В чём заключается структурный синтез рычажного механизма?
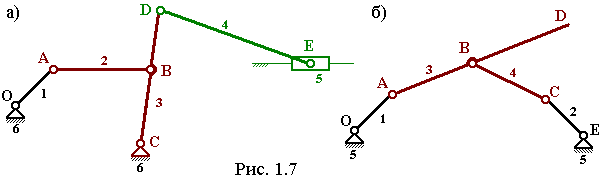
Структурный синтез механизмов с помощью структурных групп сводится к тому, что к входному механизму или к нескольким входным механизмам присоединяются структурные группы. При этом, поскольку число степеней свободы группы АссураW = 0, то её присоединение к механизму не меняет числа степеней свободы. На рис. 1.7 приведены примеры такого синтеза. На рис. 1.7а сформирован шестизвенный механизм 2-го класса 2-го порядка, структурно состоящий из входного кривошипа 1 и двух структурных групп: ABC и DE. Поскольку у входного механизма число степеней свободы W = 1, то и у всего механизма – тоже. На рис. 1.7б синтезирован пятизвенный механизм с числом степеней свободы W = 2. Здесь входные звенья – 1-е и 2-е, а ABC – структурная группа.
При таком синтезе созданный механизм не будет иметь пассивных связей. Если при дальнейшей проработке они потребуются по соображениям прочности или жесткости, то они могут быть введены конструктивно.
Передаточная функция в механизме

Пусть при кинематическом анализе кривошипно-ползунного механизма (рис. 2.18а) мы исследуем движение ползуна B. При движении от нижнего положения график его скорости будет иметь вид, показанный на рис. 2.18б.
У этой функции есть две характеристики: её форма и её размах vBm. Форма зависит от сочетания размеров механизма, то есть от его внутренних свойств. А размах – от величины угловой скорости входного кривошипа w1, то есть от внешнего сигнала. При решении очень многих задач, и не только в механике, желательно разделить – что зависит от внутренних свойств объекта, а что – от внешних факторов.
|
|
|
Скорость это первая производная от перемещения по времени:
vB = dxB/dt.
В этом выражении внутренние и внешние свойства перемешаны. Разделим их, расписав полную производную по времени через частные – по обобщённой координате и времени:

Теперь первый сомножитель SB’, названный передаточной функцией, содержит информацию о внутренних свойствах механизма, а второй w1 – о внешнем сигнале.
Физический смысл передаточной функции становится очевиден, если её записать так: SB’ = vB/w1, то есть это скорость ползуна при w1 = 1. Следовательно, для её построения достаточно произвести кинематический анализ механизма, например, методом векторных контуров при w1 = 1, e1 = 0.
Фазы работы кулачковых механизмов
Кулачковые механизмы могут реализовывать на выходном звене законы движения практически любой сложности. Но любой закон движения может быть представлен комбинацией следующих фаз:
1. Фаза удаления. Процесс перемещения выходного звена (толкателя или коромысла), когда точка контакта кулачка и толкателя удаляется от центра вращения кулачка.
|
|
|
2. Фаза возврата (приближения). Процесс перемещения выходного звена, когда точка контакта кулачка и толкателя приближается к центру вращения кулачка.
3. Фазы выстоя. Ситуация, когда при вращающемся кулачке точка контакта кулачка и толкателя неподвижна. При этом различают, фазу ближнего выстоя – когда точка контакта находится в самом ближнем положении к центру кулачка, фазу дальнего выстоя – когда точка контакта находится в самом дальнем положении от центра кулачка и фазы промежуточных выстоев. Фазы выстоя имеют место, когда точка контакта движется по участку профиля кулачка, имеющего форму дуги окружности, проведенной из центра вращения кулачка.
Суть метода планов при КА рычажного механизма
1. По исходно заданным кинематическим параметрам движения входного звена определяются параметры движения той его точки, в которой присоединяется первая структурная группа. Эти значения преобразуются в её систему координат.
2. Производятся расчеты для этой структурной группы и вычисляются параметры движения той точки её звена, в которой присоединяется следующая группа.
3. Эти значения преобразуются в систему координат следующей структурной группы, производится её расчет и т.д.
Дата добавления: 2018-06-01; просмотров: 379; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!