Б) Дуга переменного тока в условиях активной деионизации.
Если столб дуги переменного тока подвергается интенсивной деионизации, то в этом случае механизм гашения дуги существенно меняется по сравнению с предыдущим (открытая дуга в цепи высокого напряжения). За счет активного воздействия газовой или жидкой среды диаметр дугового канала сокращается (плотность тока повышается) и изменение его следует почти синхронно с током.
При подходе тока к нулю дуговой столб приобретает весьма малые размеры и благодаря этому быстро распадается после достижения током нулевого значения, теряет свою проводимость и приобретает заметную электрическую прочность. В таком случае восстановление дуги в следующий полупериод связано с пробоем межконтактного промежутка. Эти условия характерны для отключающих аппаратов относительно высокого напряжения.
Таким образом, дуга переменного тока в условиях активной
деионизации дугового столба представляет собой такое явление, когда при каждом переходе тока через нуль возникает соревнование двух процессов, а именно: процесса восстановления электрической прочности промежутка и процесса восстановления напряжения на промежутке. Исходя из такой трактовки процесса, нетрудно заключить, что для угасания дуги переменного тока при интенсивной
деионизации необходимо обеспечить такой режим, при котором электрическая прочность дугового промежутка после достижения током его нулевого значения нарастала бы достаточно быстро и достигала бы достаточного уровня.
|
|
|
На рис. 9.2 показано изменение тока в цепи и напряжения на дуге, подвергающейся интенсивной деионизации, но все же горящей устойчиво в течение нескольких полупериодов. Как видно из этого рисунка, после первого и второго переходов тока через нуль напряжение на дуговом промежутке достигает относительно высоких значений пиков напряжения зажигания U3,при которых возникает зажигание дуги в последующий период. В процессе протекания тока наблюдается задержка на нуле (ожидание пробоя). Эти задержки в токе на нуле могут быть большей или меньшей величины в зависимости от существующих условий в цепи (сдвига фаз между током и напряжением, величины напряжения, действующего в цепи, постоянных контура L, С и R).
Если обратиться снова к рис. 9.2, можно установить, что после третьего перехода через нуль прекратилось протекание тока по цепи, т.е. дуга погасла, а на межконтактном промежутке выключателя полностью восстановилось напряжение, развиваемое источником (рис. 9.2, а). Сдвиг фаз между током и напряжением при этом принят близким к 90°. Как можно видеть из рисунка, при активной деионизации дуги пики напряжения зажигания ее обычно значительно превосходят по своей величине напряжение горения дуги. Таким образом, в отличие от открытой дуги, напряжение горения U Д не является определяющей величиной при оценке условий угасания дуги.
|
|
|
Из рис. 9.2 также видно, что при первом переходе тока через нуль пик напряжения на дуге несколько меньше напряжения источника, и дуга легко зажигается вновь. При втором переходе тока через нуль, пик напряжения зажигания дуги несколько превышает напряжение зажигания при первом переходе тока через нуль, но все же дуга зажигается. При восстановлении напряжения на промежутке после третьего перехода через нуль возникают колебания, вследствие чего напряжение на нем существенно превосходит напряжение источника (в данном рассмотрении – амплитуду напряжения).
Теоретически, если пренебречь пиком гашения дуги и затуханием колебаний (контур без потерь), амплитудное значение восстанавливающегося напряжения на дуговом промежутке может достигнуть двойной величины. При третьем переходе тока через нуль прочность промежутка достигает такой величины, что пик восстанавливающегося напряжения U оказывается недостаточным, чтобы вызвать повторное зажигание дуги, и цепь обрывается окончательно. Напряжение на промежутке в своем переходном режиме совершает ряд колебаний и далее меняется с рабочей частотой.
|
|
|
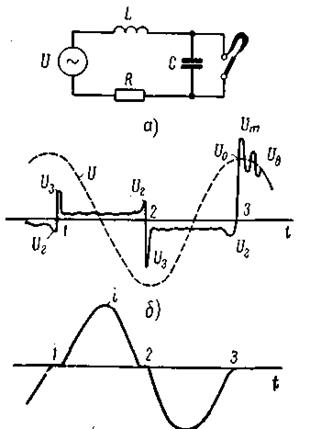
Рис. 9.2. Процессы при гашении дуги переменного тока
При оценке жесткости сети обычно подразумевают идеальный выключатель, т.е. полагают, что напряжение на дуге равно нулю, а после перехода тока через нуль сопротивление промежутка становится сразу равным бесконечности. При таком предположении восстановление напряжения на выключателе начинается с нуля, а не с пика гашения, и на затухание восстанавливающегося напряжения оказывает влияние только сопротивление цепи.
Существенно важной величиной при оценке жесткости сетей является коэффициент превышения амплитуды, представляющий собой отношение максимальной величины восстанавливающегося напряжения Uвтк мгновенному значению напряжения источника в момент перехода тока через нуль.
Таким образом, условие гашения дуги переменного тока при активной деионизации промежутка может быть сформулировано следующим образом: если после перехода тока через нуль прочность промежутка нарастает быстрее и остается все время выше, чем восстанавливающееся напряжение на выключателе, то процесс заканчивается угасанием дуги.
|
|
|
При несоблюдении этого условия наступают повторный пробой и восстановление дуги.
в) Дуга переменного тока в условиях отключения цепей низкого напряжения. В установках низкого напряжения (до 1000 В)электрическое сопротивление столба дуги обычно бывает соизмеримым с сопротивлением отключаемой цепи, а напряжение на дуге – с напряжением источника питания. В таких условиях уже нельзя пренебрегать влиянием напряжения (и сопротивления) дуги, а с другой стороны – нельзя не рассматривать явлений на нуле тока, т.е. не учитывать влияния восстановления прочности при переходе тока через нуль.
Общая картина процессов при отключении цепи переменного тока низкого напряжения представлена на рис. 9.3. До момента размыкания контактов аппарата (МРК) по цепи протекал ток I, определяемый в совокупности величинами  .
.
В момент t0разомкнулись контакты аппарата и начало возрастать сопротивление дугового промежутка Rд и напряжение на нем UД.
Увеличивающееся при гашении дуги сопротивление Rд приводит к некоторому уменьшению амплитудных значений тока (I1, I2, I3) по полупериодам и уменьшению сдвига фаз между током цепи iД и напряжением источника UИ. Соответствующие углы сдвига фаз, определяемые отрезками времени между моментами перехода через нуль тока дуги и напряжения источника, обозначены через  . Понятие о сдвиге фаз между током и напряжением относится к синусоидальным явлениям. В процессе гашения электрической дуги в установках низкого напряжения синусоида тока искажается вследствие роста сопротивления дуги. Поэтому понятие о сдвиге фаз здесь носит условный характер. В моменты перехода тока дуги через нуль (точки 1 и 2)не создавалось необходимых условий для окончательного погасания дуги за этими переходами, и она повторно зажигалась вслед за ними. В момент 3-го перехода тока через нуль такие условия создались, дуга погасла и протекание тока по цепи прекратилось. За этим переходом по цепи может протекать лишь небольшой остаточный ток i0CT, определяемый так называемой остаточной проводимостью межконтактного промежутка аппарата.
. Понятие о сдвиге фаз между током и напряжением относится к синусоидальным явлениям. В процессе гашения электрической дуги в установках низкого напряжения синусоида тока искажается вследствие роста сопротивления дуги. Поэтому понятие о сдвиге фаз здесь носит условный характер. В моменты перехода тока дуги через нуль (точки 1 и 2)не создавалось необходимых условий для окончательного погасания дуги за этими переходами, и она повторно зажигалась вслед за ними. В момент 3-го перехода тока через нуль такие условия создались, дуга погасла и протекание тока по цепи прекратилось. За этим переходом по цепи может протекать лишь небольшой остаточный ток i0CT, определяемый так называемой остаточной проводимостью межконтактного промежутка аппарата.
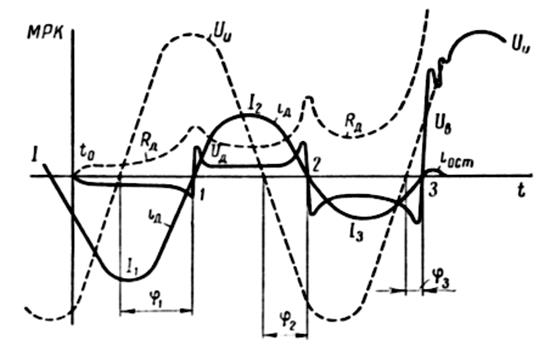
Рис. 9.3. Характер процессов при отключении цепи переменного тока
низкого напряжения
При анализе условий возникновения между контактами выключателя электрической прочности, необходимой для гашения дуги, обычно рассматривают раздельно короткие и длинные промежутки с целью наиболее четкого выявления тех особенностей, которые необходимо использовать при конструировании дугогасительных устройств выключателей, предохранителей, контакторов, разрядников и пр.
В действительности, особенно в аппаратах низкого напряжения, имеют место смешанные процессы, т.е. свойственные и коротким, и длинным дугам одновременно.
Лекция №10
Магнитные усилители (МУ), дроссельный МУ,
характеристики и режимы работы.
МУ с самоподмагничиванием (МУС).
Двухполупериодные схемы МУС
МАГНИТНЫЕ УСИЛИТЕЛИ
ОБЩИЕ СВЕДЕНИЯ
Бесконтактными электроаппаратами называют устройства, предназначенные для включения, выключения или переключения (коммутации) электрических цепей без физического разрыва цепи.
Основой построения бесконтактных электроаппаратов служат различного рода нелинейные элементы. Главными из них являются нелинейные индуктивности – ферромагнетик с обмотками и нелинейные активные сопротивления – полупроводниковые приборы.
Ниже будут рассмотрены выполняемые на базе ферромагнетиков и полупроводниковых приборов некоторые основные элементы (магнитные и полупроводниковые усилители, логические элементы), на базе которых могут быть выполнены различного рода бесконтактные электрические аппараты.
Большинство из рассматриваемых элементов называют усилителями. Блок-схема простейшего усилителя приведена на рис. 10.1, в нем последовательно с напряжением питания включены нагрузка Z Н и управляемое нелинейное сопротивление (L = var, или R = var); эта цепь называется рабочей. Нелинейное сопротивление управляется от специального источника сигнала управления (чаше от источника постоянного напряжения Uy. Цепь, состоящая из источника сигнала управления, сопротивления Z и нелинейного сопротивления, называется цепью управления.
С изменением тока цепи управления iy меняются параметры нелинейного сопротивления и ток в рабочей цепи iр. В результате оказывается возможным малыми мощностями в цепи управления управлять большими мощностями в нагрузке. Усиление происходит за счет мощности источника питания.
Если управляемым нелинейным сопротивлением является ферромагнитный сердечник с обмотками (L = var) – усилитель называется магнитным. Если это полупроводниковый прибор (R= var) – усилитель называется полупроводниковым.
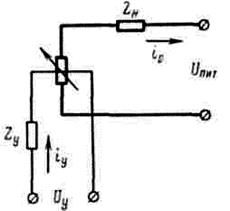
Рис. 10.1. Блок-схема усилителя
Полупроводниковые усилители питаются от источника постоянного или переменного тока. Магнитные усилители – от источника переменного напряжения (иногда импульсного, однополярного).
В то время как принцип работы полупроводникового усилителя весьма прост и достаточно поясняется блок-схемой (рис. 10.1), принцип работы магнитного усилителя требует специального пояснения.
Дело в том, что при перемагничивании ферромагнитного сердечника на его рабочей обмотке (включенной в рабочую цепь) создается противоэ.д.с, препятствующая протеканию тока в рабочей цепи. Если при этом сердечник достиг насыщения (состояния, при котором резко уменьшается магнитная проницаемость ферромагнетика), противоэ.д.с. на его рабочей обмотке резко падает и практически вовсе не препятствует протеканию рабочего тока, т.е. ферромагнитный сердечник играет роль дросселя, заслонка которого то закрыта (сердечник перемагничивается, не достигая насыщения), то открыта (сердечник, перемагничиваясь, достиг насыщения). Причем в течение одного полупериода напряжения питания сердечник может одну часть этого полупериода находиться в «непроводящем состоянии» (перемагничивается, не достигнув насыщения), а другую – в «проводящем» (достигнув насыщения). Ферромагнитный сердечник, работающий в таком режиме, будем называть дросселем насыщения (ДН). В зависимости от того, какую часть полупериода ДН находится в непроводящем состоянии, а какую – в проводящем, будет зависеть величина тока и напряжения на нагрузке. Соотношение проводящих и непроводящих долей полупериода зависит от многих факторов, в частности, от величины напряжения питания и, что весьма существенно, от величины постоянной составляющей тока (или напряжения) на какой-либо из обмоток ДН.
Дроссель насыщения, в котором не предусмотрено протекание по обмоткам постоянной составляющей тока, называется дросселем насыщения без подмагничивания, а в котором предусмотрено протекание по какой-либо из обмоток постоянной составляющей тока, называется дросселем насыщения с подмагничиванием.
Магнитные усилители выполняются на дросселях насыщения с подмагничиванием: благодаря разной величине постоянной составляющей тока (или напряжения) изменяется соотношение проводящих и непроводящих долей полупериода и изменяется ток (напряжение) в нагрузке.
Магнитные усилители делятся на две основные группы: дроссельные магнитные усилители и магнитные усилители с самоподмагничиванием.
Дроссельным называют магнитный усилитель, по рабочим обмоткам которого протекает переменный ток (иногда их называют ДН с подмагничиванием).
Магнитным усилителем с самоподмагничиванием (МУС) называют усилитель, по рабочим обмоткам которого протекает однополупериодный выпрямленный ток (или однополярный импульсный), т.е. в МУС по рабочим обмоткам проходит постоянная составляющая тока, и его сердечники можно было бы назвать ДН с самоподмагничиванием.
а) Принцип действия. Магнитный усилитель (МУ) – это электрический аппарат, предназначенный для усиления электрического сигнала по току, напряжению или мощности. В схеме простейшего дроссельного МУ (ДМУ), называемого дросселем насыщения (рис. 10.2), используется управляемое индуктивное сопротивление. Замкнутый магнитопровод изготавливается из материала с резко выраженной нелинейностью кривой намагничивания B = f(H). Рабочая обмотка переменного тока wp включается в цепь нагрузки RH. В обмотку управления wy подается управляющий постоянный ток Iу. Кривая намагничивания материала магнитопровода дана на рис. 10.3. При прохождении переменного тока по обмотке wp на обмотке wy наводится э.д.с. Эта э.д.с. будет создавать переменный ток в цепи управления, для ограничения которого включается балластный дроссель Хб.
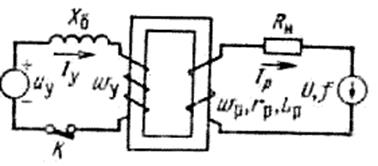
Рис. 10.2. Дроссельный МУ на одном магнитопроводе
При отсутствии тока управления (цепь управления разомкнута) индуктивное сопротивление обмотки 
 , (10.1)
, (10.1)
где S –активное сечение магнитопровода;
 – число витков рабочей обмотки;
– число витков рабочей обмотки;
 ее индуктивность;
ее индуктивность;
l – средняя длина магнитной линии в магнитопроводе.
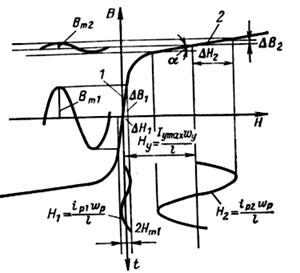
Рис. 10.3. Изменение индукции В, напряженности Н и тока Iр
при Iу = 0 и Iу = Iутах
При неизменных S, , l индуктивность  определяется абсолютной магнитной проницаемостью
определяется абсолютной магнитной проницаемостью  . При
. При  состояние магнитопровода характеризуется ненасыщенной зоной 1 (см. рис. 10.3). В этой зоне магнитная проницаемость
состояние магнитопровода характеризуется ненасыщенной зоной 1 (см. рис. 10.3). В этой зоне магнитная проницаемость  велика, и индуктивное сопротивление обмотки
велика, и индуктивное сопротивление обмотки

максимально.
Обычно  , поэтому ток в цепи рабочей обмотки определяется только значением
, поэтому ток в цепи рабочей обмотки определяется только значением  , и имеет минимальное значение, равное
, и имеет минимальное значение, равное  . Напряженность магнитного поля
. Напряженность магнитного поля  находится по индукции
находится по индукции
 . (10.2)
. (10.2)
Подадим в обмотку управления такой постоянный ток управления IУmax, чтобы рабочая зона перешла в область 2. В этой области насыщения материал имеет магнитную проницаемость  . Индуктивное сопротивление рабочей обмотки
. Индуктивное сопротивление рабочей обмотки  резко уменьшается. Значения
резко уменьшается. Значения  выбираются так, что
выбираются так, что  . Тогда ток в цепи определяется только сопротивлением нагрузки. При этом все напряжение источника питания приложено к сопротивлению
. Тогда ток в цепи определяется только сопротивлением нагрузки. При этом все напряжение источника питания приложено к сопротивлению  нагрузки
нагрузки  и активному сопротивлению rррабочей обмотки
и активному сопротивлению rррабочей обмотки
 (10.3)
(10.3)
Мы рассмотрели два крайних режима усилителя – режим холостого хода, когда  и ток в нагрузке имеет минимальное значение
и ток в нагрузке имеет минимальное значение  , и режим максимального тока нагрузки. При плавном увеличении тока
, и режим максимального тока нагрузки. При плавном увеличении тока  ток нагрузки плавно увеличивается от
ток нагрузки плавно увеличивается от  до максимального значения
до максимального значения  за счет уменьшения магнитной проницаемости. Характеристика управления ДМУ приведена на рис. 10.4. По оси абсцисс отложен ток управления, приведенный к рабочей обмотке:
за счет уменьшения магнитной проницаемости. Характеристика управления ДМУ приведена на рис. 10.4. По оси абсцисс отложен ток управления, приведенный к рабочей обмотке:
 (10.4)
(10.4)
Идеальная характеристика управления 1 является прямой, идущей из начала координат под углом 45° к оси  . Реальная характеристика 2 отличается от идеальной наличием тока холостого хода
. Реальная характеристика 2 отличается от идеальной наличием тока холостого хода  и плавным переходом от линейной части характеристики к току
и плавным переходом от линейной части характеристики к току  .
.
В линейной зоне характеристики соблюдается равенство средних значений МДС:
 . (10.5)
. (10.5)
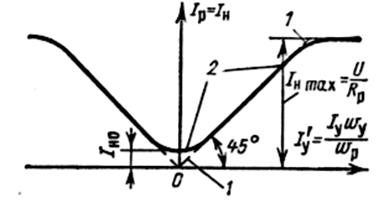
Рис. 10.4. Характеристика управления ДМУ
Равенство (10.2) не зависит от колебаний питающего напряжения, сопротивления нагрузки и частоты источника. Данному значению тока управления всегда соответствует единственное значение тока нагрузки  . Таким образом, ДМУ является управляемым источником тока.
. Таким образом, ДМУ является управляемым источником тока.
Вследствие низких значений коэффициента усиления и большой массы ДМУ в настоящее время применяются редко, в основном как измерительные трансформаторы постоянного тока и напряжения. В первом случае роль обмотки управления wyвыполняет шина, по которой проходит измеряемый постоянный ток  . Под воздействием магнитного потока, созданного током Iу, магнитопроводы 1 и 11 насыщаются (рис. 10.5, а). Рабочие обмотки
. Под воздействием магнитного потока, созданного током Iу, магнитопроводы 1 и 11 насыщаются (рис. 10.5, а). Рабочие обмотки  подключены к источнику переменного напряжения upи создают магнитные поля с индукцией Bp1 и Вр2. В цепь рабочих обмоток через выпрямительный мост включен измерительный прибор ИП, который является нагрузкой усилителя. Допустим, в рассматриваемый полупериод вектор индукции ВР1 совпадает по направлению с вектором индукции Ву управляющего поля обмотки wy,а вектор индукции Вр2 направлен встречно вектору Ву. В результате магнитопровод 1 насыщен и сопротивление обмотки хр1переменному току равно нулю, а магнитопровод 11, наоборот, далек от насыщения. Материал магнитопроводов 1 и 11 имеет кривую намагничивания, форма которой близка к прямоугольной. Обозначим через В s значение индукции насыщения материала магнитопровода. В таком материале при суммарном значении магнитной индукции
подключены к источнику переменного напряжения upи создают магнитные поля с индукцией Bp1 и Вр2. В цепь рабочих обмоток через выпрямительный мост включен измерительный прибор ИП, который является нагрузкой усилителя. Допустим, в рассматриваемый полупериод вектор индукции ВР1 совпадает по направлению с вектором индукции Ву управляющего поля обмотки wy,а вектор индукции Вр2 направлен встречно вектору Ву. В результате магнитопровод 1 насыщен и сопротивление обмотки хр1переменному току равно нулю, а магнитопровод 11, наоборот, далек от насыщения. Материал магнитопроводов 1 и 11 имеет кривую намагничивания, форма которой близка к прямоугольной. Обозначим через В s значение индукции насыщения материала магнитопровода. В таком материале при суммарном значении магнитной индукции  напряженность поля
напряженность поля  и
и  B > BS,
B > BS,  и, следовательно,
и, следовательно,  и не оказывает влияния на полное сопротивление цепи рабочих обмоток. В магнитопроводе 11, где
и не оказывает влияния на полное сопротивление цепи рабочих обмоток. В магнитопроводе 11, где  <
<  можно записать
можно записать
 ,
,
или
 (10.6)
(10.6)
Из этого равенства следует, что ток  в течение рассматриваемого полупериода повторяет форму тока управления Iу. Так как
в течение рассматриваемого полупериода повторяет форму тока управления Iу. Так как  то и ток
то и ток  в течение данного полупериода, т.е. принимает прямоугольную форму. В следующий полупериод встречно направлены вектора индукции Вp1 и By в магнитопроводе 1. Ток изменит знак, но сохранит прямоугольную форму. На рис. 10.5, б показаны временные зависимости тока управления Iу, тока в цепи рабочих обмоток
в течение данного полупериода, т.е. принимает прямоугольную форму. В следующий полупериод встречно направлены вектора индукции Вp1 и By в магнитопроводе 1. Ток изменит знак, но сохранит прямоугольную форму. На рис. 10.5, б показаны временные зависимости тока управления Iу, тока в цепи рабочих обмоток  и тока
и тока  , протекающего через измерительный прибор ИП.Мгновенные значения токов связаны равенством
, протекающего через измерительный прибор ИП.Мгновенные значения токов связаны равенством  которое выполняется и для средних значений
которое выполняется и для средних значений 
Реальная форма кривой намагничивания материала магнитопроводов отличается от прямоугольной. Поэтому и форма тока ipне прямоугольна, а в токе iнпоявляются глубокие провалы, что вызывает определенную погрешность измерения.
Рассмотренное устройство может быть использовано и в качестве измерительного трансформатора напряжения постоянного тока. Для этого многовитковая обмотка управления wу подключается к измеряемому напряжению U через большое добавочное сопротивление  (рис. 10.5, в).
(рис. 10.5, в).
Ток в обмотке управления wy пропорционален напряжению:  Для уменьшения потерь в добавочном сопротивлении ток
Для уменьшения потерь в добавочном сопротивлении ток  берется малым – около 10 мА. Измерение этого тока производится так же, как в рассмотренной выше схеме.
берется малым – около 10 мА. Измерение этого тока производится так же, как в рассмотренной выше схеме.
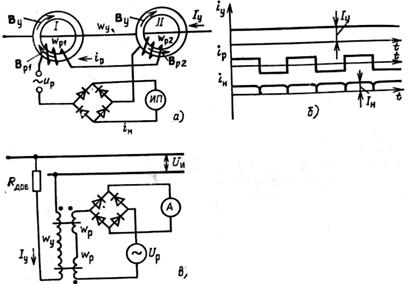
Рис. 10.5. Схема трансформатора постоянного тока (а), изменение токов в его обмотках (б) и измерительный трансформатор постоянного напряжения (в)
УСИЛИТЕЛЬ С САМОНАСЫЩЕНИЕМ (МУС)
Физические процессы. Если в цепь рабочей обмотки МУ включить диод, то под действием постоянной составляющей выпрямленного тока происходит подмагничивание магнитопровода. Такие усилители называются усилителями с самоподмагничиванием или с самонасыщением (МУС). При рассмотрении такого усилителя (рис. 10.6) примем, что обратное сопротивление диода VD равно бесконечности, а прямое учитывается сопротивлением RB . В цепи управления включен балластный дроссель Хб для ограничения переменного тока, создаваемого рабочей обмоткой. Полярность напряжения источника, при которой диод проводит ток, примем за положительную, полупериод, при котором ток проходит через нагрузку, назовем рабочим (РП). Процессы, происходящие в МУС, в основном определяются формой динамической петли гистерезиса материала магнитопровода. Динамической петлей гистерезиса материала называется зависимость В(Н)при быстром изменении намагничивающего тока. Вследствие магнитной вязкости и вихревых токов в материале процесс перемагничивания замедляется и ширина динамической петли гистерезиса превышает ширину статической петли. Чем больше  тем шире петля гистерезиса. Для материала с высокой степенью прямоугольности кривой намагничивания динамическая петля гистерезиса имеет форму параллелограмма (рис. 10.7).
тем шире петля гистерезиса. Для материала с высокой степенью прямоугольности кривой намагничивания динамическая петля гистерезиса имеет форму параллелограмма (рис. 10.7).
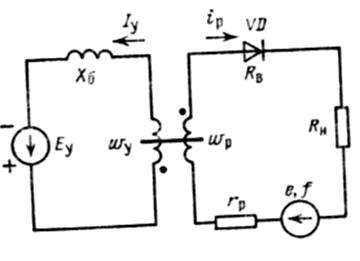
Рис. 10.6. Схема однополупериодного МУС
При отсутствии управляющего поля магнитопровод под-магничивается полем, созданным постоянной составляющей тока рабочей обмотки. Под действием этого поля в магнитопроводе устанавливается остаточная индукция  В рабочем полупериоде рабочая точка, характеризующая состояние магнитопровода, с ростом тока перемещается по участку 1-3. Так как магнитопровод насыщен, индуктивное сопротивление обмотки wp равно нулю. Все напряжение источника приложено к активному сопротивлению цепи
В рабочем полупериоде рабочая точка, характеризующая состояние магнитопровода, с ростом тока перемещается по участку 1-3. Так как магнитопровод насыщен, индуктивное сопротивление обмотки wp равно нулю. Все напряжение источника приложено к активному сопротивлению цепи  К концу рабочего полупериода состояние магнитопровода вновь возвращается в точку 1. Таким образом, при отсутствии сигнала управления ток нагрузки в рабочий полупериод
К концу рабочего полупериода состояние магнитопровода вновь возвращается в точку 1. Таким образом, при отсутствии сигнала управления ток нагрузки в рабочий полупериод

 (10.7)
(10.7)
В следующий полупериод диод не пропускает ток и состояние магнитопровода характеризуется точкой 11 (напряжение источника приложено к вентилю и iР =0).








 ДВУХПОЛУПЕРИОДНЫЕ СХЕМЫ МУС
ДВУХПОЛУПЕРИОДНЫЕ СХЕМЫ МУС
Однополупериодная схема (см. рис. 10.6) практически не применяется из-за следующих недостатков:
1. Для ограничения наведенных в обмотке управления токов необходим балластный дроссель, наличие которого ухудшает выходные параметры МУС.
2. Прохождение рабочего тока лишь в течение одного полупериода уменьшает мощность нагрузки.
3. Схема пригодна для питания нагрузки только выпрямленным током.
| |
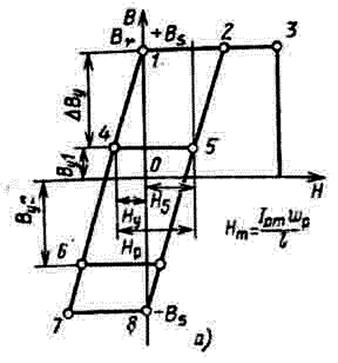
Рис. 10.7. Магнитный усилитель с самонасыщением:
динамическая петля гистерезиса
На рис. 10.8 изображены двухполупериодные мостовые схемы усилителя с нагрузкой на постоянном и переменном токе. При полярности вторичной обмотки питающего трансформатора, обозначенной на рис. 10.8, а, в верхнем усилителе МУС 1 имеет место рабочий полупериод, а в нижнем МУС 11 – полупериод управления. В следующем полупериоде МУС 11 будет находиться в рабочем полупериоде, а МУС 1 – в полупериоде управления.
При большом сопротивлении в цепи управления переменная составляющая напряжения, наведенная на обмотках wy обмотками wр, создает малый переменный ток, которым можно пренебречь. Тогда по цепи управления протекает только ток Iу. Такой режим работы МУС называется режимом вынужденного намагничивания. В этом случае условия работы каждого МУС аналогичны рассмотренным ранее.
Обычно сопротивление цепи управления мало и для компенсации наводимых на обмотках wy э.д.с. начала и концы обмоток должны соединяться так, как показано на рис. 10.8. Две обмотки управления могут быть заменены одной. При этом для схемы, приведенной на рис. 10.8, а, необходимо изменить направление включения рабочих обмоток wp (см. рис. 10.8).
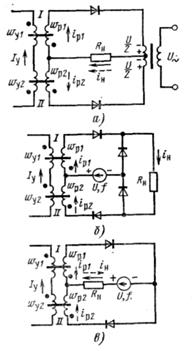
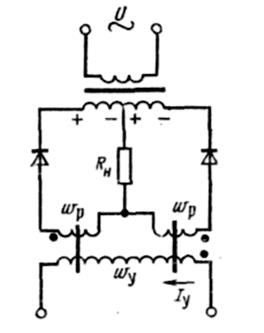



 Рис. 10.8. Схемы двухполупериодных МУС
Рис. 10.8. Схемы двухполупериодных МУС
ПАРАМЕТРЫ МУС
Статические параметры
а) Крутизна характеристики управления. Для МУС характерна зависимость выходного напряжения Up только от  :
:
 (10.8)
(10.8)
Напряжение на нагрузке
 (10.9)
(10.9)
Из (10.8) выходное напряжение Upне зависит от сопротивления рабочей цепи, и при данном токе управления МУС является управляемым источником напряжения. Если  »
»  то U мало зависит от сопротивления нагрузки.
то U мало зависит от сопротивления нагрузки.
Характеристикой управления МУС называется зависимость выходного напряжения от тока управления Up(Iy)или напряжения на нагрузке от тока управления Uн(Iy).
Крутизна характеристики управления
 . (10.10)
. (10.10)
Подставляя в это выражение значение UB,получаем
 (10.11)
(10.11)
Но
 (10.12)
(10.12)
Следовательно,
 . (10.13)
. (10.13)
Производная  характеризует наклон кривой размагничивания магнитопровода МУС и условно может определяться эквивалентной магнитной проницаемостью размагничивания
характеризует наклон кривой размагничивания магнитопровода МУС и условно может определяться эквивалентной магнитной проницаемостью размагничивания  . Введем понятие индуктивного сопротивления размагничивания
. Введем понятие индуктивного сопротивления размагничивания
 (10.14)
(10.14)
Тогда имеем
 . (10.15)
. (10.15)
Таким образом,
 ~
~  (10.16)
(10.16)
б) Коэффициент усиления МУС. Коэффициент усиления по току
 (10.17)
(10.17)
Коэффициент усиления по напряжению
 . (10.18)
. (10.18)
Коэффициент усиления по мощности
 . (10.19)
. (10.19)
ЗАКЛЮЧЕНИЕ
Развитие науки и техники, научно-технические исследования предполагают развитие и совершенствование методов проектирования и расчета существующих, а также разработку новых электрических и электронных аппаратов. Поэтому соотношения и методы, приведенные в данном курсе, не являются неизменными и установившимися.
Конспект лекций охватывает часть курса электрических и электронных аппаратов и предназначен для изучения основ теории, конструкции, принципа действия, принципиальных схем и основных характеристик электрических аппаратов, проведения практических занятий по дисциплине. Кроме того, предлагаемый материал может быть использован для самостоятельной работы студентов дневной и заочной форм обучения.
СПИСОК ЛИТЕРАТУРЫ
Основной
1. Алиев, И.И. Электрические аппараты: справочник / И.И. Алиев, М.Б. Абрамов. – М.: Радио софт, 2004.
2. Чунихин, А.А. Электрические аппараты / А.А. Чунихин. – М.: Энергоатомиздат,CD-ROM, 2005.
3. Родштейн, Л.А. Электрические аппараты / Л.А. Родштейн. – М.: Энергоатомиздат, CD-ROM, 2005.
4. Розанов, Ю.К. Электрические и электронные аппараты / Ю.К. Розанов и др. – М.: Информэлектро, 2001.
5. Буткевич, Г.В. Задачник по электрическим аппаратам / Г.В. Буткевич и др. – М.: Высш. школа, 1977.
6. Буль, Б.К. и др. Основы теории электрических аппаратов: учеб. пособие для электротехнич. специальностей вузов / Под ред. Г.В. Буткевича. – М.: Высш. школа, 1970. – 600 с.
Дополнительный
7. Гольдберг, О.Д. Переходные процессы в электрических машинах и аппаратах, вопросы их проектирования / О.Д. Гольдберг и др. – М.: Высш. школа, 2001.
8. Сахаров, П.В. Проектирование электрических аппаратов / П.В. Сахаров. – М.: Энергия, 1971.
СОДЕРЖАНИЕ
Введение.............................................................................................................. 3
Основы теории электрических аппаратов......................................................... 5
Лекция № 1. Введение. Предмет и задачи. Литература и ГОСТы,
определения и классификация. Состояние и перспективы развития. Области применения, классификация электромагнитов, расчет магнитных полей........................... 5
Лекция №2. Расчет и экспериментальное определение магнитных проводимостей воздушных промежутков............................................................................... 32
Лекция №3. Расчет магнитной цепи электромагнитов постоянного тока, обмоточных данных. Магнитные цепи электромагнитов переменного тока.
Расчет обмоток............................................................................................... 43
Лекция №4. Энергетический баланс электромагнита постоянного тока.
Расчет силы тяги, формула Максвелла. Сила тяги электромагнитов переменного тока. Магнитный демпфер....................................................................................... 62
Лекция №5. Тяговые и механические характеристики электромагнитов постоянного и переменного тока. Динамика электромагнитов, время
трогания и движения. Ускорение и замедление срабатывания.................... 73
Лекция №6. Электродинамические усилия (ЭДУ), методы расчета.
Электродинамическая устойчивость. Нагрев электроаппаратов.
Нормы нагрева, термическая устойчивость.................................................. 94
Лекция №7. Электроконтакты, понятия и теория. Конструкция и выбор
коммутирующих контактов......................................................................... 125
Лекция №8. Электрическая дуга, физические явления, основы горения
и гашения дуги постоянного тока................................................................ 148
Лекция №9. Горения и гашения дуги переменного тока: в условиях
активной деионизации, высокого напряжения, низкого напряжения........ 167
Лекция №10. Магнитные усилители (МУ), дроссельный МУ,
характеристики и режимы работы. МУ с самоподмагничиванием (МУС).
Двухполупериодные схемы МУС................................................................ 176
Заключение...................................................................................................... 188
Список литературы......................................................................................... 188
Основной....................................................................................................... 188
Дополнительный........................................................................................... 188
Учебное издание
ЧЕБОТКОВ Эдуард Галактионович
ЗУБКОВ Юрий Валентинович
Электрические и электронные аппараты
(Ч. I . Основы теории)
Редактор Ю.А. Петропольская
Верстка И.О. Миняева
Выпускающий редактор Н.В. Беганова
Подписано в печать 13.12.10.
Формат 60´84 1/16. Бумага офсетная.
Усл. п. л. 11.16. Уч.-изд. л. 11.13.
Тираж 50 экз. Рег. № 160/10.
 |
Государственное образовательное учреждение
высшего профессионального образования
«Самарский государственный технический университет»
443100, г. Самара, ул. Молодогвардейская, 244. Главный корпус
Отпечатано в типографии
Самарского государственного технического университета
443100, г. Самара, ул. Молодогвардейская, 244. Корпус №8
Дата добавления: 2021-04-24; просмотров: 92; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!