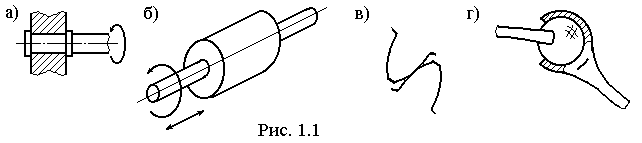
Примеры кинематических пар пятого класса
По характеру контакта звеньев в кинематической паре. По этой классификации кинематические пары делятся на:
а) Низшие – такие, контакт в которых происходит по поверхности.
б) Высшие – такие, контакт в которых происходит по линии или в точке.
Здесь необходимо уточнить, что при классификации кинематических пар приняты следующие допущения:
а) Форма контактирующих поверхностей идеальна.
б) В кинематических парах отсутствуют зазоры.
На рис. 1.1 представлены примеры. На рис 1.1а – кинематическая пара 5 класса, низшая. Она отнимает 5 степеней свободы, оставляя только одну – вращательную. Контакт между звеньями происходит по цилиндрической поверхности.
Билет №3
Что такое машина?
Машиной будем называть устройство, выполняющее механические движения для преобразования энергии, материалов или информации с целью замены или облегчения физического и умственного труда. В состав машины может входить один или несколько механизмов, а сами машины, в свою очередь, могут объединяться в сложные механические системы (машинные агрегаты, машины-автоматы, промышленные роботы и т. д.).
Что такое кулиса?
Вращающееся звено, совершающее полный оборот вокруг неподвижной оси, называют кривошипом, неполный оборот -коромыслом, а если оно в дополнение к одному из этих признаков образует еще поступательную пару с другим подвижным звеном, -кулисой
Назначение рычажных механизмов
|
|
|
Все механизмы с низшими парами, в том числе и рычажные, обладают высокой нагрузочной способностью, т. е. могут передавать большие усилия, поскольку контакт их звеньев осуществляется по некоторым поверхностям. Это достоинство сохраняется и в том случае, если в рассматриваемых механизмах некоторые низшие пары заменены кинематическими соединениями - шариковыми и роликовыми подшипниками или направляющими. Элементы кинематических пар рычажных механизмов обычно представляют собой поверхности вращения или являются плоскостными, поэтому они просты в изготовлении.
К недостаткам рычажных механизмов нужно отнести ограниченность возможных движений выходных звеньев из-за свойства обратимости низших кинематических пар и сложность метрического синтеза, т. е. определения размеров, при которых достигается требуемый закон движения. Несмотря на эти недостатки рычажные механизмы относятся к самым распространенным.
Что такое кинематическая пара?
Соединение двух соприкасающихся звеньев, которое допускает их относительное движение, называется кинематической парой (или просто парой). При этом каждое из звеньев имеет свой элемент кинематической пары - геометрическое место точек возможного контакта с другим звеном, входящим в пару. Звенья бывают простыми и сложными. Простое звено входит в состав одной или двух пар, а сложное- трех и более.
|
|
|
Структурная и кинематическая схемы, отличия
Схемы могут быть структурными и кинематическими. Структурная схема кинематической цепи или механизма указывает только звенья и характер их взаимосвязи, т. е. вид кинематических пар. Кинематическая схема в дополнение к этому вычерчивается в масштабе с указанием тех размеров, которые определяют кинематические параметры механизма.
Что такое масштабный коэффициент в методе планов?
Масштабным коэффициентом называется отношение численного значения физической величины к длине отрезка в миллиметрах, изображающего эту величину.
В чём заключается структурный синтез рычажного механизма?
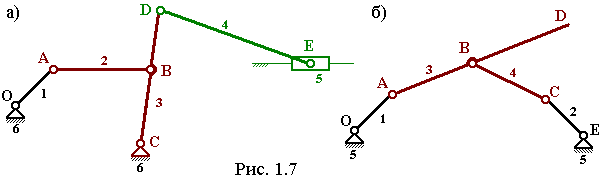
Структурный синтез механизмов с помощью структурных групп сводится к тому, что к входному механизму или к нескольким входным механизмам присоединяются структурные группы. При этом, поскольку число степеней свободы группы АссураW = 0, то её присоединение к механизму не меняет числа степеней свободы. На рис. 1.7 приведены примеры такого синтеза. На рис. 1.7а сформирован шестизвенный механизм 2-го класса 2-го порядка, структурно состоящий из входного кривошипа 1 и двух структурных групп: ABC и DE. Поскольку у входного механизма число степеней свободы W = 1, то и у всего механизма – тоже. На рис. 1.7б синтезирован пятизвенный механизм с числом степеней свободы W = 2. Здесь входные звенья – 1-е и 2-е, а ABC – структурная группа.
|
|
|
При таком синтезе созданный механизм не будет иметь пассивных связей. Если при дальнейшей проработке они потребуются по соображениям прочности или жесткости, то они могут быть введены конструктивно.
Дата добавления: 2018-06-01; просмотров: 1499; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!