Законы регулирования и типовые динамические звенья
Законы регулирования – закон изменения выходной величины во времени.
1)Пропорциональный закон заключается в том, что выходная величина регулятора пропорциональна разнице отклонения заданной величины и реального значения.
2)Интегральный закон регулирования.
У интегрального регулятора скорость перемещения прямо-пропорциональна отклонению регулируемого параметра.
Особенностью интегрального регулятора будут соответствовать разные значения регулируемого параметра. Этот регулятор обеспечивает высокую точность, однако он не обеспечивает устойчивость системы.


 – постоянная времени исполнительного механизма
– постоянная времени исполнительного механизма
 - пропорциональное звено с передаточной функцией
- пропорциональное звено с передаточной функцией
 – апериодическое звено с постоянной времени Т
– апериодическое звено с постоянной времени Т
 - коэффициент регулирования
- коэффициент регулирования
 - коэффициент усиления ОС
- коэффициент усиления ОС
3)Пропорционально-интегральное регулирование.
Сочетает свойства пропорционального и интегрального регуляторов.
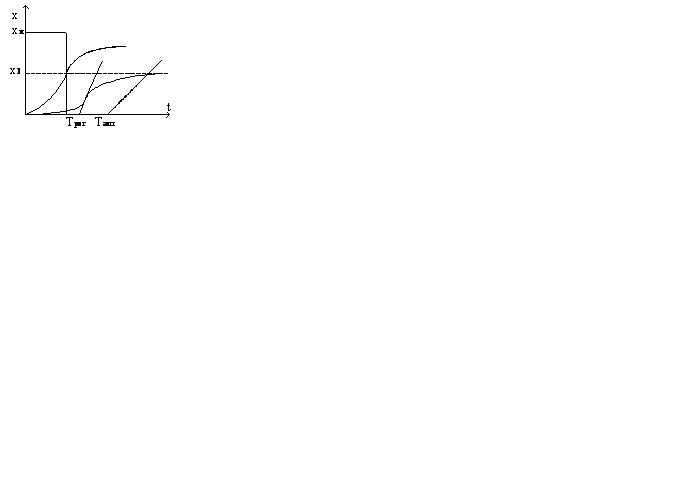
При обработки задания ПИ регулятора работает сначала как пропорциональный, а затем как интегральный.

4)Пропорционально-дифференциальный регулятор.
ПО регулятор вырабатывает сумму воздействий пропорциональной регулировочной величины, а так же скорость регулирования величины.
5)Пропорционально – дифференциально - интегральный закон (ПИО-регулятор)
У этих регуляторов выходная величина пропорциональна отклонению входной величины, интегралу производной по времени этого отклонения.

Передаточная функция идеального ПИО регулятора
- коэффициент усиления регулирования
 - время предварения
- время предварения
 - время изодрома
- время изодрома
Время изодрома – время, в течение которого интегральная составляющая регулирует воздействие достигает величины равной пропорциональности составляющей.
В структуре ПИД регулятора есть исполнительный механизм, он обладает интегрирующими свойствами: сам регулятор содержит обратную связь. ПИД регулятор настраивается сложнее, т.к имеет несколько параметров настройки, в которое входит время изодрома, от пропорционально интегральной составляющей и время предварения от дифференциальной составляющей, которые связаны между собой и при изменении одного из них ведет за собой изменения других.

Реализация типовых звеньев на электрических схемах
Изучение и исследование типовых динамических звеньев производится при помощи стандартных сигналов. За стандартный сигнал принимается скачкообразная функция.
1)Без инерционное звено.
Это такое звено в котором выходной сигнал пропорционален входному.

2)Апериодическое звено.
Звено, в котором при скачкообразном изменении входного сигнала его выходной сигнал запаздывает относительно входного и изменяется по экспоненциальному закону с постоянной времени Т.









Решение 
Для того чтобы получить зависимость выходного напряжения от времени, необходимо решить дифференциальное уравнение относительно 

3)Дифференцирующее звено
Звено, в котором сигнал изменяется пропорционально скорости изменения входного сигнала.



W(p)=kp – идеальное дифференциальное звено.
 - реальное дифференциальное звено.
- реальное дифференциальное звено.
4)Интегрирующее звено.
Звено, в котором выходной сигнал пропорционален интегралу по времени от входного сигнала.
 , где
, где  - постоянная двигателя,
- постоянная двигателя,  - магнитный поток возбуждения двигателя,
- магнитный поток возбуждения двигателя,  - частота вращения вала,
- частота вращения вала,  - сопротивление и ток якоря.
- сопротивление и ток якоря.


5)Колебательное звено
Звено, в котором при скачкообразном изменении входного сигнала, выходной сигнал стремится к своему новому установившемуся значению, совершая затухающие колебания.
 , где
, где  - постоянная времени,
- постоянная времени,  - коэффициент затухания.
- коэффициент затухания.

Типовые динамические системы
| № | Наименование | Передаточные функции | График | Примеры |
| 1 | Усилительное звено | 

| | Потенциометр, термометр |
| 2 | Апериодическое звено | 

| | |
| 3 | Неустойчивое апериодическое звено | 

| | |
| 4 | Интегрирующее звено | 

| | Двигатель |
| 5 | Дифференцирующее звено | 


| | |
| 6 | Колебательное звено | Устойчивое звено:
 Неустойчивое звено:
Неустойчивое звено:



| | |
| 7 | Интегродифференцирующее звено | 




| | |
Дата добавления: 2018-04-15; просмотров: 418; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!