Расчёт числа степеней свободы для пространственного механизма
Ответы на вопросы по ТММ
Билет 1
Что такое звено?
Несколько жёстко скрепленных деталей могут составлять систему, которая движется как единое твердое тело
Что такое кривошип?
Вращающееся звено, совершающее полный оборот вокруг неподвижной оси, называют кривошипом
Структурная схема машины
В состав машины может входить один или несколько механизмов (кинематических цепей, то есть, совокупность звеньев, связанных между собой кинематическими парами)
Что такое структурная группа (группа Ассура)?
По определению структурной группой называется кинематическая цепь, которая будучи своими внешними кинематическими парами установлена на стойку имеет число степеней свободы W = 0
Замкнутые и разомкнутые кинематические цепи
Цепи могут быть замкнутыми, если каждое звено входит не менее чем в две кинематические пары, и незамкнутыми
Правила оформления структурных схем механизмов
Структурная схема кинематической цепи или механизма указывает только звенья и характер их взаимосвязи, т. е. вид кинематических пар
Выявление пассивных звеньев (связей) в механизме
Пассивная связь – это, как правило, звено, удаление которого из механизма не влияет на его кинематику, то есть с точки зрения кинематики оставшиеся звенья будут совершать те же движения
Последовательность работ при КА методом векторных контуров
Этот аналитический метод удобен для нахождения угловых кинематических параметров с помощью системы уравнений, полученных из условия замкнутости одного или нескольких векторных контуров, которые определяют положение звеньев механизма. Например, шарнирный четырехзвенник (рис. 2.8) можно представить всего одним векторным контуром 
 .
.
|
|
|

Рис. 2.8
Проецируя его на оси ОХ и OY неподвижной системы координат, получаем
 , ,
| (2.15) |
 . .
|
Величины l1, l2, l3, l4, и j1 считаем заданными. Тогда система (2.15) относительно j2 и j3 может быть решена, например, следующим образом. Записав
 ;
;
 ,
,
| или |  , ,
| (2.16) |
 , ,
|
где  и
и  .
.
Возведем уравнения (2.16) в квадрат и сложим, в результате получим

| или |  , ,
| (2.17) |
где  и
и  .
.
После возведения в квадрат обеих частей выражения (2.17) получаем следующее квадратное уравнение для определения угла j2:

(его решение для краткости не приводим).
Определив угол j2, находим j3, использовав любое из уравнений (2.16).
Угловые скорости ω2 и ω3 звеньев2 и3 найдутся после дифференцирования уравнений (2.15) по времени. Учитывая, что dj1/dt=ω1 (эта угловая скорость считается заданной), dj2/dt= ω2 и dj3/dt= ω3, а l4 = const, получаем систему
|
|
|

| (2.18) |

|
которую можно решить приемом вычитания одинакового известного угла j2 или j3 из всех углов, входящих в первое уравнение. Так, вычитая j3, получаем  откуда
откуда
| . |
| , |
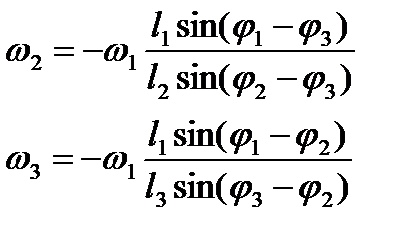
| , |
| . |

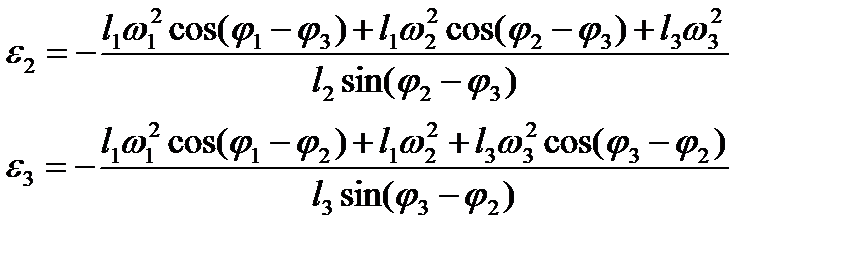
Используя тот же прием, что и для решения системы (2.18), находим
| . |
| , |
Расчёт числа степеней свободы для пространственного механизма
Число степеней свободы пространственных механизмов вычисляется по формуле Сомова-Малышева:
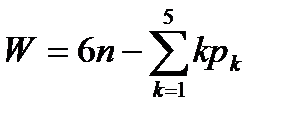
(1.1)
где n – количество подвижных звеньев в механизме, pk – количество кинематических пар k-го класса.
Дата добавления: 2018-06-01; просмотров: 710; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!