Перечислите основные параметры, по которым производится выбор аппаратов управления электроприводом.
Выбор выключателей может производиться по одноразовой предельной коммутационной способности.
Защитные характеристики комбинированных расцепителей автоматических выключателей A3100. КЗ выключатели выбираются так, чтобы значение предельной коммутационной способности, электродинамической и термической стойкости выключателей были не менее соответствующих значений параметров КЗ в месте их установки.
Допускается выбор аппарата защиты по величине его одноразовой предельной коммутационной способности ( ОПКС), т.е. наибольшей величине тока к. При отсутствии иных заводских данных ОПКС для всех величин расцепителей, встраиваемых в данный выключатель, может быть принята равной предельной коммутационной способности выключателя с наибольшим из его расцепителей. В нулевых и нейтральных проводниках двухпроводных ответвлений от этажных щитков на лестничных клетках жилых зданий установка предохранителей не требуется. Установка плавких предохранителей в нулевых и нейтральных проводниках трех-четырехпроводных цепей, а также в нулевых проводниках двухпроводных цепей в местах, где требуется заземление, запрещается.
Термическая и динамическая устойчивость автомата определяются его предельной коммутационной способностью
Последовательность этапов выбора электрической машины к электроприводу по мощности.
Перечислите способы ограничения пусковых токов асинхронного электродвигателя в приводе.
- Прямое включениеасинхронного двигателя в сеть
- Включение двигателя при пониженном напряжении питающей сети позволяет уменьшить пусковой ток, потребляемый двигателем
- Введение сопротивления в цепь роторапозволяет, с одной стороны. ограничить пусковой ток двигателя, а с другой стороны — повысить пусковой момент.
- при последовательном включении индуктивного сопротивления
- при включении двигателя через автотрансформатор.
Перечислите способы регулирования скорости ДПТ независимого или параллельного возбуждения.
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
1) Рассмотрим первый способ регулирования
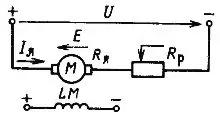
Рис. 1. Схема включения двигателя постоянного тока независимого возбуждения

Рис. 2. Механические характеристики двигателя постоянного тока при различных сопротивлениях цепи якоря (а) и напряжениях (б)
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
По этой причине диапазон регулирования скорости ограничен (D= 2 - З).
Недостаткомявляется наличие значительных потерь мощности при регулировании,
Достоинствомпростота и надежность схемы управления.
2) При втором способе регулирование осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
Диапазон регулирования скорости для данного способа D = 2 - 4.
Механические характеристики для различных значений потока двигателя приведены на рис. 2, а и 2, б, из которых видно, что характеристики в пределах номинального тока имеют высокую степень жесткости.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Преимуществами являются его простота и высокая экономичность.
3) Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки.
Диапазон регулирования равен 10 и может быть расширен за счет специальных схем управления.
При данном способе угловую скорость можно уменьшать и увеличивать относительно основной. Повышение скорости ограничено возможностями источника энергии с регулируемым напряжением и Uном двигателя.
Дата добавления: 2018-02-15; просмотров: 1018; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!