Создание системы управления двухдвигательного электропривода шахтногоконвейера
Однодвигательный асинхронныйэлектропривод
2.1.1 Подсчет мощности асинхронногодвигателя.
Мощность двигателя для привода ленточного конвейера, имеющего разгрузку через концевой барабан, определяется по формуле:
P=K(2q0LcosbWворu+qLcosbWгр±qLsinbJ),кВт
,кВт
h 102 102 102
где К - учитывающий сопротивление на концевых барабанах коэффициент;
Wвор - сопротивления при работе конвейера на холостом ходу. Его можно будет найти, из связи с коэффициентом С , учитывающий массу ленты и опорных роликов:
C =2q0Wвор
102
Его ппреобразовав, получаем следующее:
Wвор
=102C .
2q0
где Wгр - при работе загруженного конвейера (при расчетах принимается, чтоWгр»0,005);
𝐿– конвейернаядлина,м; b- коныейерный угол наклона ,град;
h- КПД, передаточных механизмов привода;
q0 - вес 1-го метра ленты, кг⁄м;
q - вес груза, действующий на 1 м длины конвейера, кг⁄м;
| = |
3.6J
Q - производительность конвейера.
Исходные данные конвейера представлены ниже:
L = 1 5 м;
b=30 рад ;
h=0,9;
K = 1,25;
C = 0,018;
d = 8 00мм;
q0 = 15кг / м;
Q = 6 3 т/ч;
J= 1.6м / с;
Тогда:
 W =102 0, 018 =0.0612
W =102 0, 018 =0.0612
вор
q =
2 15
63
 3.6 1.6
3.6 1.6
=10.94
кг/м.
Таким образом полученная мощность составляет:
 P =1.25 ( 2 15 15 0.154 0.0612 1.6 +2 10.94 15 0.154 0.05 ±10.94 15 0.99 1.6) = 33.32 Вт.
P =1.25 ( 2 15 15 0.154 0.0612 1.6 +2 10.94 15 0.154 0.05 ±10.94 15 0.99 1.6) = 33.32 Вт.
0.9 102 102 102
Согласно результату, мы выбирает двигатель модностью 37кВт.
Далее рассчитаем параметры схемы замещения АД согласно справочнымданным:
PH = 37кВт U H = 220B
cosj= 0.89
h= 91%
| 1 |
| 1 |
| 2 |
| 2 |
| X |
| m |
2.1.2 Структурная схема и математическая модель системыТПН-АД.
Исходя из целевой работы шахтного конвейера, где не требуется регулирование высокой точности скорость асинхронного двигателя в установившемся режиме его работы, выбирает асинхронный двигатель с тиристорным регулятором напряжения (ТРН). Функцинальная схема представлена на рисунке 2.1. Выбор ТРН обосновывается следующими достоинствами: высокий КПД, небольшая стоимость, простота обслуживания, высокая надежность, экономичное потребление электроэнергии, что особенно важно при его основном режиме работы (установившемся режиме).
На рисунке 2.2 представлена структурная схема замкнутой системы тиристорный преобразователь напряжения – асинхронный двигатель.
В соответствии со структурной схемой при ПИ регуляторе скорости регулировочная характеристика системы ТПН-АД определится как w=
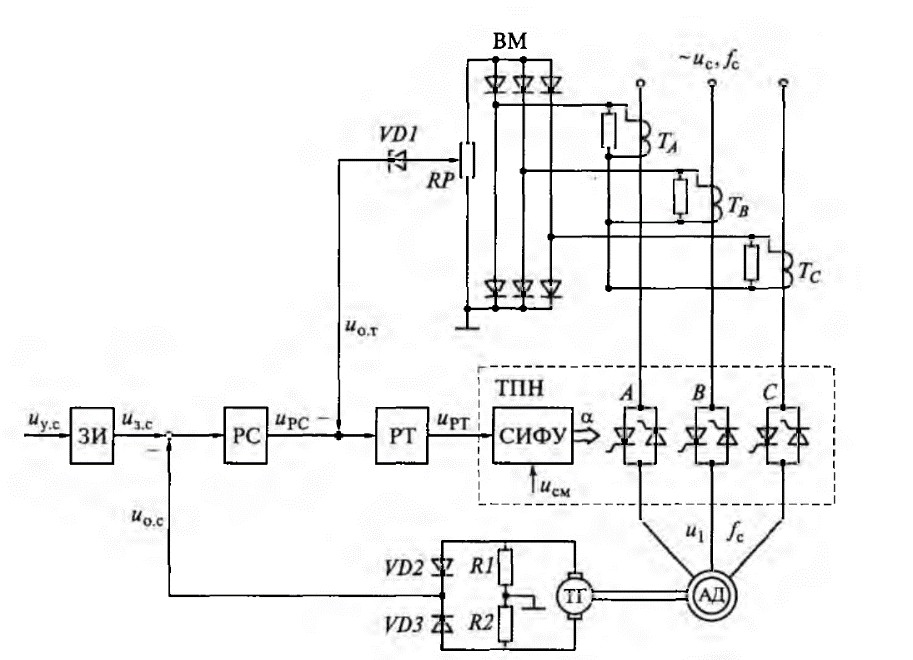
Рисунок 2.1 – Функциональная схема асинхронного электропривода
UJ .c / Ko.e
. а механические характеристики электропривода для всего
диапазона изменения сигнала управления скоростью при токе статора должны иметь абсолютную жесткость. Однако реально за счет ограничения выходного напряжения ТРН на уровне номинального значения напряжения АД . А также
снижения коэффициента передачи ku
вплоть до нуля при малых нагрузках и
коэффициента k1 j ) в области нагрузок, близких критическому моменту АД, жесткость механических характеристик вблизи предельных характеристик будет заметно меньше.

Рисунок 2.2. Структурная схема ТРН-АД
Поскольку уменьшение скорости АД, связано с уменьшением напряжения на обмотках его статора. Допустимый по условиям нагрева двигателя момент M /JolI при этом уменьшается в обратно пропорциональной зависимости от скольжения. То область применения замкнутых систем асинхронного электропривода с воздействием лишь на напряжение статора ограничена механизмами, у которых момент нагрузки при снижении скорости заметно уменьшается.
Структурная схема асинхронного двигателя состоит из интегрирующего
звена с передаточной функцией 𝑊(𝑝)= 1⁄𝐽𝑆с обратной связью 𝐾𝑤, и
входного напряжения 𝑈𝑝с коэффициентом передачи 𝐾𝑢. Тиристорный преобразователь напряжения системы ТПН-АД представлен в структурной схеме инерциально-динамическим звеном с передаточной функцией:
Wp ( p) =K p / (Tp S +1)
где 𝐾𝑝- передаточный коэффициент ТРН;
𝑇𝑝- постоянная времени.
Регулятор скорости (РС) с передаточной функцией ПИ-регулятора:
Wрм
=Tos +1
Tos
Wрм
=Tos +1
Tos
Обратная связь по скорости представлена безинерциальным звеном с коэффициентом обратной связи Кос.
Математическое описание структурной схемы системы ТПН-АД основано на передаточных функцияхсистемы
Математическое описание движения асинхронного двигателя составляется в соответствии с передаточной функцией в следующемвиде:
w=W(p)=1/JP M
(2.1)
где 𝜔- угловая частота вращения вала двигателя;
М - электромагнитный момент двигателя;
𝐽- момент инерции движения.
Запишем дифференциальное уравнение движения двигателя следующим образом:
или
Jdw=M dt
(2.2)
 dw= 1 M dt bT
dw= 1 M dt bT
M
(2.3)
так как 𝐽 = 𝛽𝑇𝑀(где 𝛽- жесткость механической характеристики двигателя; 𝑇𝑀- электромеханическая постоянная времени).
Уравнение электромеханического момента М (2.3) следующий вид:
M =K U U1 -Kww-Mc
где 𝑈1- напряжение с выхода ТПН;
𝑀𝑐- статический момент асинхронного двигателя.
(2.4)
Ввиду того, что представленную функцию ТПН можно записать в виде:
U1 =
Kp U Tp S+1
(2.5)
| pc |
 M =Ku
M =Ku
Kp U Tp S+1
- Kw
w-Mc
(2.6)
| pc |
 T dM +M =K K U
T dM +M =K K U
-K (T S +1)w-M
. (2.7)
p dt
u p pc
w p c
 dM =Ku
dM =Ku
Kp U
-K dw-Kww-1 M
- 1M
(2.8)
dt T
pc w
dt T T c T
p p p p
где 𝑈𝑝𝑐- напряжение с выхода регулятора скорости.
Подставив в уравнение (2.2) производную по скорости уравнение (2.3), при 𝐾𝜔 = 𝛽, получаем:
dM=
w-1 M
- ( 1 +1 ) M
(2.9)

| Ku KpU -b |
 dt T
dt T
pc T T
c T T
p p p M p
Уравнение регулятора скорости, на основании передаточной функции регулятора и 𝑈𝑧 = 𝑐𝑜𝑛𝑠𝑡:
Wpm
= Upc
Uz -Kww
=T1r+1
T2 r+1
(2.10)
запишем в следующем виде:
T dU p +U
=U-K T dw-Kw
(2.11)
2 dt
pc z oc 1 dt w
 Подставляя в уравнение (2.11) вместо производной по скорости уравнение (2.3),получаем:
Подставляя в уравнение (2.11) вместо производной по скорости уравнение (2.3),получаем:
| T2 bTM T2 |
| Koc T1 -Koc |
| z |
| pc |
w- U
(2.12)
| T |
где 𝑇1,𝑇2 - постоянные времени динамического звена регулятора скорости.
Математическое описание замкнутой системы ТПН-АД на основе уравнений (2.3), (2.9) и (2.12)можно записать в следующемвиде:
dx1 =a x
dt 1 2
dx2 =a x -a x -a x -a M
dt 2 3 3 1 4 2 5 c
dx3 =a U -a x -a x -a x
dt 6 7 7 2 8 1 9 3
Здесь:
a1 =
1
bTM

| T |
| 2 |
p
b
a3 =T
p
| 4 |
TM TP
a =1
5
a6 =
| 7 |
TP
1
Tz

 Koc T1
Koc T1
T2 bTM
| 8 |
T2
| 1 |
| T |
2
x1 =wx2 =M x3=Upc
Дата добавления: 2018-05-12; просмотров: 954; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!