Алгоритм решения задач статики
1. Выбирают систему отсчёта.
2. Выбирают тело, к которому приложена система уравновешивающихся сил.
3. Показывают все действующие на тело активные нагрузки.
4. Согласно аксиоме связей действие связей на тело заменяют соответствующими реакциями связей.
5. К полученной системе сил применяют уравнения равновесия, соответствующие этой системе сил.
6. Из уравнений равновесия определяют неизвестные величины.
Пример решения задачи
На плоскую сходящуюся систему сил
Два стержня АС и ВС соединены шарнирно в узле С, к которому через блок D подвешен груз 1 весом 12 Н (рис. 1.33).
Определить реакции стержней АС, ВС, если угол a = 60о.
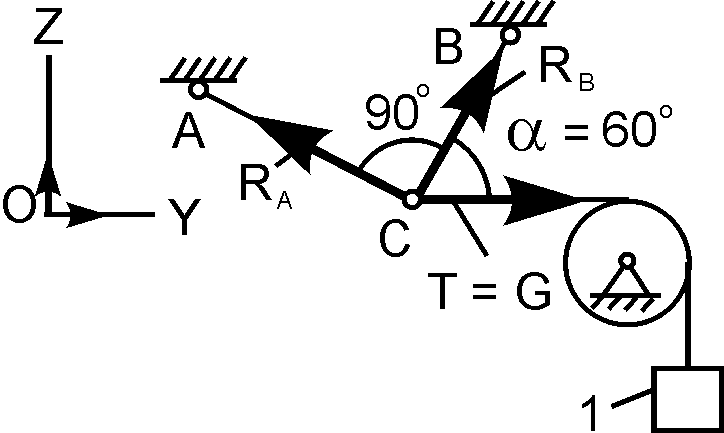 Рис. 1.33
Рис. 1.33
|
Решение. Решаем задачу по изложенному алгоритму.
1. Выбираем правую систему отсчёта OYZ.
2. Вырезаем узел С и рассмотрим его равновесие. Активных сил к узлу С не приложено. Следовательно, ΣFiE = 0.
3. От узла С отбрасываем невесомые стержни АС и ВС и показываем реакции RA и RB. Эти реакции направлены вдоль стержней. Условимся рассматривать их растянутыми. Отбрасываем нить и показываем на рисунке реакцию Т нити. Нить растянута. Модуль Т реакции Т равен весу G груза 1.
4. На узел С действует плоская система сходящихся реакций связей. Поскольку ΣFiE = 0, то геометрическое условие равновесия приобретает вид Σ RiE = RA + RB + T = 0. Аналитические условия равновесия выражаются двумя уравнениями:
Σ  = 0 = – RA·sin(a) + RB·cos(a) + T = 0; (1)
= 0 = – RA·sin(a) + RB·cos(a) + T = 0; (1)
|
|
|
Σ  = 0 = RA·cos(a) + RB·sin(a) = 0. (2)
= 0 = RA·cos(a) + RB·sin(a) = 0. (2)
5. Из уравнения (2) определим RA = – RB·  = – RB·tg(a). При подстановке RA в уравнение (1) имеем
= – RB·tg(a). При подстановке RA в уравнение (1) имеем
RB·tg(a)·sin(a) + RB·cos(a) + T = 0.
Откуда
RB = –  =
=
= –  = – 6 Н.
= – 6 Н.
Так как RB< 0, то стержень ВС сжат.
RA = – RB·tg(a) = – (– 6)·1,732 = 10, 392 Н.
Так как RA> 0, то стержень АС растянут.
Вопросы и задания для самоконтроля
1. Сформулировать определение термина «проекция силы на ось».
2. Записать формулы для определения проекций силы F на координатные оси декартовой системы отсчёта OXYZ.
3. Записать формулу для определения силы F через компоненты этой силы в декартовой системе отсчёта OXYZ.
4. Записать формулы для определения направляющих косинусов силы в декартовой системе отсчёта OXYZ.
5. Записать формулы для определения проекций равнодействующей системы сходящихся сил в декартовой системе отсчёта OXYZ.
6. Записать формулу, выражающую геометрическое условие равновесия сходящейся системы сил.
7. Записать уравнения равновесия для пространственной системы сходящихся сил в декартовой системе отсчёта OXYZ.
8. Записать уравнения равновесия для плоской системы сходящихся сил в декартовой системе отсчёта OXYZ.
Пара сил
Пару сил в механике рассматривают как одно из основных понятий, наряду с понятием силы.
|
|
|
Пара сил – система двух параллельных, противоположно направленных и равных по модулю сил, не лежащих на одной прямой.
Плоскость действия пары сил – плоскость, в которой находятся линии действия сил.
Плечо пары сил – кратчайшее расстояние (длина перпендикуляра) между линиями действия сил, составляющих пару сил.
На рис. 1.34 изображена пара сил, плоскость действия которой лежит в плоскости OXY системы отсчёта OXY.
Силы F1, F2 образуют пару сил. F1 = F2; F1 = – F2. Однако силы пары не уравновешиваются, так как они направлены не по одной прямой. Пара сил стремится произвести вращение тела, к которому она приложена. Действие пары сил на тело характеризуется её моментом.
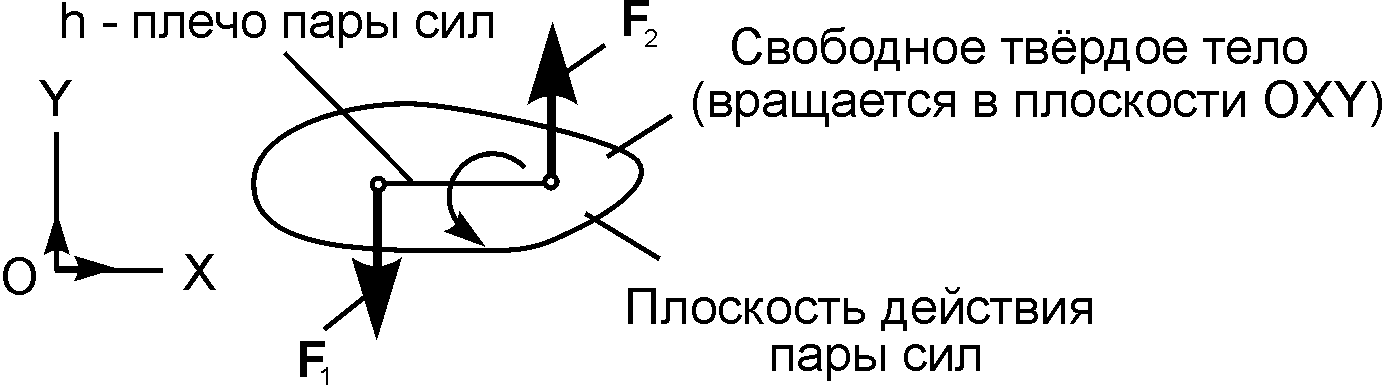 Рис. 1.34
Рис. 1.34
|
Для количественной характеристики действия пары сил на тело и указания направления, в котором пара сил стремится вращать тело, вводится понятие алгебраического момента пары сил.
Алгебраический момент пары сил – величина, равная взятому с соответствующим знаком произведению модуля одной из сил на её плечо.
M = ± F1·h = ± F2·h.
Алгебраический момент пары сил считают положительным, если пара сил стремится повернуть тело по часовой стрелке, и отрицательным, если против часовой стрелки. В системе СИ момент пары сил измеряется в Н·м.
|
|
|
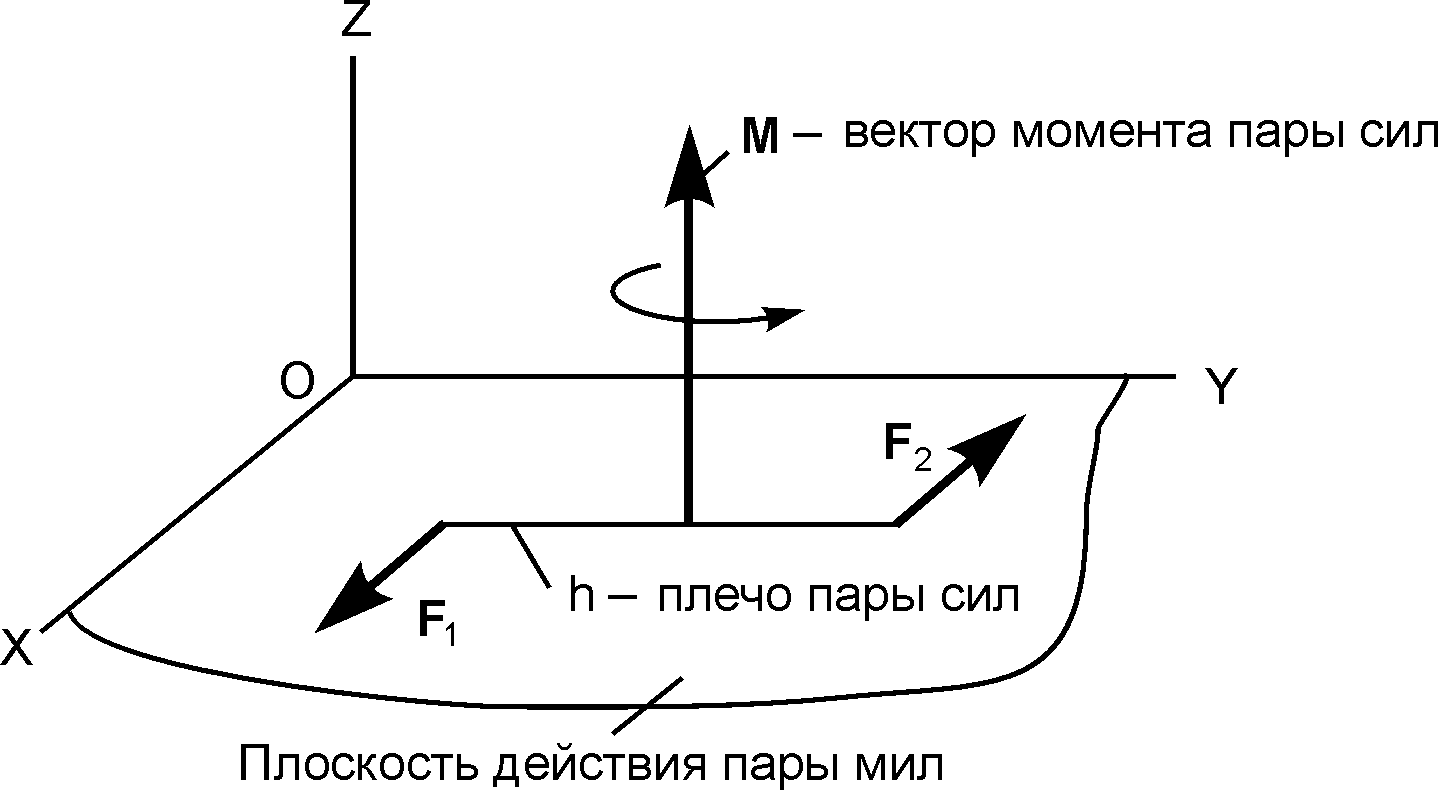 Рис. 1.35
Рис. 1.35
|
На рис. 1. 35 изображена пара сил (F1, F2), линии действия которых лежат в плоскости OXY.
Момент пары сил – векторная мера механического действия пары сил, равная моменту одной из сил пары относительно точки приложения другой силы.
Момент пары сил изображается вектором М. Вектор момента М пары сил (F1, F2) направлен перпендикулярно к плоскости действия пары сил в сторону, откуда видно пару сил, стремящуюся вращать плоскость её действия в сторону, противоположную вращению часовой стрелки. Согласно определению (см. рис. 1.35), M ^j, M ^i, M = F1×h = F2·h. Таким образом, пара сил полностью характеризуется её моментом M.
Теорема. Пары сил, лежащие в одной плоскости, эквивалентны, если их алгебраические моменты численно равны и одинаковы по знаку.
Доказательство этой теоремы несложно и здесь оно не приводится.
Следствия из теоремы(свойства пар):
1. Пару сил, не изменяя её действия на тело, можно как угодно поворачивать и переносить в любое место плоскости её действия.
2. У пары сил можно изменять плечо и модуль силы, сохраняя при этом алгебраический момент пары и плоскость действия.
|
|
|
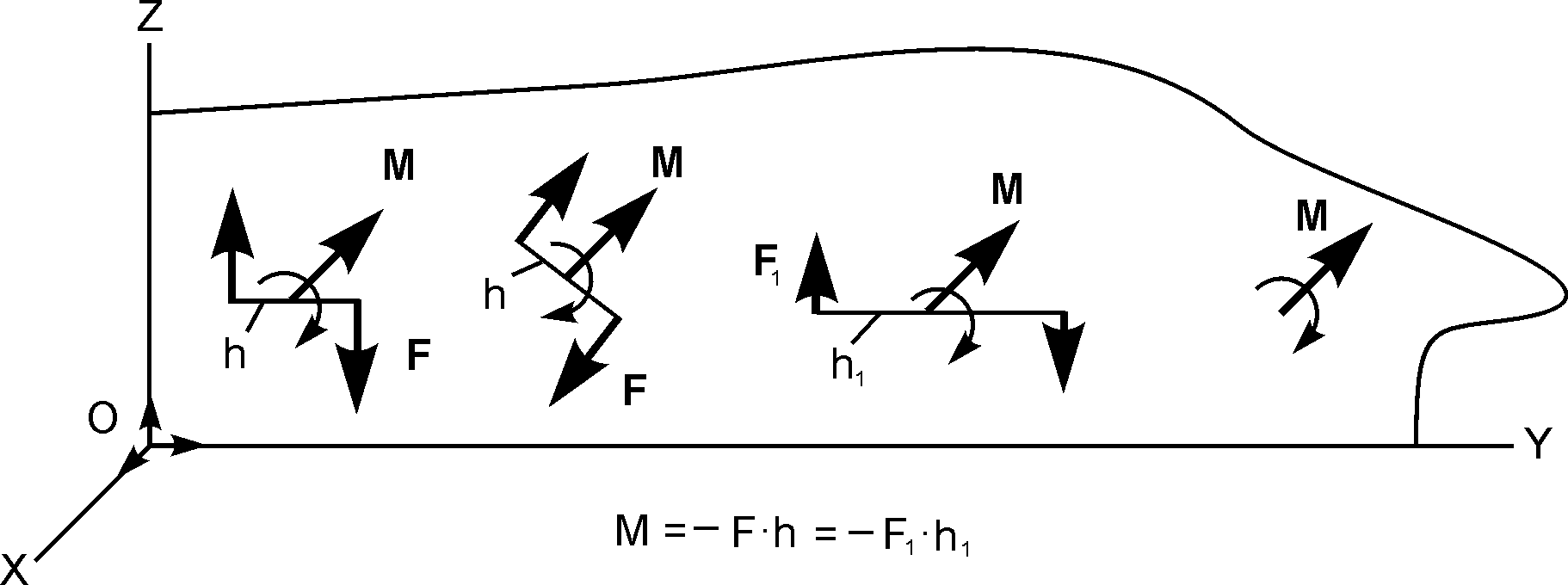 Рис. 1.36
Рис. 1.36
|
Суть теоремы и её следствий иллюстрируется рис. 1.36, на котором приведены пары сил с эквивалентными алгебраическими и векторными моментами. Плоскости действия пар сил совпадают с плоскостью YOZ.
Теорема. Пары сил в пространстве эквивалентны, если их моменты геометрически равны.
Доказательство этой теоремы также достаточно просто и здесь не приведено.
Из теорем о парах сил следует вывод: не изменяя действия пары сил на тело, пару сил можно переносить в любую плоскость, параллельную плоскости её действия, а также изменять её силу и плечо, сохраняя неизменными модуль и направление её момента.
Таким образом, вектор момента пары сил можно переносить в любую точку, то есть момент пары сил является свободным вектором.
Вектор момента пары сил определяет три элемента: положение плоскости действия пары; направление вращения; числовое значение (модуль) момента.
Отметим аналогию: если точку приложения вектора силы можно помещать где угодно на линии действия этой силы (скользящий вектор), то векторный момент пары сил можно приложить в любой точке тела (свободный вектор).
Сложение пар сил
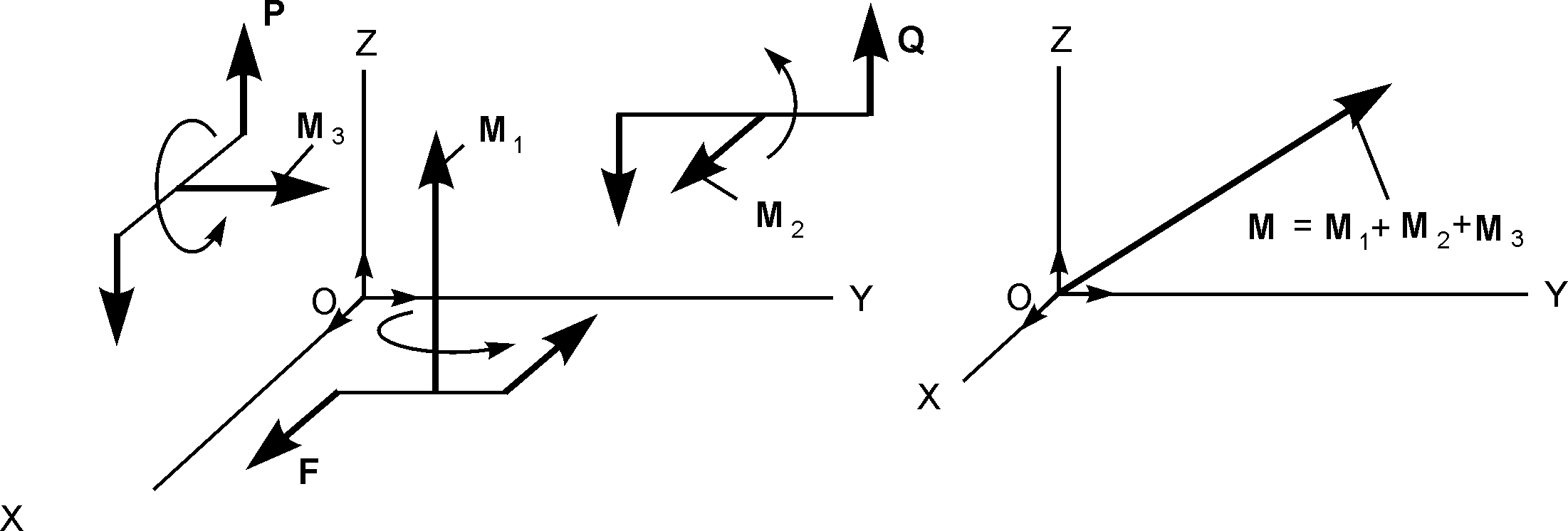 Рис. 1.37
Рис. 1.37
|
Пусть заданы три пары сил, плоскостями действия которых являются плоскости OXY, OXZ, OYZ (рис. 1. 37).
Векторные моменты этих пар сил обозначим М1, М2, М3. Так как эти векторы свободные, то переместив их в начало системы отсчёта OXYZ, получим систему векторов, приложенных в одной точке. Сложив графически эти векторы, получим один вектор М = М1 + М2 + М3.
Если таких векторов много, то в общем случае имеем M = Σ Mi (см. рис. 1.37).
Векторный момент пары сил, эквивалентный данной системе пар сил в пространстве, равен сумме векторных моментов заданных пар сил.
Условия равновесия пар сил
Теорема. Для равновесия пар сил, действующих на тело, необходимо и достаточно, чтобы величина векторного момента эквивалентной пары сил равнялась нулю или векторный многоугольник, построенный на векторных моментах заданных пар сил, был замкнут:
M = Σ Mi = 0.
В аналитической форме условия равновесия пар сил в пространстве выражаются системой уравнений:
MOX = Σ MiOХ = 0; MOY = Σ MiOY = 0; MOZ = Σ MiOZ = 0,
где MOX, MOY, MOZ – проекции векторного момента М эквивалентной пары сил на координатные оси OX, OY, OZ; Σ MiOХ; Σ MiOY; Σ MiOZ – суммы проекций векторных моментов Mi на координатные оси.
Теорема. Для равновесия пар сил, приложенных к телу, необходимо и достаточно, чтобы алгебраические суммы проекций векторных моментов пар сил на каждую координатную ось равнялись нулю.
В общем случае пару сил можно уравновесить только парой сил и нельзя уравновесить одной силой.
1.12.
Дата добавления: 2020-04-25; просмотров: 231; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!