Билет 14. Мгновенный центр скоростей плоской фигуры. Свойства МЦС.
МЦС-точка, неизменно связанная с телом, в которой в данную секунду абсолютная скорость равна 0.
Чтоб найти МЦС плоской фигуры в данный момент t нужно скорость некоторой точки А из этой плоской фигуры повернуть на 90 в сторону вращения и на полученном луче отложить отрезок AP=Ua/𝛡
P-плоскость
При плоском движении скорость любой точки равна скорости вращения этой точки вокруг МЦС.
Свойства:
1. МЦС находится на пересечении перпендикулярно к скоростям любых двух точек плоской фигуры
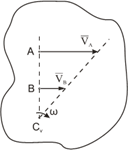
2. Uв=𝛚*BCv (Cv-центр скоростей) , Ua=𝛚ACv
3. 𝛚=Uв/BCv 𝛚=Ua/ACv
4. Ua/Uв=ACv/BCv
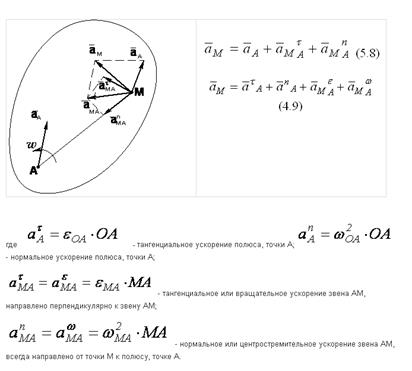
Билет 15. Ускорение точек плоской фигуры

Билет 16. Динамика точки. Первая и вторая задачи динамики. ДУ относительного движения точки.
Динамика – раздел теоретической механики, в котором изучается движение тел под действием сил.
Задачи динамики:
1) Зная закон движения точки, определить действующую на нее силу (первая задача динамики)
2) зная действующие на точку силы, определить закон движения точки (вторая, или основная, задача динамики)
ДУ относительного движения точки:
Для абсолютного движения основной закон динамики имеет вид:
Из кинематики известно: 

Введем обозначения:

Билет 17. Динамика системы. Основные понятия. Внешние и внутренние силы.
Основные понятия:
- масса системы : M= 
- центр масс : xc=  ; yc=
; yc=  ; zc=
; zc=  – координаты центра масс
– координаты центра масс
|
|
|
rc= 
-момент инерции (относительно центра и оси) : Ic=  ; Iz=
; Iz= 
- кинетическая энергия : T=(m*U^2)/2 - для точки
- количество движения : q=m*U (для точки) (q и U – векторы);
Q=  =
=  – (для системы) (Q, q и U – векторы) – момент количества движения
– (для системы) (Q, q и U – векторы) – момент количества движения
l0=r x q = r x m*U- относительно центра О (L0, r, q, U – векторы)
lz=q*h=m*U*h – относительно оси Z
lz=lo*cosα
Lo=  =
=  (Lo, lo, rk, Uk – векторы)
(Lo, lo, rk, Uk – векторы)
Lz= = 
Для системы материальных точек силы называются внешними, если действуют на точки системы со стороны точек, не входящих в систему
( Fe ) – внешние
( Fi ) – внутренние
Ri =0 ( Ri , Mio, Fi , Fe , Mio(Fik), Miz(Fiz) – векторы)
Ri = =  , где F=Fi (внутренние)
, где F=Fi (внутренние)
Mio=0 => Mio=  , где M(F)=Mio(Fik)
, где M(F)=Mio(Fik)
Miz=0 => Mio= , где M(F)=Miz(Fiz)
Билет 18.Теоремы
Теорема об изм. кол-ва движ. сист. (дифер. Вид)
(интегральный вид)
(элементарный импульс силы)
Импульс силы
Теорема о движении центра масс
Билет 19. Теория моментов инерции. Теорема Гюйгенса-Штейнера. Примеры вычислений моментов инерций.
1) Моментом инерции тела относительно данной оси Oz называется скалярная величина, равная сумме произведений масс всех точек тела на квадраты их расстояний от оси: 


Радиус инерции относительно оси – это расстояние от оси до такой точки, что если в ней сосредоточить всю массу системы, то момент инерции этой точки и этой системы относительно оси будут равны.
|
|
|
2) Теорема Гюйгенса-Штейнера: Момент инерции системы относительно оси равен моменту инерции относительно оси, ей параллельной, проходящей через центр масс, сложенному с произведением массы всей систем на квадрат расстояния между осями:
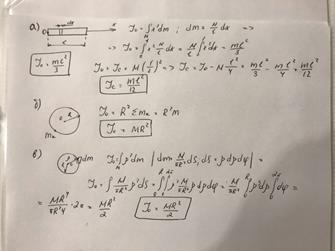
3) а) Тонкий однородный стержень
б) Кольцо (полый цилиндр)
в) Сплошной цилиндр
Дата добавления: 2020-01-07; просмотров: 155; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!