Геометрические параметры кулачковых механизмов
У механизмов с толкателем основными геометрическими параметрами являются:
1. RO – радиус базовой окружности кулачка, это минимальное расстояние от центра вращения кулачка до его центрового профиля.
2. e – эксцентриситет, т.е. смещение оси толкателя от оси, проходящей через центр вращения кулачка. Эксцентриситет величина алгебраическая, т.е. имеющая знак, указывающий на направление смещения с учетом направления вращения кулачка. На рис. 3.1бв,д,з с учетом того, что кулачок вращается против часовой стрелки, эксцентриситет показан положительным. Если же кулачок вращается по часовой стрелке, то положительным будет смещение в противоположную сторону. У механизмов с плоским толкателем (рис. 3.1д) эксцентриситет является чисто конструктивным параметром.
Механизмы с коромыслом. У механизмов с коромыслом и роликом (рис. 3.1а) основными геометрическими параметрами являются, или пара:
1. RO – радиус базовой окружности кулачка.
2. L – межцентровое расстояние, от центра вращения кулачка до центра качания коромысла.
Или пара:
1. RO – радиус базовой окружности кулачка.
2. lК – длина коромысла.
Такая неоднозначность объясняется тем, что если одна из величинL или lк фиксирована, то другая определяется однозначно.
У механизмов с коромыслом и роликом тоже может быть эксцентриситет e, показанный на рис. 3.1а, но для них основным геометрическим параметром он не является.
|
|
|
У механизмов с плоским коромыслом (рис. 3.1г) основными геометрическими параметрами всегда являются:
1. RO – радиус базовой окружности кулачка.
2. L – межцентровое расстояние.
Билет №4
Что такое коромысло?
Вращающееся звено, совершающее полный оборот вокруг неподвижной оси, называют кривошипом, неполный оборот - коромыслом
Что такое кинематическая цепь?
кинематическая цепь – связная совокупность звеньев, образующих кинематические пары. Кинематические цепи в зависимости от расположения звеньев могут быть:
а) Плоские, т.е. такие, все движения звеньев которых происходят в одной или параллельных плоскостях (рис. 1.2а).
б) Пространственные (рис. 1.2б).
Кроме того, они могут быть:
а) Замкнутые (рис. 1.2а).
б) Разомкнутые (рис. 1.2б).
Как выделять структурные группы из состава механизма?
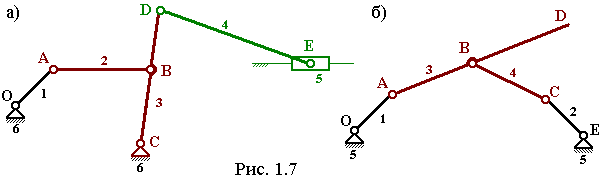
Структурный синтез механизмов с помощью структурных групп сводится к тому, что к входному механизму или к нескольким входным механизмам присоединяются структурные группы. При этом, поскольку число степеней свободы группы АссураW = 0, то её присоединение к механизму не меняет числа степеней свободы. На рис. 1.7 приведены примеры такого синтеза. На рис. 1.7а сформирован шестизвенный механизм 2-го класса 2-го порядка, структурно состоящий из входного кривошипа 1 и двух структурных групп: ABC и DE. Поскольку у входного механизма число степеней свободы W = 1, то и у всего механизма – тоже. На рис. 1.7б синтезирован пятизвенный механизм с числом степеней свободы W = 2. Здесь входные звенья – 1-е и 2-е, а ABC – структурная группа.
|
|
|
При таком синтезе созданный мехзанизм не будет иметь пассивных связей. Если при дальнейшей проработке они потребуются по соображениям прочности или жесткости, то они могут быть введены конструктивно.
Расчёт числа степеней свободы для плоского механизма
Число степеней свободы плоских механизмов вычисляется по формуле Чебышева:

(1.2)
где pН – количество низших, pВ – количество высших кинематических пар.
В плоских механизмах кинематические пары 5-го класса всегда низшие, а 4-го класса всегда высшие. Этим и объясняется второе равенство в формуле (1.2).
Дата добавления: 2018-06-01; просмотров: 662; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!