Определение области устойчивости на плоскости парамет-ров (T,K)
Плоскостью параметров (T,K) будем называть координатную плоскость, где по оси абсцисс откладываются значения параметра Т,
а по оси ординат – значения параметра К. Областью устойчивости на данной плоскости называется такая область, в которой координа-ты любой точки – это такие значения параметров, при которых си-стема устойчива. Вне области устойчивости находится область не-устойчивости, в которой значения Т и К таковы, что система будет неустойчива. Области устойчивости и неустойчивости разделяет граничная линия, в точках которой значения Т и К таковы, что си-стема находится на границе устойчивости.
2
З а д а н и е 7 .Определить область устойчивости в диапазонеизменения параметра Т от 0 до 1.
Для определения области устойчивости необходимо провести на плоскости (T,K) граничную линию. Разбейте отрезок Т=0…1 на рав-ные части с шагом 0,1. Для каждого значения Т найдите такое зна-чение К, при котором система оказывается на границе устойчивости. Таким образом, будут получены точки граничной линии. Отметьте эти точки на плоскости (Т, К) и соедините плавной кривой. Область устойчивости находится ниже граничной линии.
З а д а н и е 8 .Выберите произвольную точку в области устой-чивости и в области неустойчивости. Убедитесь, что с параметрами
Т и К, соответствующим этим точкам, система действительно в пер-вом случае устойчива, во втором – неустойчива. Для доказательства устойчивости и неустойчивости используйте переходную или весо-вую функцию системы. Сохраните графики переходных (или весо-вых) функций системы для этих двух точек.
Требования к отчету
Отчет по работе должен содержать:
1) название и цель работы;
2) структурную схему исследуемой системы;
3) переходную и весовую функции системы при исходных значениях параметров регулятора; вывод по устойчивости системы;
4) правило определения устойчивости замкнутой системы по ЛЧХ разомкнутой системы и правило определения запасов устойчивости по ам-плитуде и по фазе (записать словами);
5) графики ЛЧХ разомкнутой системы (при исходных значениях пара-метров регулятора) с отмеченными на них запасами устойчивости по ам-плитуде и по фазе; вывод об устойчивости замкнутой системы;
6) переходную (весовую) функцию системы при К=Ккр и Т=2 (запи-сать найденное значение Ккр);
7) ЛЧХ разомкнутой системы при Т=Ткр и К=10 (записать найденное значение Ткр);
8) плоскость параметров (Т,К) с заштрихованной областью устойчи-вости и выбранными точками в области устойчивости и области неустой-чивости (записать значения параметров К и Т в выбранных точках);
9) переходные (или весовые) функции системы для выбранных точек
в области устойчивости и в области неустойчивости.
Лабораторная работа № 5
Исследование качества переходных процессов линейных ав-томатических систем
Цель работы. Освоить экспериментальное определение показа-телей качества системы по ее переходной функции; исследовать влияние параметров системы на показатели качества.
Подготовка к работе
Соберите в рабочем окне модель исследуемой системы (рис.5.1). Для введения в систему звена чистого запаздывания используйте блок Delay. На вход модели подключите источник ступенчатого единичного сигнала, на выход – индикатор.

Рис.5.1. Структурная схема исследуемой системы.
Задания к работе и указания по ее выполнению
З а д а н и е 1 .Определите следующие показатели качества си-стемы по ее переходной функции:
- время первого согласования t1;
- время достижения максимума tm;
- время переходного процесса tпп (по входу переходной функции
в зону 5% от ее установившегося значения);
- перерегулирование ;
- декремент затухания колебаний .
Сохраните график переходной функции для отчета.
Примечание: переходный процесс начинается не в моментt=0,а позд-нее, т.к. в системе есть запаздывание. При определении первых трех пока-зателей время следует отсчитывать от начала процесса, а не от нуля.
З а д а н и е 2 .Исследуйте, как изменятся показатели качествапри увеличении и при уменьшении в 2 раза одного из параметров системы. Эксперимент проводится для следующих параметров:
- постоянная времени фильтра Тф;
- постоянная времени интегрального звена в регуляторе Трег(и); - постоянная времени форсирующего звена в регуляторе Трег(ф); - время запаздывания Tзап.
При изменении одного из параметров остальные параметры сле-дует установить равными исходным значениям (см. рис.5.1).
При каждом изменении параметров определите показатели ка-чества и сделайте вывод о том, как изменилось быстродействие си-стемы и ее колебательность. Результаты исследования запишите в таблицу (табл.5.1).
Таблица 5.1
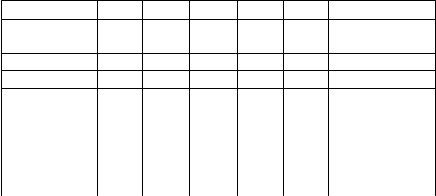
| t1 | tm | tпп | | | Вывод |
Исходная
система
Тф*
Тф
Трег(и)*

Трег(и)
Трег(ф)*
Трег(ф)
Tзап*
Tзап
Примечание:символ*обозначает увеличение параметра в двараза по сравнению с исходным значением; символ обозначает уменьшение параметра в два раза по сравнению с исходным значе-нием.
З а д а н и е 3 .Задайте исходные значения параметров системы.Найдите параметр системы, изменяя который (при исходных значе-ниях других параметров) можно добиться монотонного переходного процесса (перерегулирование равно нулю). Сохраните график полу-ченной переходной функции (без перерегулирования) для отчета.
З а д а н и е 4 .Удалите из модели звено запаздывания,а дляостальных звеньев задайте исходные значения параметров. Найдите такое значение постоянной времени форсирующего звена регулято-ра, при котором обеспечивается минимум интегральной оценки ка-чества:
| | 2 | d | | 2 | ||||
| e(t) dt | , | (5.1) | ||||||
| J e (t)dt 0.1 | ||||||||
| 0 | 0dt | | ||||||
где J – функционал качества, e – ошибка регулирования (раз-ность задания и регулируемой величины: е = x–y).
Если система устойчива, то с течением времени ошибка e(t) стремится к нулю. Поэтому интеграл ошибки стремится к постоян-ной величине. Интеграл квадрата ошибки (первое слагаемое функ-ционала) также стремится к постоянной величине и является ком-плексной оценкой быстродействия и скорости затухания переходно-
го процесса. Второе слагаемое функционала представляет собой ин-теграл квадрата производной ошибки и введено для ограничения быстродействия системы.
Для выполнения задания, в дополнение к модели системы, собе-рите в рабочем окне модель функционала качества в соответствии с формулой (5.1). Структурная схема модели функционала качества показана на рис.5.2. Данная модель является нелинейной, т.к. со-держит нелинейные звенья возведения в квадрат. На вход модели функционала качества подается ошибка e(t) из модели исследуемой системы. Процесс на выходе модели функционала качества пред-ставляет собой текущее значение интеграла в формуле (5.1). Функ-ционал качества определяется как установившееся значение этого процесса.
Переключите индикатор для наблюдения значения функционала качества. Изменяя постоянную времени форсирующего звена в ре-гуляторе, необходимо добиться, чтобы значение функционала было минимально возможным. В этом случае в системе имеет место оп-тимальный переходный процесс в соответствии с выбранным крите-рием оптимальности.
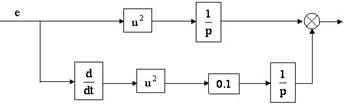
Рис.5.2. Модель вычисления функционала качества системы.
Сохраните оптимальный процесс для отчета. Определите пока-затели качества оптимального процесса.
Требования к отчету
Отчет по работе должен содержать:
1) название и цель работы;
2) структурную схему исследуемой системы;
3) переходную функцию системы при исходных значениях параметров
с отмеченными на ней значениями показателей качества;
4) таблицу с результатами исследования влияния параметров системы на показатели качества (см. табл.5.1);
5) переходную функцию системы при отсутствии перерегулирования (значение параметра, при котором она получена);
6) формулу функционала качества и структурную схему его модели; найденное минимальное значение функционала; переходную функцию оп-тимальной системы (и ее показатели качества).
Лабораторная работа № 6
Дата добавления: 2018-04-04; просмотров: 316; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!