Вопрос 38. Регулирование скорости двигателя постоянного тока последовательного возбуждения шунтированием якоря резистором.
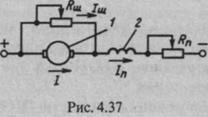 Регулирование скорости шунтированием якоря резистором используется для получения пониженных скоростей ЭП с ДПТПВ и определенной скорости его идеального холостого хода. Наибольшее распространение получила схема, в которой шунтирующий якорь 1 резистор Rш и последовательно включенный резистор Rп вместе с обмоткой возбуждения 2 образуют делитель напряжения. За счет этого к якорю двигателя подводится пониженное напряжение и его характеристики будут располагаться ниже естественной.
Регулирование скорости шунтированием якоря резистором используется для получения пониженных скоростей ЭП с ДПТПВ и определенной скорости его идеального холостого хода. Наибольшее распространение получила схема, в которой шунтирующий якорь 1 резистор Rш и последовательно включенный резистор Rп вместе с обмоткой возбуждения 2 образуют делитель напряжения. За счет этого к якорю двигателя подводится пониженное напряжение и его характеристики будут располагаться ниже естественной.
Особенностью рассматриваемой схемы является также то, что при нулевом токе якоря ток возбуждения за счет наличия резистора Rш не равен нулю, поэтому отличен от нуля магнитный поток и двигатель имеет определенную скорость идеального холостого хода w0.
Вопрос 39. Типовые схемы управления Ад с фазным ротором.
Включение двигателя производится нажатием кнопки SB1, после чего включается контактор КМ1. Статор двигателя подсоединяется к сети, электромагнитный тормоз YB растормаживается, и начинается разбег двигателя по реостатной характеристике, соответствующей наличию резистора Rд1 в цепи ротора.
Включение КМ1 приводит к срабатыванию контактора КМ4, который своими контактами шунтирует не нужный при пуске резистор противовключения Rд2, а так же разрывает цепь катушки реле времени КТ. Последнее, потеряв питание, начинает отсчет выдержки времени, после чего замыкает свои контакты в цепи катушки контактора КМ3, который срабатывает и шунтирует пусковой резистор Rд1 в цепи ротора, и двигателя выходит на свою естественную характеристику.
Для осуществления торможения двигателя нажимается кнопка SB2, размыкающий контакт которой разрывает цепь питания катушки контактора КМ1, и он отключается. После этого двигатель отключается от сети, разрывается цепь питания контактора КМ4 и замыкается цепь питания реле КТ. В результате этого контакторы КМ3 и КМ4 отключаются и в цепь ротора двигателя вводится сопротивление (Rд1+Rд2).
+ схема на странице 201
Вопрос 40. Торможение ЭП с ДПТ последовательного возбуждения.
Для осуществления торможения двигатель должен быть переведен в генераторный режим работы. Этот режим может быть реализован по двум схемам: с независимым возбуждением и самовозбуждением.
Самовозбуждение. Торможение с самовозбуждением реализуется при последовательном соединении обмоток якоря, возбуждения и резистора, который может отсутствовать. Для возникновения и существования этого режима необходимо выполнение следующих условий: наличие остаточного магнитного потока в двигателе, совпадение по направление остаточного и основного магнитного потока, создаваемого током возбуждения, сопротивление цепи обмотки якоря должно быть меньше критического. Торможение происходит следующим образом: при наличии остаточного магнитного поля и вращении якоря в нем наводится ЭДС, под действием которой по якорю протекает ток. Этот ток создает основной магнитный поток, который, совпадая по направлению с остаточным магнитным потоком, приведет к увеличению ЭДС. Это в свою очередь повлечет за собой увеличение тока в двигателе, и такой процесс его самовозбуждения будет продолжаться до тех пор, пока ЭДС не станет равной суммарному падению напряжения в цепи якоря.
Режим торможения противовключением осуществляется изменением полярности напряжения на обмотке якоря при сохранении того же направления тока в обмотке возбуждения. При этом изменяется знак момента двигателя. Для ограничения тока в этом режиме в цепь якоря водится добавочный резистор.
 Вопрос 41. Схемы замкнутых структур электрического привода
Вопрос 41. Схемы замкнутых структур электрического привода
 Замкнутый ЭП, как и любая система автоматического регулирования, может быть реализован либо по принципу отклонения с использованием обратных связей, либо по принципу компенсации внешнего возмущения. Основным отличительным признаком замкнутого ЭП является полное или частичное устранение влияния внешнего возмущения на регулируемую координату, например, скорость такого ЭП может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутые ЭП обеспечивают более качественное управление движением исполнительных органов, хотя их схемы оказываются более сложными.
Замкнутый ЭП, как и любая система автоматического регулирования, может быть реализован либо по принципу отклонения с использованием обратных связей, либо по принципу компенсации внешнего возмущения. Основным отличительным признаком замкнутого ЭП является полное или частичное устранение влияния внешнего возмущения на регулируемую координату, например, скорость такого ЭП может оставаться практически неизменной при возможных колебаниях момента нагрузки. В силу этого обстоятельства замкнутые ЭП обеспечивают более качественное управление движением исполнительных органов, хотя их схемы оказываются более сложными.
Для реализации принципа компенсации (рис. 1) возмущающего воздействия дополнительный сигнал, пропорциональный возмущению, подается на вход ЭП вместе с сигналом задания. В результате суммарный сигнал обеспечивает такое управление ЭП, при котором осуществляется компенсация внешнего воздействия и устранение тем самым его влияния на регулируемую координату. Несмотря на все достоинства, этот способ не нашел широкого применения в ЭП из-за сложности реализации датчиков возмущающих воздействий, в частности момента нагрузки М.
Особенностью ЭП, построенного по принципу отклонения (рис. 2), является наличие цепи обратной связи. Информация о регулируемой координате подается на вход ЭП в виде сигнала обратной связи, который сравнивается с задающим сигналом, и полученный результирующий сигнал (его называют сигналом рассогласования, отклонения или ошибки) является управляющим сигналом для ЭП. Если под влиянием возмущающего воздействия начинает изменяться регулируемая координата, то за счет выбора направления и силы воздействия обратной связи произойдет соответствующее изменение режима работы ЭП и полное или частичное восстановление ее уровня, т. е. в таких системах регулирование ведется с учетом результата регулирования.
Дата добавления: 2018-02-15; просмотров: 1231; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!