Вопрос 52. Расчет регулировочных резисторов в цепи ротора асинхронного двигателя.
Расчет сопротивления добавочного резистора R2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики.
Если искусственная характеристика задана полностью и определена точка критического момента (например, характеристика 2 на рис. 5.7), то в этом случае расчет основывается на формуле

с помощью которой находится отношение критических скольжений АД на естественной 1 и искусственной 2 характеристиках:
Sк.е / Sк.и=Rр' / (Rр'+ R2д1') = Rр / (Rр + R2д1)
где Rp - сопротивление фазы обмотки ротора АД.
Из это формулы определим искомое значение:
R2д1= Rр (s.и /sе - 1)
По методу отрезков:
R2д1 = Rном bc / ae
Вопрос 53. Регулирование скорости ад изменением напряжения.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения.
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрег, а скольжение от Uрег не зависит.

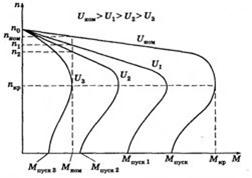


Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении или на холостом ходу. Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.
Вопрос 54. Замкнутые электроприводы с подчиненным регулированием координат.
Замкнутые электроприводы с принципом подчиненного регулирования координат обеспечивают эффективное и качественное регулирование координат в системе П – Д. Этот принцип предусматривает регулирование каждой координаты с помощью своего отдельного регулятора и соответствующей обратной связи, т. е. регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи.
Управление внутренним контуром с помощью выходного сигнала внешнего контура определяет еще одно ценное свойство таких систем. Оно заключается в возможности простыми средствами ограничивать любую регулируемую координату, например ток и момент, на заданном уровне. Для этого требуется всего лишь ограничить сигнал, поступающий с внешнего контура.

Дата добавления: 2018-02-15; просмотров: 1542; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!