Билет 20. Теорема об изменении кинетического момента.ДУ вращательного движения твёрдого тела вокруг неподвижной оси.
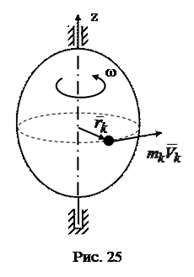
 - кинематические моменты
- кинематические моменты

Теорема об изменении кинетического момента
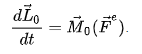 - относительно центра
- относительно центра
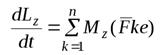 - относительно оси
- относительно оси
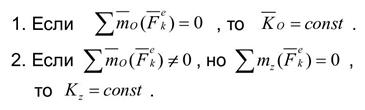
Следствия
Если главный момент внешних сил относительно некоторой оси равен нулю, то кинетический момент системы относительно этой оси не изменяется.
 K равносильно L(кин момент) !!!!
K равносильно L(кин момент) !!!!
ДУ вращательного движения тв тела вокруг неподвижной оси


Билет 21.Кинетическая энергия системы. Теорема Кёнига.
*Кинетическая энергия материальной точки — скалярная положительная величина, равная половине произведения массы точки на квадрат ее скорости, т. е.  .
.
*Кинетическая энергия механической системы — арифметическая сумма кинетических энергий всех материальных точек этой системы  .
.
*Кинетическая энергия системы, состоящей из п связанных между собой тел:
 .
.
1)Поступательное движение.
При поступательном движении тела 
 .
.
2)Вращение тела вокруг неподвижной оси .
 .
.
 ,
,
где  - момент инерции тела относительно оси вращения.
- момент инерции тела относительно оси вращения.
3)Плоскопараллельное движение.

*Теорема Кенига. Кинетическая энергия механической системы в общем случае ее движения равна сумме кинетической энергии движения системы вместе с центром масс и кинетической энергии системы при ее движении относительно центра масс:

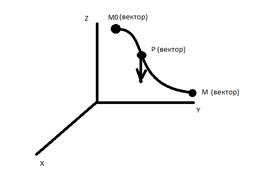
Билет 22. Работа и мощность силы. Теорема о равнодействующей сил приложенных в одной точке. Работа и мощность силы, приложенной к вращающемуся телу. Примеры вычисления работы. Теорема об изменении кинетической энергии системы.
|
|
|
Мощностью силы называется алгебраическая величина, равная скалярному произведению вектора силы на вектор скорости точки приложения силы: N = F * v * cosα
Элементарной работой силы называется скалярная величина dA, равная произведению мощности N силы на элементарный промежуток времени dt. dA = FdS * cosα
Частные случаи:
1)Работа силы тяжести.
A = gM ( z 0 c - z 1 c )
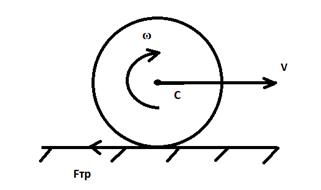
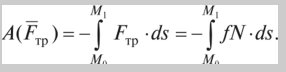
2)Работа силы трения скольжения.
3)Работа силы упругости.
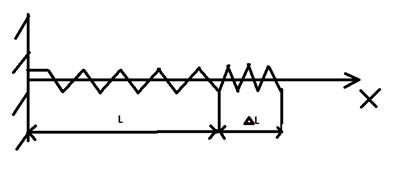 A ( Fy )=( c /2)( x 2 0 - x 2 1 )
A ( Fy )=( c /2)( x 2 0 - x 2 1 )
Работа и мощность силы, приложенной к вращающемуся телу
 A = ∫(от φ до φ0) mz ( F ) d φ
A = ∫(от φ до φ0) mz ( F ) d φ
dA ( F ) = mz ( F ) d φ
N = dA / dt = mz ( F (вектор))= d φ/ dt = mz ( F / ω )
Теорема об изменении кинетической энергии системы
T = mv2/2
1)Поступательное
Т=mvc2/2
2) Вращательное
T = ω2Iz/2
3) C ложное (поступательное с центром масс + вращательное ЦМ)
а) Т = (mvc2/2) + T’
б) T = (mvc2/2) + (Izω2/2)
Теорема о равнодействующей сил приложенных в одной точке.
 ....+
....+ 
 =
=  ....+ )
....+ )  =
=  +
+  +
+ 


Билет 23.Потенциальное силовое поле. Потенциальная энергия. Закон сохранения полной механической энергии.
Силовым полем называется часть пространства, в котором на каждой помещенной туда точке действует сила, зависящая только от координат этой точки.
|
|
|
Силовое поле называют потенциальным, если существует функция координат, называется силовой функцией, такая, что вектор силы является градиентом этой функции
U(x,y,z) – силовая функция, F(r), F(x,y,z) (F, r – векторы)
F=gradU (F- вектор)
Fx=  ; Fy=
; Fy=  ; Fz=
; Fz= 
 (Пометка: первая дробь Fx, вторая дробь Fy)
(Пометка: первая дробь Fx, вторая дробь Fy)
 (Пометка: первая дробь Fy, вторая дробь Fz)
(Пометка: первая дробь Fy, вторая дробь Fz)
 (Пометка: первая дробь Fx, вторая дробь Fz)
(Пометка: первая дробь Fx, вторая дробь Fz)
dA=Fxdx+Fydy+Fzdz= dx+ dy+ dz=dU => dA=dU
A12=  =
=  =U2-U1
=U2-U1
-Работа силы потенциального силового поля равна разности значений силовой функции в конечном и начальном положении при движении.
-Работа не зависит от вида и длины перемещения.
-Работа на замкнутом пути равна нулю.
-Потенциальная энергия материальной точки в данном месте потенциального силового поля – работа, которую может совершить силовое поле, перемещая точку из данного положения в некоторое нулевое положение.
П=A10=U0-U1=-U1=-U
dП=-dU => dП=-dA => dA=-dП
Fx=  ; Fy=
; Fy=  ; Fz=
; Fz= 
= 
A12=П1-П2 => T2-T1=П1-П2 => Т1+П1=Т2+П2=Е
Е=П+Т=const – закон сохранения полной механической энергии в потенциальном силовом поле
Билет 24.Принцип Даламбера.
Принцип Даламбера звучит следующим образом: если к воздействующей на тело активной силе прикладывается дополнительная сила инерции, тело будет пребывать в равновесном состоянии. При этом суммарное значение всех действующих в системе сил, дополненное вектором инерции, получит нулевое значение.
|
|
|
Принцип Даламбера для материальной точки

Принцип Даламбера для механической системы
Геометрическая сумма главных векторов внешних сил, действующих на систему, и сил инерции всех точек системы, а также геометрическая сумма главных моментов этих сил относительно некоторого центра для несвободной механической системы в любой момент времени равны нулю, т.е.
F-внешние силы
R-реакции связей
Ф-силы инерции
Дата добавления: 2020-01-07; просмотров: 133; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!