Отсюда вытекает условие равновесия произвольной пространственной системы сил .
В геометрической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы главный вектор и главный момент системы равнялись нулю
R = 0, M О = 0.
В аналитической форме: для равновесия произвольной пространственной системы сил необходимо и достаточно, чтобы суммы проекций всех сил на три координатные оси и суммы моментов всех сил относительно этих осей были равны нулю
ΣF kx = 0, ΣF ky = 0, ΣF kz = 0,
M x ( F k ) = 0, M y ( F k ) = 0, M z ( F k ) = 0.
Условия равновесия могут быть использованы для решения задач на равновесие при определении неизвестных величин (реакций связей).
Чтобы задача была статически определимой, число неизвестных должно быть не более шести.
В частности, для системы параллельных сил условиями равновесия являются следующие равенства
Σ F kx = 0, M x (F k ) = 0, M y (F k ) = 0.
13. Равновесие тела при наличии трения скольжения.
Если к твердому телу, покоящемуся на шероховатой горизонтальной поверхности, приложить горизонтальную силу F, то действие этой силы вызовет появление силы сцепления F сц = -F, представляющей собой силу противодействия плоскости смещению тела.
Благодаря силе трения тело остается в покое при изменении модуля силы F от нуля до некоторого значения F max.
Модуль силы сцепления также изменяется от 0 до F сц max в момент начала движения. Модуль максимальной силы сцепления пропорционален нормальному давлению N тела на плоскость, т.е. F сц max = f сц N.
|
|
|
Коэффициент пропорциональности f сц является безразмерной величиной и называется коэффициентом сцепления (трения),который зависит от материала и физического состояния соприкасающихся тел и определяется экспериментально.
14. Равновесие тела при наличии трения качения.
(более подробно смотри теорию в др.файле)
При равновесии тела момент сопротивления качению определяется из условий равновесия системы сил. При этом установлено, что момент сопротивления принимает значения от нуля до максимального значения.
Максимальное значение момента сопротивления, соответствующее началу качения, определяется равенством
M С max = Nδ,
где δ – коэффициент трения качения, имеет размерность длины [м], зависит от материала контактирующих тел и геометрии зоны контакта.
Различают:
чистое качение – точка A (рисунок 2.4) не скользит по неподвижной плоскости;
качение со скольжением – наряду с вращением катка присутствует и проскальзывание в месте контакта, т.е. точка A движется по плоскости;
чистое скольжение – каток движется по плоскости без вращения (см. п.2.1).
Для того, чтобы каток не скользил, должно выполняться условие
F тр < F тр max < fN;
|
|
|
Чтобы каток не катился –
M С < M С max = δN.
15. Трение нити о цилиндрическую поверхность.
Рассмотрим нить, переброшенную через цилиндрическую поверхность и касающуюся этой поверхности по дуге, которой соответствует угол α. Если к одному концу нити приложена сила  , то уравновешивающая её сила
, то уравновешивающая её сила  , приложенная к другому концу нити определяется формулой Эйлера
, приложенная к другому концу нити определяется формулой Эйлера
 ,
,
где  - коэффициент трения нити о цилиндрическую поверхность. При отсутствии трения
- коэффициент трения нити о цилиндрическую поверхность. При отсутствии трения  и
и  .
.
Из формулы видно, что увеличивая угол α, т.е. навивая нить, можно значительно уменьшить силу , необходимую для уравновешивания силы . Эта же формула определяет отношение натяжений P ведущей и Q ведомой частей ремня, равномерно вращающего шкив, если проскальзывание ремня по шкиву отсутствует.
Заметим, что величина наименьшей удерживающей силы Q не зависит от радиуса цилиндра.
Пример: Например, при намотке полутора оборотов пенькового каната на неподвижный деревянный цилиндр (  =0.5,
=0.5,  ) отношение минимальной удерживающей силы к силе тянущей равно 0.009.
) отношение минимальной удерживающей силы к силе тянущей равно 0.009.
16. Центр тяжести тела. Методы его нахождения.
Сила тяжести это сила с которой тело притягивается к Земле.
Центр тяжести тела - центр параллельных сил тяжести всех элементарных частиц тела.
|
|
|
Центр тяжести есть геометрическая точка, которая может лежать вне тела (например, кольцо, цилиндр с отверстием).
(для себя) На каждую частицу тела, находящегося вблизи земной поверхности, действует направленная вертикально вниз сила, которую называют силой тяжести. Эти силы образуют поле силы тяжести.
Для тел, размеры которых малы по сравнению с земным радиусом, силы тяжести, действующие на частицы тела, можно считать параллельными друг другу и сохраняющими для каждой частицы постоянное значение при любых поворотах тела. Поле тяжести, в котором выполнены эти два условия, называют однородным полем тяжести.
Равнодействующая G сил тяжести, действующих на частицы данного тела, называется весом тела. По модулю вес тела равен произведению его массы m на ускорение свободного падения g  9.81 м / c2 :
9.81 м / c2 :
G = m · g.
Координаты центра тяжести находят по формулам:
хс = ∑ (Gixi)/ ∑Gi; yс = ∑ (Giyi)/ ∑Gi
где хс , yс - координаты частицы; ∑Gi - сила тяжести всего тела
в случае однородных тел по таким же формулам можно определить координаты центра тяжести объемов, площадей и линий.
МЕТОДЫ:
1) метод симметрии: центр тяжести симметричных фигур находится на оси симметрии;
2) метод разделения: сложные сечения разделяем на несколько простых частей, положение центров тяжести которых легко определить;
3) метод (дополнения) отрицательных площадей: полости (отверстия) рассматриваются как часть сечения с отрицательной площадью.
|
|
|
4)практические методы.
Практические методы:
1) Метод подвешивания. тело подвешивают на нитях или тросах за различные его точки. Направление нити, к которой подвешено тело, каждый раз будет указывать направление силы тяжести, точка пересечения этих направлений будет центром тяжести тела.
2) Метод взвешивания.
(Этот пример для себя- рассказывать не надо) Пусть, например, требуется определить положение центра тяжести шатуна. Подвесим шатун в точке А тросом к неподвижной точке О и обопрем его в точке В на платформу весов (рис.4) так, чтобы шатун занял горизонтальное положение. Пусть при этом сила давления шатуна на платформу (а, следовательно, и реакция N платформы, приложенная к шатуну), найденная в результате взвешивания, оказалась по модулю равной G.
Зная вес Р шатуна, расстояние l между точками А и В, можно найти и расстояние h от точки А до центра С тяжести шатуна. Согласно уравнению равновесия
 откуда
откуда 
 Приведем примеры расположения центров тяжести некоторых плоских однородных фигур.
Приведем примеры расположения центров тяжести некоторых плоских однородных фигур.
- Центры тяжести круглого кольца и круглой пластины (тонкого диска) лежат в их геометрических центрах.
- Центр тяжести параллелограмма (в частности: прямоугольника, квадрата, ромба) лежит на пересечении его диагоналей.
- Центр тяжести треугольника лежит в точке пересечения его медиан.
Эта точка делит каждую медиану в отношении AC : CB = 2 : 1 (см.рис.). - Центр тяжести кругового сектора лежит на его оси симметрии на расстоянии от центра О, равном OC = (2Rsin
 )/(3 ), где угол измеряется в радианах.
)/(3 ), где угол измеряется в радианах.
17. Центр тяжести кругового сектора.
Рассмотрим круговой сектор ОАВ радиуса R с центральным углом 2a (рис.8.7.).
Для определения положения центра тяжести кругового сектора разобьем его на элементарные сектора. Каждый элементарный сектор можно рассматривать как равнобедренный треугольник с высотой равной R. Эта высота является также и медианой. Следовательно, центр тяжести каждого треугольника лежит на расстоянии  R от начала координат О.
R от начала координат О.
Следовательно, центр тяжести сектора совпадает с центром тяжести дуги DE. Тогда окончательно получим, что центр тяжести кругового сектора лежит на оси симметрии на расстоянии от центра
xC= R  .
.
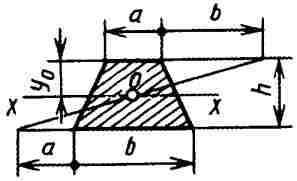
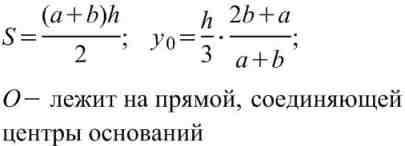
18. центр тяжести трапеции.
Центр тяжести трапеции лежит на прямой, соединяющей центры основания.
19. Центр тяжести дуги окружности
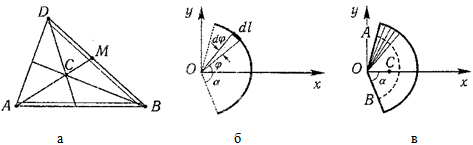
Дуга имеет ось симметрии (рисунок 1.10, б). Центр тяжести лежит на этой оси, т.е.
y C = 0.
dl – элемент дуги, dl = Rdφ, R – радиус окружности, x = Rcosφ, L = 2αR,

Следовательно: x C = R(sinα/α).
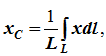
20. Расчет плоских ферм. Метод выделения узлов и метод сечений.
Ферма - геометрически неизменная (жесткая) шарнирно-стержневая конструкция.
Ферма называется плоской, если все стержни фермы лежат в одной плоскости.
Все внешние нагрузки к ферме прикладываются только в узлах.
Весом стержней и трением в шарнирах пренебрегают или распределяют веса стержней по узлам, тогда на каждый из стержней фермы будут действовать две силы (растяжение/сжатие), приложенные к его концам, которые при равновесии могут быть направлены только вдоль стержня. Следовательно, можно считать, что стержни фермы работают только на растяжение или сжатие.
В плоской ферме различают следующие элементы: верхний пояс, нижний пояс, стойки, раскосы, узлы, панели, опорный узел
Определенность или устойчивость фермы отображает зависимость количества узлов и стержней фермы:
Ферма определена, устойчивая, если:
С = 2У - 3 ; где У - число узлов , С - число стержней. Это равенство называется «условием жесткости»
Ферма является неопределенной, т.е. имеет лишние стержни, если:
С > 2У - 3 ;
Ферма неустойчивая и является механизмом (геометрически изменяемая), если:
С < 2У - 3 .
МЕТОДЫ (смотреть обязательно теорию!!!!!-др.файл)
При составлении уравнений равновесия обоими методами предполагается, что все стержни растянуты. Если результат получается со знаком минус, стержень сжат.
Дата добавления: 2020-04-08; просмотров: 271; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!