Лабораторная работа № 2. Исследование динамики замкнутых систем автоматического регулирования
Назначение работы
2.1.1 Исследование динамики соединений типовых звеньев, моделирующих тепловые объекты регулирования.
2.1.2 Исследование динамики одноконтурных САР с простейшими законами регулирования.
2.1.3 Исследование влияния параметров настройки регулятора на переходные процессы в системе.
Теоретическое введение
Объект автоматизации вместе с автоматическим регулятором представляет собой систему автоматического регулирования. На рисунке 2.1 представлена принципиальная схема простейшей системы автоматического регулирования, предназначенной для поддержания на заданном значении регулируемой величины, определяющей режим работы объекта регулирования.
Величина регулируемого параметра измеряется с помощью чувствительного элемента (ЧЭ) и сравнивается в регуляторе с заданным значением, которое вырабатывается задающим устройством (ЗУ) и вводится в систему в виде управляющего воздействия.
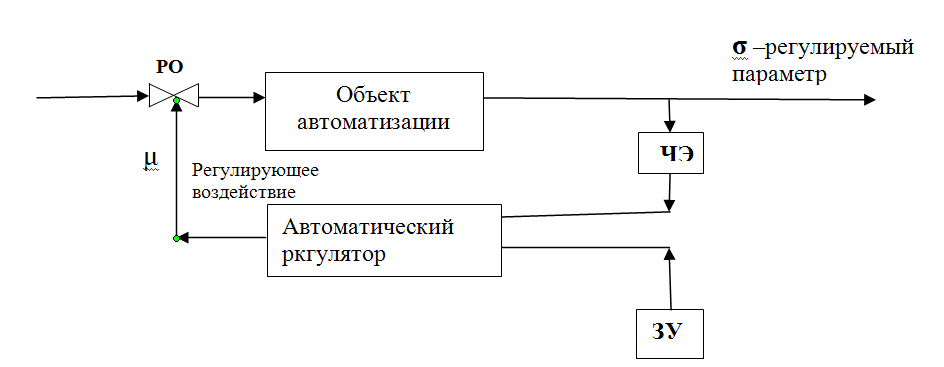
Рисунок 2.1
При отклонении регулируемой величины от заданного значения на входе регулятора появляется сигнал рассогласования. На выходе регулятора в этом случае вырабатывается сигнал, определяющий регулирующее воздействие на объект через регулирующий орган (РО) и направленный на уменьшение рассогласования. Регулятор воздействует на объект до тех пор, пока регулируемая величина не сравняется с заданным значением, которое может быть постоянным или меняться в зависимости от нагрузки.
|
|
|
Отклонение регулируемой величины от заданного значения может быть вызвано изменением управляющего воздействия или нарушениями работы объекта, связанными с различными возмущающими воздействиями.
При отклонении от равновесного состояния в системе автоматического регулирования возникают переходные процессы.
Изучение переходных процессов - одна из главных задач исследования динамики регулирования. Переходный процесс в системе должен быть устойчивым и обладать требуемым показателями качества. Характер переходного процесса зависит от динамических свойств системы, ее начального состояния, вида воздействия на систему, может быть определен аналитически, путем нахождения общего интеграла исследуемых дифференциальных уравнений, описывающих данную систему.
В качестве возмущения удобно пользоваться ступенчатой функцией.
Это возмущение обычно служит достаточно хорошей проверкой поведения системы регулирования в неблагоприятных условиях эксплуатации энергетических установок.
Основным недостатком аналитического метода определения переходного процесса являются большие вычислительные трудности, которые возрастают с увеличением порядка исходного дифференциального уравнения.
|
|
|
Наряду с аналитическими методами широко применяются расчетно-экспериментальные методы, основанные на применении аналоговых вычислительных машин.
Структурные схемы для решения уравнений движения отдельных элементов (приведены в лабораторной работе № 1) позволяют построить структурную схему моделирования всей системы автоматического регулирования. Такая схема отражает не только преобразования, происходящие со входными величинами в каждом из элементов системы регулирования, но также связи между элементами и внешними возмущениями, действующими на элементы.
С помощью аналоговых машин можно не только получить переходный процесс системы регулирования, описываемой заданной системой уравнений, но также выявить влияние коэффициентов на качество протекания исследуемого переходного процесса. Изменение коэффициента передачи по какому-либо входу аналогично изменению постоянной времени или коэффициентов усиления и самовыражения в исходных уравнениях.
Поскольку и постоянные времени, и коэффициенты выравнивания или усиления определяются характеристиками и конструктивными особенностями реальной системы, можно установить влияние того или иного конструктивного фактора на динамические свойства исследуемой системы. Это позволяет путем изменения конструкции того или иного элемента получить требуемые динамические характеристики.
|
|
|
2.3 Порядок выполнения работы
Лабораторная работа № 2 выполняется на аналоговой вычислительной машине МН-7 или МН-10.
Установка заданных параметров регулируемого объекта регулятора и последовательность действий при подаче на исследуемую систему возмущающего воздействия представлены в 1 разделе настоящего описания и здесь не рассматриваются.
При выполнении работы предполагается, что передаточная функция объекта W(P)обможет аппроксимироваться передаточной функцией в виде (2.1), которую можно представить произведением трех последовательно включаемых апериодических звеньев, набираемых на АЭВМ:
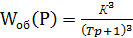 . ( 2.1)
. ( 2.1)
В качестве регулятора на АЭВМ набираются идеальные П, И, ПИ, - регуляторы с передаточными функциями, следующего вида:
П – регулятор : 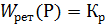 ;
;
И – регулятор: 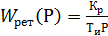 ;
;
ПИ – регулятор:  .
.
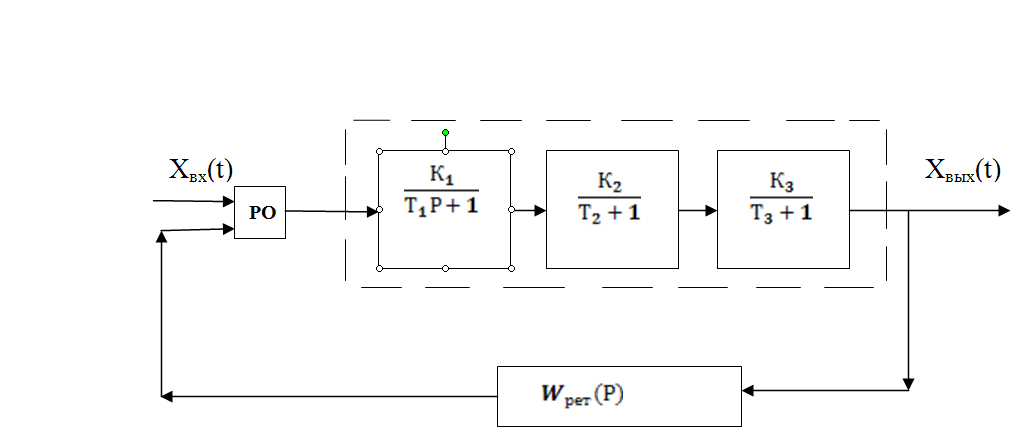 На рисунке 2.2 представлена схема моделировния регуляторов разного типа, которые могут собраны на АЭВМ. РО –регулирующий орган, обьект регулирования представлен в виде трех последовательно включенных апериодических звеньев (на схеме обведены пунктирной линией) и регулятор, подключенный параллельно обьекту регулирования.
На рисунке 2.2 представлена схема моделировния регуляторов разного типа, которые могут собраны на АЭВМ. РО –регулирующий орган, обьект регулирования представлен в виде трех последовательно включенных апериодических звеньев (на схеме обведены пунктирной линией) и регулятор, подключенный параллельно обьекту регулирования.
Рисунок 2.2
Дата добавления: 2018-04-05; просмотров: 432; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!