Принцип возможных перемещений
Принцип возможных перемещений устанавливает условия равновесия механических систем. Под равновесием механической системы традиционно понимают состояние ее покоя по отношению к выбранной инерциальной системе отсчета.
Рассмотрим механическую систему, состоящую из  материальных точек. Для ее равновесия необходимо и достаточно, чтобы суммы всех сил, действующих на каждую точку системы, и скорости всех точек в начальный момент времени равнялись нулю:
материальных точек. Для ее равновесия необходимо и достаточно, чтобы суммы всех сил, действующих на каждую точку системы, и скорости всех точек в начальный момент времени равнялись нулю:
 (7.1)
(7.1)
где  – равнодействующая всех активных сил, действующих на точку с номером
– равнодействующая всех активных сил, действующих на точку с номером  ;
;
 – равнодействующая всех сил реакций связей, наложенных на точку с номером
– равнодействующая всех сил реакций связей, наложенных на точку с номером  .
.
Для равновесия механической системы с идеальными удерживающими стационарными связями необходимо и достаточно, чтобы сумма элементарных работ всех приложенных к системе активных сил на любом возможном перемещении системы равнялась нулю и скорости всех точек в начальный момент времени равнялись нулю:
 (7.2)
(7.2)
Сформулированное утверждение называют принципом возможных перемещений. Необходимость. Пусть механическая система находится в равновесии. Следовательно, выполняются условия (7.1). Из данного положения дадим системе возможное перемещение. Умножим каждое из уравнений (7.1) скалярно на соответствующее точке возможное перемещение  и сложим все полученные уравнения:
и сложим все полученные уравнения:
|
|
|
 (7.3)
(7.3)
По условию связи идеальные, следовательно, справедливо равенство (6.7). Из (6.7) и (7.3) получаем (7.2).
Достаточность. Приложим к точкам покоящейся механической системы систему сил, удовлетворяющих равенству (7.2) и, следовательно, поскольку связи идеальные (6.7), равенству
 (7.4)
(7.4)
Покажем, что механическая система останется в покое. Допустим противное – система под действием приложенных сил пришла в движение, т.е. ее точки получили ускорения  . Эти ускорения должны быть направлены по касательным к траекториям точек, поскольку скорости равны нулю и нормальные составляющие ускорений отсутствуют. Таким образом, действительные перемещения точек пропорциональны их ускорениям. По условию связи стационарные и, следовательно, среди возможных перемещений системы найдется такое, которое совпадает с действительным. Возьмем в качестве возможного перемещения систему векторов, пропорциональных ускорениям точек
. Эти ускорения должны быть направлены по касательным к траекториям точек, поскольку скорости равны нулю и нормальные составляющие ускорений отсутствуют. Таким образом, действительные перемещения точек пропорциональны их ускорениям. По условию связи стационарные и, следовательно, среди возможных перемещений системы найдется такое, которое совпадает с действительным. Возьмем в качестве возможного перемещения систему векторов, пропорциональных ускорениям точек  . Равенство (7.4) примет вид:
. Равенство (7.4) примет вид:  или, учитывая, что для каждой точки справедлив второй закон Ньютона,
или, учитывая, что для каждой точки справедлив второй закон Ньютона, 
|
|
|
Это равенство может иметь место только в том случае, если ускорения всех точек равны нулю  Следовательно, механическая система после приложения активных сил останется в покое.
Следовательно, механическая система после приложения активных сил останется в покое.
Заметим, что если вместо возможных перемещений использовать пропорциональные им возможные скорости (что позволяет в полной мере использовать при решении задач кинематические методы), то условия равновесия записываются в виде:
 (7.5)
(7.5)
т.е.
для равновесия механической системы с идеальными, удерживающими, стационарными связями необходимо и достаточно, чтобы сумма мощностей всех приложенных к системе активных сил при любых возможных скоростях ее точек равнялась нулю и скорости всех точек в начальный момент времени равнялись нулю.
Пример 1
Определить зависимость между модулями сил  и
и  в клиновом прессе, если сила приложена к концу рукоятки длины
в клиновом прессе, если сила приложена к концу рукоятки длины  перпендикулярно плоскости, содержащей рукоятку и ось винта (Рис.7.8). Шаг винта равен
перпендикулярно плоскости, содержащей рукоятку и ось винта (Рис.7.8). Шаг винта равен  . Угол при вершине клина
. Угол при вершине клина  .
.
Дадим системе возможное перемещение: пусть  – угол поворота рукоятки;
– угол поворота рукоятки;  – перемещение точки
– перемещение точки  ;
;  – горизонтальное перемещение клина;
– горизонтальное перемещение клина;  – вертикальное перемещение точки
– вертикальное перемещение точки  .
.
|
|
|
|
| Рис.7.8 |
При исследовании условий равновесия механизмов в зависимости от конкретной задачи, исходя из соображений удобства, можно использовать как возможные скорости, так и возможные перемещения. Для сравнения в этом первом разбираемом примере рассмотрим и возможные перемещения, и возможные скорости.
Условия равновесия системы можно записать в виде (7.2): 
Возможные перемещения связаны между собой соотношениями
 . Отсюда:
. Отсюда: 
Теперь условия равновесия записываются в виде: 
Отсюда: 
Пример 2
Полиспаст состоит из неподвижного блока и  подвижных блоков (Рис.7.9). Определить в случае равновесия отношение веса
подвижных блоков (Рис.7.9). Определить в случае равновесия отношение веса  поднимаемого груза к величине силы
поднимаемого груза к величине силы  , приложенной к свободному концу троса.
, приложенной к свободному концу троса.

|
| Рис.7.9 |
Условие равновесия (7.5) имеет вид 
Рассмотрим первый из подвижных блоков. Точка  – мгновенный центр скоростей блока. Возможная скорость точки
– мгновенный центр скоростей блока. Возможная скорость точки  численно равна возможной скорости точки . Следовательно,
численно равна возможной скорости точки . Следовательно,  Скорость центра каждого последующего подвижного блока равна половине скорости центра предыдущего подвижного блока. Таким образом,
Скорость центра каждого последующего подвижного блока равна половине скорости центра предыдущего подвижного блока. Таким образом, 
|
|
|
Подставляя полученный результат в условие равновесия, имеем:

Общее уравнение динамики
Рассмотрим механическую систему, состоящую из  материальных точек, на которую наложены идеальные удерживающие связи. Уравнения движения точек имеют вид:
материальных точек, на которую наложены идеальные удерживающие связи. Уравнения движения точек имеют вид:

где
 – равнодействующая всех активных сил, действующих на точку с номером ;
– равнодействующая всех активных сил, действующих на точку с номером ;
– равнодействующая реакций связей, наложенных на точку с номером .
При фиксированном времени дадим точкам системы возможные перемещения. Умножим каждое из уравнений движения скалярно на соответствующее возможное перемещение и сложим все полученные уравнения:

Поскольку по условию связи идеальные (6.7), последняя сумма равна нулю и, следовательно,
 (7.6)
(7.6)
Уравнение (7.6) называется общим уравнением динамики.
При использовании общего уравнения динамики удобно вводить в рассмотрение силы инерции. В этом случае уравнение (7.6) принимает вид:
 (7.7)
(7.7)
Равенство (7.7) составляет содержание так называемого принципа Лагранжа–Даламбера:
в каждый момент времени для механической системы с идеальными удерживающими связями сумма работ всех активных сил и всех сил инерции на любом возможном перемещении системы равна нулю.
Пример
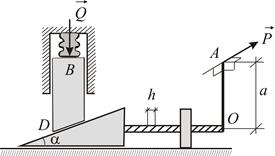
Призма массы  может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки. Конец троса прикреплен к оси катка, который катится без скольжения по боковой поверхности призмы. Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы
может скользить по идеально гладкой горизонтальной поверхности. В вершине призмы закреплена ось барабана лебедки. Конец троса прикреплен к оси катка, который катится без скольжения по боковой поверхности призмы. Барабан лебедки и каток — сплошные однородные цилиндры одинаковой массы  и одинакового радиуса
и одинакового радиуса  . К барабану лебедки приложен постоянный вращающий момент
. К барабану лебедки приложен постоянный вращающий момент  . Составить дифференциальные уравнения движения системы.
. Составить дифференциальные уравнения движения системы.
Силовая и кинематическая схемы представлены на Рис.7.10. Общее уравнение динамики в рассматриваемом случае имеет вид:


|
| Рис.7.10 |
Система имеет две степени свободы. В качестве независимых координат примем координату призмы  и относительную координату оси катка
и относительную координату оси катка  . Кинематические условия, налагаемые связями, имеют вид:
. Кинематические условия, налагаемые связями, имеют вид: 
Отсюда:  и
и 
Учитывая, что



получаем общее уравнение динамики в виде:


Поскольку возможные перемещения  и
и  могут принимать любые значения и не зависят друг от друга, общее уравнение динамики распадается на систему двух дифференциальных уравнений относительно координат и
могут принимать любые значения и не зависят друг от друга, общее уравнение динамики распадается на систему двух дифференциальных уравнений относительно координат и  :
:


ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
- В чём состоит принцип возможных перемещений?
- Как выглядит общее уравнение динамики?
ЛЕКЦИЯ 8 (16)
Дата добавления: 2019-09-02; просмотров: 302; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!