Схемы набора САР и определение переходных процессов в системе
2.4.1 Исследование динамических свойств регулируемого объекта.
В разделе 2.3 отмечалось, что динамические свойства исследуемого объекта аналогичны динамическим свойствам системы, состоящей из трех последовательно включенных апериодических звеньев. В этом случае схема объекта регулирования на коммутационном поле имеет вид:
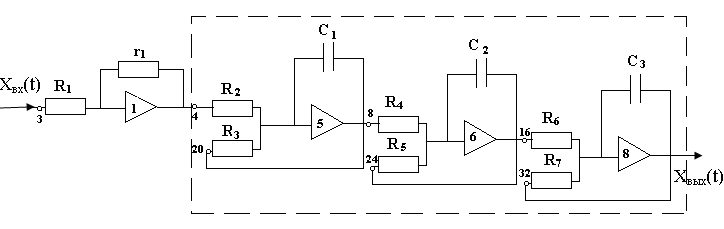
Рисунок 2.3
На рисунке 2.3 обьект регулирования обведен пунктирной линией. R1=r1=1 MОм; С1=С2=С3=1мкФ;  ; В частном случае, когда
; В частном случае, когда
К2= К3= К4= 1 и Т2= Т3= Т4= Т, то  =
=  =…=
=…=  =
=  .
.
Подав на вход регулируемого объекта (гнездо 3) единичное ступенчатое возмущение, регулируем величину выходного сигнала как после каждого звена, так и на выходе из цепочки (Хвых).
Исходные данные для проведения опыта представлены в таблице 1 приложения Б.
2.4.2 Исследование переходных процессов в одноконтурной САР с П-регулягором.
Схема набора системы регулирования на коммутационном поле приведена на рисунке 2.4.
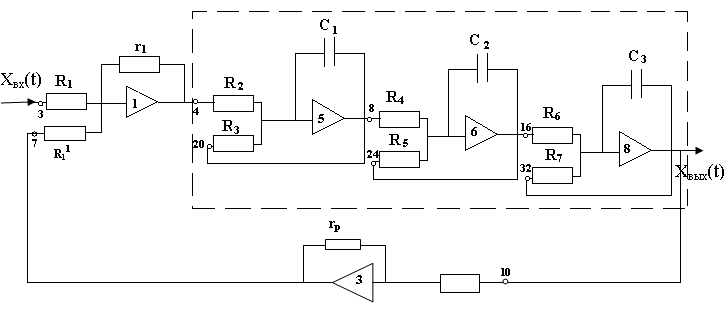
Рисунок 2.4
R1 = R11 = r = 1 МОм.
Передаточная функция объекта регулирования и его параметры остаются такими же, что и в первом опыте. Коэффициент усиления регулятора изменяется сопротивлением Rp,  .
.
Подав на вход (клемма 3) рассматриваемой системы единичный ступенчатый сигнал Хвх (τ) =Uвх, на выходе ее (Хвых (τ) =Uвых) через каждые 5 секунд по вольтметру записывают переходный процесс в течение 5-10 минут.
При этом в зависимости от величины установленного коэффициента усиления регулятора переходный процесс в системе будет апериодический (а), колебательный с заданной степенью затухания (б), колебательный с незатухающими колебаниями (в).
|
|
|
Исходные данные представлены в таблице 2 приложения Б.

Рисунок 2.5
2.4.3 Исследование переходных процессов в одноконтурной САР с
И-регулягором.
Схема набора системы регулирования на коммутационном поле приведена на рисунке 2.6.

Рисунок 2.6
R1=R11=1 Мом
Коэффициент усиления регулятора устанавливается сопротивлением Rp. Подав на вход Хвх (τ) исследуемой системы ступенчатый сигнал, на выходе регистрируем по вольтметру выходную величину Хвых (τ) через каждые 5 секунд в течение 5-10 минут.
Переходные процессы, возникающие в системе (см. рисунок 2.7), зависят от установленных параметров настройки регулятора (Кр/Ти), причем процесс может быть апериодическим (а), колебательным с заданной степенью затухания  (б), колебательный с незатухающими колебаниями (в).
(б), колебательный с незатухающими колебаниями (в).
 Исходные данные представлены в таблице 3 приложения Б.
Исходные данные представлены в таблице 3 приложения Б.
Рисунок 2.7
2.4.4 Исследование переходных процессов в одноконтурной САР с
ПИ – регулятором.
Схема набора системы регулирования на коммутационном поле МН-7 приведена на рисунке 2.8.
|
|
|
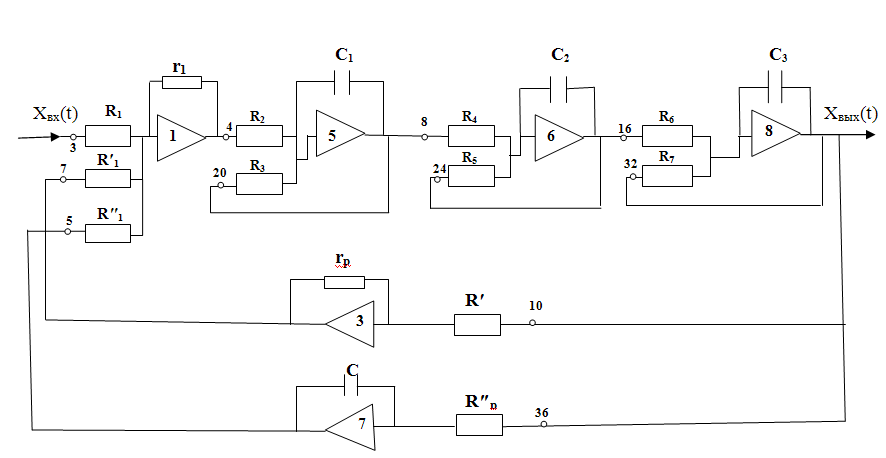
Рисунок 2.8
 .
.
Подав на вход Хвх (τ) исследуемой системы ступенчатый сигнал, на выходе регистрируем по вольтметру выходную величину Хвых (τ) через каждые 5 секунд в течение 5-10 минут.
Переходные процессы, возникающие в системе, будут аналогичны процессам на рисунке 2.7, причем вид их зависит от величины установленных параметров настройки регулятора.
Исходные данные представлены в таблице 4 приложения Б.
Дата добавления: 2018-04-05; просмотров: 321; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!