохранять свою главную ось неизменной относительно инерциального пространства кинетический момент в точке будет иметь тоже направление, что и в точке
. В силу свойства свободного гироскопа сохранять свою главную ось неизменной относительно инерциального пространства кинетический момент в точке будет иметь тоже направление, что и в точке  . С датчика угла НГ снимается угол
. С датчика угла НГ снимается угол  т.е. угол между вертикальной осью
т.е. угол между вертикальной осью  ЛА и кинетическим моментом. Как следствие может быть установлена следующая связь между показаниями НГ широтой и углом тангажа:
ЛА и кинетическим моментом. Как следствие может быть установлена следующая связь между показаниями НГ широтой и углом тангажа:
 .
.
Из этого соотношения следует, что для определения угла тангажа необходимо привлекать широту  из навигационного алгоритма.
из навигационного алгоритма.
Блок схема БИНС на НГ приведена на рисунке.
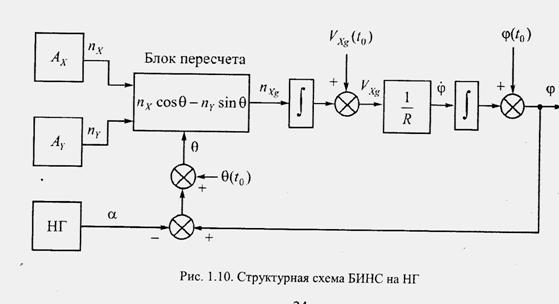
В качестве НГ в БИНС такого типа, как правило, используются свободные гироскопы с электростатическим подвесом ротора.
БИНС на акселерометрах и ДУС
|
|
|
БИНС с углами Эйлера-Крылова.
Для определения положения объекта на поверхности Земли наибольшее распространение получили географические координаты: широта и долгота  . Для летательных аппаратов вводится еще одна координата –высота над уровнем моря
. Для летательных аппаратов вводится еще одна координата –высота над уровнем моря  . Широта определяется углом, образуемым нормалью к земному сфероиду и плоскостью экватора Земли. Долготу измеряют двугранным углом , между плоскостью меридиана, проходящему через точку
. Широта определяется углом, образуемым нормалью к земному сфероиду и плоскостью экватора Земли. Долготу измеряют двугранным углом , между плоскостью меридиана, проходящему через точку  и плоскостью гринвичского меридиана. Введем нормальную систему координат
и плоскостью гринвичского меридиана. Введем нормальную систему координат  ( по ГОСТ 20058-80) с вершиной , совмещенной с центром масс объекта, ось
( по ГОСТ 20058-80) с вершиной , совмещенной с центром масс объекта, ось  которого направлена на север по касательной к мередиану, ось по касательной к параллели , ось
которого направлена на север по касательной к мередиану, ось по касательной к параллели , ось  -вдоль вертикали места вверх. Такая система называется географическим сопровождающим трехгранником.
-вдоль вертикали места вверх. Такая система называется географическим сопровождающим трехгранником.
Для построения алгоритмов БИНС необходимо найти кинематические элементы движения: проекции угловой скорости вращения трехгранника на его оси и проекции абсолютного линейного ускорения его вершины.
Пусть точка перемещается с линейной скоростью  относительно поверхности Земли. Проекции линейной скорости на оси обозначим как
относительно поверхности Земли. Проекции линейной скорости на оси обозначим как  ,
,  ,
,  (см. рисунок)
(см. рисунок)
Исходя из рисунка, проекции линейной скорости имеют вид
|
|
|
 ,
, 
 ,
,
где  -горизонтальная составляющая скорости ЛА;
-горизонтальная составляющая скорости ЛА;  -курсовой угол-угол между направлением на север и вектором скорости .
-курсовой угол-угол между направлением на север и вектором скорости .
Абсолютная угловая скорость трехгранника складывается из переносной угловой скорости, обусловленной вращением Земли вокруг оси и относительной скорости вращения трехгранника вследствие перемещения объекта вдоль земной поверхности.
Вектор угловой скорости Земли  имеет следующие проекции на оси географической системы координат
имеет следующие проекции на оси географической системы координат
 ,
,  ,
,  .
.
Здесь  и
и  -горизонтальная и вертикальная проекции угловой скорости Земли.
-горизонтальная и вертикальная проекции угловой скорости Земли.
При движении объекта вдоль параллели широта остается постоянной, а географическая система координат поворачивается вокруг оси вращения Земли с угловой скоростью  . Изменение долготы можно также представить через восточную составляющую линейной скорости объекта как
. Изменение долготы можно также представить через восточную составляющую линейной скорости объекта как
 .
.
Вектор угловой скорости  направлен в отрицательную сторону оси , а его модуль равен
направлен в отрицательную сторону оси , а его модуль равен  .
.
Как следствие, проекции угловой скорости географического трехгранника на его оси будут равны

Преобразуя полученные выражения, будем иметь
 ,
,
 ,
,
 .
.
Найдем теперь проекции абсолютного ускорения движущейся вершины трехгранника на его ребра.
|
|
|
Абсолютное ускорение складывается из следующих составляющих
где  - переносное ускорение,
- переносное ускорение,  -относительное ускорение;
-относительное ускорение;  -кориолисово ускорение.
-кориолисово ускорение.
Кориолисово ускорение вызвано переносной угловой скоростью вращения Земли и линейной относительной скоростью объекта и выражается векторным произведением
где  -орты осей системы координат . Раскрывая определитель , можно найти проекции кориолисова ускорения на оси .
-орты осей системы координат . Раскрывая определитель , можно найти проекции кориолисова ускорения на оси .
 ,
,
 ,
,
 .
.
Относительное ускорение вызвано изменением относительной линейной скорости

и движением объекта вдоль сферической поверхности Земли с относительной угловой скоростью
 .
.
 .
.
Из этого выражения можно найти
 ,
,
 ,
,
 .
.
Переносное ускорение  вызвано угловой скоростью вращения Земли и определяется как
вызвано угловой скоростью вращения Земли и определяется как
 .
.
Отсюда имеем
 ,
,
 ,
,
 .
.
Принимая во внимание, что акселерометры измеряют кажущееся ускорение получим проекции кажущегося ускорения вершины трехгранника на его оси

 (*)
(*)
 .
.
В действительности инерциальные чувствительные элементы жестко установлены на борту подвижного объекта . В этом случае акселерометры измеряют проекции вектора кажущегося ускорения на ребра связанного с объектом трехгранника и показания акселерометров необходимо перепроектировать в географическую систему координат в соответствии с информацией, выработанной в блоке ориентации.
|
|
|
Предположим, что эта задача решена. Но для решения навигационной задачи необходимо знание ускорений  ,
,  ,
,  , поэтому часть ускорений в правой части уравнений (*) должна быть скомпенсирована. Из(*) следует , что компенсирующие составляющие ускорений будут равны
, поэтому часть ускорений в правой части уравнений (*) должна быть скомпенсирована. Из(*) следует , что компенсирующие составляющие ускорений будут равны

 (*)
(*)

Таким образом, на вход первых интеграторов необходимо подавать следующие величины:


 .
.
Составляющие скорости движения объекта образуются после интегрирования ускорений


 .
.
Координаты объекта определяются с помощью вторичного интегрирования с учетом начальных значений
 ,
,
 .
.
Таким образом, полученные уравнения реализуют навигационный алгоритм БИНС позволяющий определить координаты и составляющие скоростей объекта.
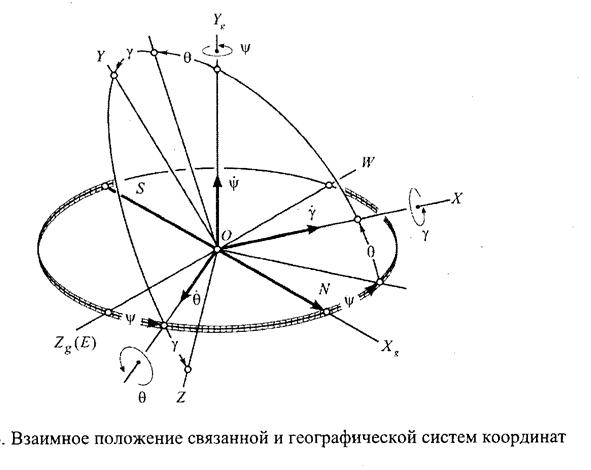
Рассмотрим задачу ориентации ЛА относительно географической системы координат. Введем в рассмотрение трехгранник  , оси которого направлены вдоль строительных осей ЛА. Ось
, оси которого направлены вдоль строительных осей ЛА. Ось  совпадает с продольной осью ЛА, ось
совпадает с продольной осью ЛА, ось  совпадает с поперечной осью и направлена в сторону правого крыла, ось
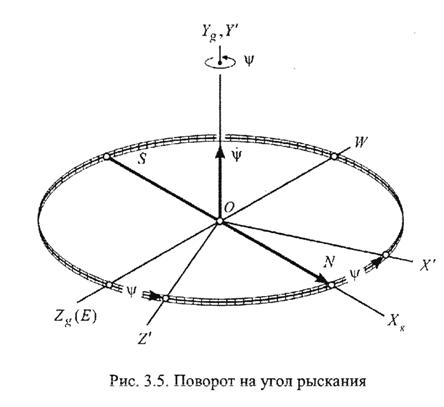
совпадает с поперечной осью и направлена в сторону правого крыла, ось  направлена вверх. Положение строительных осей относительно географического трехгранника определяется тремя углами: рыскания (курса), тангажаикрена.
направлена вверх. Положение строительных осей относительно географического трехгранника определяется тремя углами: рыскания (курса), тангажаикрена.
Угол рыскания  -угол , отсчитываемый в горизонтальной плоскости
-угол , отсчитываемый в горизонтальной плоскости  от оси
от оси  против хода часовой стрелки до проекции продольной оси объекта на эту плоскость.
против хода часовой стрелки до проекции продольной оси объекта на эту плоскость.
Угол тангажа  отсчитывают в вертикальной плоскости между осью и ее проекцией на горизонтальную плоскость.
отсчитывают в вертикальной плоскости между осью и ее проекцией на горизонтальную плоскость.
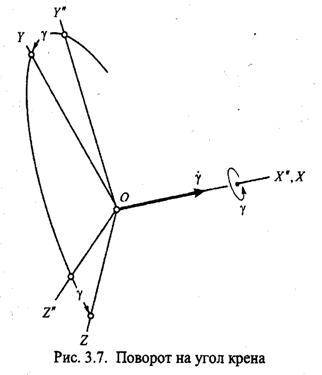
Угол крена  отсчитывают в поперечной плоскости между осью и линии пересечения указанной плоскости с плоскостью горизонта. Когда правое крыло находится ниже горизонта крен считается положительным.
отсчитывают в поперечной плоскости между осью и линии пересечения указанной плоскости с плоскостью горизонта. Когда правое крыло находится ниже горизонта крен считается положительным.
Углы ориентации: , , называют самолетными углами или углами Эйлера-Крылова. Определим матрицы направляющих косинусов при переходе от географической системы координат к связанной системе координат .
Полагая, что вначале трехгранники совпадают то переход от географической системы координат к связанной может быть осуществлен с помощью трех последовательных поворотов: вначале на угол рыскания против стрелки часов при этом связанная система координат займет промежуточное положение. При этом таблица направляющих косинусов имеет вид
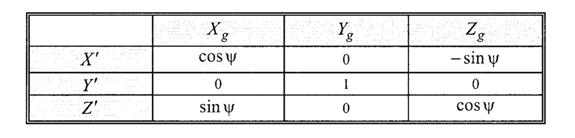
В соответствии с таблицей введем квадратную матрицу поворота
 .
.
Второй поворот проведем относительно промежуточной оси  на угол тангажа против стрелки часов.
на угол тангажа против стрелки часов.
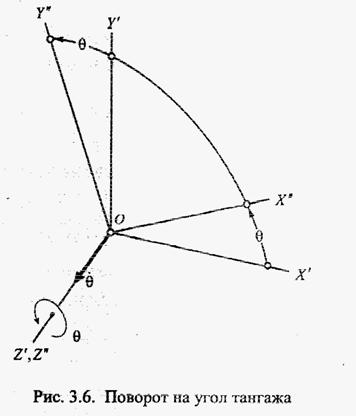
При этом матрица поворота будет иметь вид
Последний поворот осуществим на угол крена вокруг промежуточной оси которая является продольной осью ЛА.
которая является продольной осью ЛА.
Третий поворот приводит трехгранник  к трехграннику .
к трехграннику .
Полная цепочка преобразований выглядит следующим образом:

Введем обозначение  .
.
где матрица  является искомой матрицей преобразований от трехгранника к трехграннику .
является искомой матрицей преобразований от трехгранника к трехграннику .
Легко показать, что матрица будет равна
Так как в БИНС проводится обратное преобразование от трехгранника к трехграннику , рассмотрим обратную матрицу преобразований

 .
.
Отметим, что матрицы поворота являются ортогональными, и для них справедливо соотношение
 .
.
Введем матрицу  , т.е.
, т.е.
 , при этом матрица будет равна
, при этом матрица будет равна

Найдем проекции вектора абсолютной скорости связанного трехгранника на свои ребра
Это выражение с учетом матриц  может быть записано в виде
может быть записано в виде
Первое слагаемое в правой части представляет собой переносную угловую скорость связанного трехгранника, а второе относительную. Для определения параметров ориентации ЛА необходимо скомпенсировать составляющие угловой скорости , вызванной вращением Земли и перемещением ЛА вдоль ее поверхности. Составляющие угловой переносной скорости вырабатываются по показаниям акселерометров. Если эти составляющие скомпенсированы то проекции угловой скорости трехгранника относительно географической системы координат имеют вид
Разрешая эти уравнения относительно производных легко получить систему уравнений

 ,
,
 .
.
Эти уравнения называются кинематическими уравнениями в углах Эйлера Крылова. Проинтегрировать эти уравнения можно численными методами.
Структурная схема горизонтальных каналов БИНС представлена на рисунке
Дата добавления: 2018-04-05; просмотров: 2501; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!