Приведите примеры аппаратов ручного и электромагнитного управления. Их условно-графические обозначения.
аппараты ручного управления (рубильники, переключатели, выключатели, контроллеры), действие которых происходит в результате механического воздействия на них внешних сил.  S Рубильн;
S Рубильн;  Кнопка "Пуск";
Кнопка "Пуск";  Кнопка "Стоп"электромагнитные аппараты (магнитные пускатели, , электромагнитные реле), работа которых основана на электромагнитных силах, возникающих при работе аппарата.
Кнопка "Стоп"электромагнитные аппараты (магнитные пускатели, , электромагнитные реле), работа которых основана на электромагнитных силах, возникающих при работе аппарата.
Приведите пример машины с абсолютно жесткой механической характеристикой. Поясните.
Синхронный и асинхронный гистерезисный электродвигатели. Такую характеристику имеют синхронные электродвигатели. При жесткой механической характеристике частота вращения электродвигателя -меняется незначительно при изменении вращающего момента. Такую характеристику имеют электродвигатели постоянного тока с параллельным возбуждением и асинхронные электродвигатели (в пределах рабочей части характеристики).
91. Приведите с пояснением характер изменения механической характеристики асинхронного электродвигателя при переключении числа пар полюсов. Рассмотрим принцип получения различного числа пар полюсов при переключении частей обмотки статора на следующем упрощенном примере. На рис. 1 показана схема одной фазы статорной обмотки, которая состоит из двух одинаковых частей 1н—1к, 2н—2к, имеющих два проводника. Если секции соединены так, как это показано на рис. 1а, и к обмотке статора подведен ток I, имеющий в данный момент времени направление, показанное стрелками, то образуется магнитное поле с четырьмя полюсами, т. е. p = 2 (направление магнитных силовых линий определяем с помощью правила буравчика). Оставив направление тока тем же, изменим несколько схему соединения обмотки, подключив конец первой секции 1к к концу второй 2к (рис. 1б). Из рис. 1б следует, что в этом случае статорная обмотка образует магнитное поле с числом пар полюсов, вдвое меньшим по сравнению с полем рис. 1а.
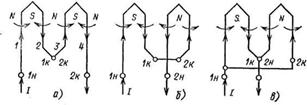
Рассмотрим схемы соединения статора 'и механические характеристики АД для этих случаев.
Треугольник — двойная звезда. Для получения большего числа пар полюсов р^ секции каждой фазы статора включены в треугольник согласно, т. е. так, как это показано на рис. 2а, где А1н и A2н — начала соответственно первой и второй секций фазы A; А1к и A2к — их концы. Обозначения для выводов секций фаз В и С, схемы включения которых аналогичны схемам фазы A, опущены. Соединение секций по схеме рис.2 б, как отмечалось выше, вызовет уменьшение в 2 раза числа пар полюсов АД.
Схема рис. 2б, получила название двойной звезды.
Для получения общего вида механических характеристик определим допустимую мощность АД при включении его статора по схемам рис. 2, а и б. Учитывая, что допустимый ток в секции обмотки статора I1доп = I1ном остается неизменным при переключении числа пар полюсов, допустимую первичную мощность определим:
для схемы треугольник (рис. 2, а)
 для схемы двойная звезда (рис. 2, б)
для схемы двойная звезда (рис. 2, б)

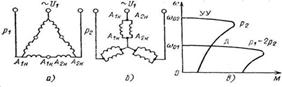
Рис. 2. Соединение обмоток статора в треугольник (а), двойную звезду (б) и механические характеристики при схемах треугольник — двойная звезда (Д—УУ) (в)
Из полученных выражений следует, что при cos φ1д ≈ cos φ1уу допустимая мощность АД остается практически неизменной. Поэтому при увеличении вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу АД увеличивается примерно в 2 раза.
Дата добавления: 2018-02-15; просмотров: 1033; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!