Координатный способ задания движения свободной точки. Скорость. Ускорение.
В координатном способе задания движения точки ее положение определяется тремя декартовыми координатами (x, y, z), которые могут быть выражены в функции параметра времени в виде

рис.1.3.
Эти уравнения являются и уравнениями траектории в параметрической форме. Исключая из этих уравнений параметр t, можно получить три пары систем двух уравнений, каждая из которых представляет траекторию точки, как пересечение поверхностей.
Кроме декартовых могут быть использованы другие системы координат (сферическая, цилиндрическая). Всегда можно перейти от координатного способа задания движения к векторному (рисунок 1.3):
r(t)=i∙x(t) + j∙y(t) + k∙z(t)
Поэтому, используя формулы для определения скорости и ускорения точки при векторном способе задания движения, можно получить аналогичные формулы для координатного способа:

То есть:

Направление вектора скорости определяется с помощью направляющих косинусов:
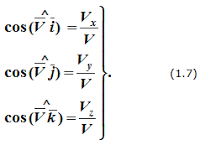
Формулы (1.6) и (1.7) полностью определяют вектор скорости при координатном способе задания движения точки, т.е. по величине и направлению.
Аналогичны формулы для определения ускорения точки:

23. Криволинейные координаты. Задание движения.
Криволине́йные координа́ты, координаты точки на плоскости, на поверхности или в пространстве, отличные от прямолинейных (декартовых) координат.
На плоскости (поверхности) криволинейные координаты определяются при помощи таких двух семейств кривых (координатных линий), что любая кривая одного семейства пересекает любую кривую другого семейства не более чем в одной точке; координатами этой системы считаются соответствующие значения параметров семейств.
|
|
|
Положение точки определяется тремя числами, связанными с прямоугольными координатами х, у, z по формулам

Задать движение точки (системы) — значит дать способ определения положения точки (всех точек, образующих систему) в любой момент времени
Задачи кинематики состоят в разработке способов задания движения точек и методов определения скорости, ускорения и других кинематических величин точек, составляющих механическую систему.
24. Задание движения несвободной точки. Скорость.
Материальные точки, движение которых ограничено связями, называются несвободными.
25. Задание движения несвободной точки. Ускорение
26. Кинематические характеристики тела, вращающегося вокруг неподвижной оси. Угловая скорость. Угловое ускорение.
Движение твердого тела, при котором две его точки О и О' остаются неподвижными, называется вращательным движением вокруг неподвижной оси, а неподвижную прямую ОО' называют осью вращения
|
|
|
Все точки, лежащие на оси так же неподвижны.
Основными кинематическими характеристиками вращательного движения являются угловая скорость и угловое ускорение.
Чтобы определить положение вращающегося тела, вводят две плоскости, проходящие через ось вращения А- плоскость неподвижная; и плоскость В связанная с телом и вращающаяся с ним; ОО - ось вращения, совпадающая с осью z.

| 
|
положение тела будет определяться углом  между плоскостями А и В или углом поворота тела, положительным, если вращение происходит против часовой стрелки, и отрицательным в противном случае.
между плоскостями А и В или углом поворота тела, положительным, если вращение происходит против часовой стрелки, и отрицательным в противном случае.
Закон вращательного движения : 
В технике вращение характеризуют оборотами в минуту n [об/мин]
Угловой скоростью называется векторная величина, характеризующая изменение угла поворота в единицу времени и направление вращения тела вокруг неподвижной оси и равная первой производной от угла поворота по времени (или называется величина, к которой стремится средняя угловая скорость  , если
, если  стремится к нулю.)
стремится к нулю.)
 рад/с, с-1.
рад/с, с-1.
Знак w показывает направление угловой скорости по отношению к направлению угла поворота.
|
|
|
Угловым ускорением называется векторная величина  , характеризующая изменение угловой скорости тела в единицу времени при неравномерном вращении и равная первой производной по времени от его угловой скорости или второй производной по времени от вектора поворота (или Угловым ускорением твердого тела в данный момент времени t называется величина к которой стремится
, характеризующая изменение угловой скорости тела в единицу времени при неравномерном вращении и равная первой производной по времени от его угловой скорости или второй производной по времени от вектора поворота (или Угловым ускорением твердого тела в данный момент времени t называется величина к которой стремится  при стремящемся к нулю)
при стремящемся к нулю)
 , рад/с2, с-2.
, рад/с2, с-2.
Единица углового ускорения - радиан, деленный на секунду в квадрате (рад/с2)
Знак e показывает направление углового ускорения по отношению к направлению угловой скорости.
27. Скорость и ускорение точки тела, вращающегося вокруг неподвижной оси.
Скорость
При вращении твердого тела вокруг неподвижной оси каждая точка тела движется по окружности. Радиус окружности R равен расстоянию от точки до оси вращения.
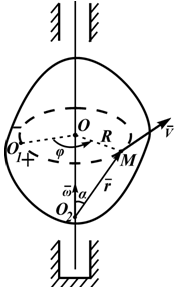
Закон движения точки может быть задан естественным способом : траектория – окружность; начало отсчета точка O1 и положительное направление движения выбраны, длина дуги (дуговая координата) определяется по формуле

Скорость точки определяется выражением
V=dS/dt=d φ ∙R/dt= ω R (2.9)
где ω — угловая скорость вращения твердого тела.
|
|
|
Скорость направлена по касательной к траектории, поэтому можно написать

Вектор скорости можно получить векторным произведением:
V= ω × r,
V= ω × r × sin α = ω ×R.
v - называется линейной или окружной скоростью точки М твердого тела. Направлена линейная скорость по касательной к описываемой точкой М окружности. Линейные скорости пропорциональны их расстояниям от оси вращения

Ускорение
Найдем ускорение произвольной точки М вращающегося тела.
Ускорение точки при естественном способе задания движения определяется как сумма касательного и нормального ускорений (см. вывод формулы


Эти же выражения можно получить, взяв производную от векторного произведения V=ω × r.
Угол, который составляет полное ускорение с радиусом, может быть определен из соотношения (рисунок 2.5)

То есть эти углы для всех точек тела одинаковы и не зависят от их расположения на теле. На этом же рисунке представлены законы распределения скоростей и ускорений точек во вращающемся теле в зависимости от расстояния их до оси вращения. Эти законы распределения соответствуют формулам:

28. Преображение простейших движений
При преобразовании простейших движений (без проскальзывания) соотношения между кинематическими параметрами объектов, совершающих эти движения, могут быть получены, исходя из равенства кинематических параметров тех точек объектов, которые являются либо общими, либо связаны друг с другом.
Существуют следующие основные типы преобразований простейших движений с участием вращательного движения:
Тип ВО (вращательное - общее): вращательное движение вокруг одной и той же неподвижной оси нескольких НМС (таблица 1);
Тип ВП (вращательное - поступательное): передача вращательного движения НМС вокруг неподвижной оси в поступательное движение НМС или в движение точки и обратная передача движения (таблица 2);
Тип ВВ (вращательное - вращательное): передача вращательного движения НМС вокруг неподвижной оси во вращательное движение другого НМС вокруг своей неподвижной оси (таблица 3).
Рассмотренные типы преобразований простейших движений с участием вращательного движения будут использованы в алгоритме решения задач кинематики вращательного движения НМС вокруг неподвижной оси.
Дата добавления: 2020-04-08; просмотров: 128; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!