Связь - гладкая поверхность (опора).
Билеты
1. Сила. Система сил. Уравновешенная система сил. Равновесие твердого тела.
Сила - мера механического взаимодействия материальных тел, в результате которого взаимодействующие тела могут сообщать друг другу ускорения или деформироваться (изменять свою форму). (или еще раз: Сила- величина/ действие одного тела на другое, в результате которого происходит изменение состояния первого тела: изменяется его скорость или тело выходит из состояния покоя.)
Сила— является вектором и определяется:
) численной величиной или модулем,
б) направлением,
в) точкой приложения.
Основные единицы измерения сил:
1 ньютон (н) или 1 килограмм силы (кГ) причем
1кГ = 9,81н (1.2.1)
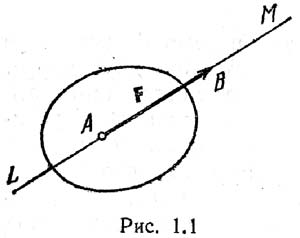
Точка приложения силы и ее направление определяют линию действия силы. На рисунке показано, как сила приложена к точке A. Отрезок AB= модулю силы F. Прямая LM называется линией действия силы. В сист. СИ сила изм. в ньютонах (Н)
Система сил- совокупность нескольких сил (F1, F2, ... ,Fn), приложенных к телу.
Плоская система сил - линии действия сил лежат в одной плоскости.
Пространственная система сил - линии действия сил лежат в разных плоскостях.
Эквивалентная система сил - Если, не нарушая состояния тела, одну систему сил (F1, F2, ..., Fn) можно заменить другой системой (Р1, P 2 , ... , Pn) и наоборот, то такие системы сил называются эквивалентными.
Символически это обозначается следующим образом: ( F 1 , F 2 , ... , Fn )~ (Р1, P 2 , ... , Pn).
|
|
|
Уравновешенная система сил — Система сил, которая, будучи приложенной к свободному твердому телу, находящемуся в покое, не выводит его из этого состояния.
2. Аксиомы статики и их следствия.
Аксиомы (законы) статики:
1) аксиома инерции: Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно.
2) аксиома равновесия двух сил: Две силы, приложенные к абсолютно твердому телу, будут уравновешены тогда и только тогда, когда они равны по модулю, действуют по одной прямой и направлены в противоположные стороны.
3) аксиома присоединения и исключения уравновешивающихся сил: Действие системы сил на абс. твердое тело не изменится, если к ней прибавить или отнять уравновешенную систему сил.
Следствие: Действие силы на абс.тв. тело не изменится, если перенести точку приложения силы вдоль ее линии действия. Т.е. сила, приложенная к абс.тв. телу– скользящий вектор.
4) аксиома параллелограмма сил: Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах.
5) аксиома равенства действия и противодействия (3-й закон Ньютона): Всякому действию соответствует равное и противоположно направленное противодействие.
|
|
|
6) принцип отвердевания: Равновесие сил, приложенных к нетвердому телу, не нарушается при его затвердевании.
Следствия:
1. При переносе силы вдоль её линии действия, действие этой силы на тело не меняется.
2. Сумма всех внутренних сил равна нулю.
3. Активные силы и реакции связей
Силы, действующие на любое тело можно разделить на активные (проще говоря это инициатор) и пассивные или реактивные (это ответ на воздействие).
(например: груз лежит на столе, стол неподвижен, под действием силы тяжести - силой собственного веса груз давит на поверхность стола, но поверхность стола давит в свою очередь на груз с силой, равной весу груза)
Активные силы – стремятся вызвать перемещение тела в пространстве, а пассивные (реактивные) силы препятствуют этому перемещению.
Все законы и теоремы статики справедливы для свободного твердого тела.
Все тела делятся на свободные и связанные (несвободные).
Свободные тела - тела, перемещение которых не ограничено.
Связанные (несвободные) тела - тела, перемещение которых ограничено другими телами.
Тела, ограничивающие перемещение других тел называются связями.
Силы, действующие от связей и препятствующие перемещению, называются Реакциями связей
Реакция связи всегда направлена с той стороны, куда нельзя перемещаться.
Всякое связанное тело можно представить свободным, если связи заменить их реакциями (принцип освобождения от связей).
|
|
|
Реакция связи направлена в сторону, противоположную той, куда Связь не дает перемещаться Телу.
наиболее распространенные виды связей:
Связь - гладкая поверхность (опора).
Гладкая поверхность – это такаяповерхность (опора), трением о которую данного тела можно пренебречь.
Реакция опоры приложена в точке опоры и всегда направлена перпендикулярно опоре.

Гибкая связь (нить, веревка, трос, цепь). Груз подвешен на нити.
Реакция нити направлена вдоль нити от тела, при этом нить может быть только растянута.

Шарнирная опора.
Шарнир допускает поворот вокруг точки закрепления. Различают два вида шарниров.
Подвижный шарнир.
Стержень, закрепленный на шарнире, может поворачиваться
вокруг шарнира, а точка крепления может перемещаться вдоль направляющей.
Реакция подвижного шарнира направлена перпендикулярно опорной
поверхности т.к. не допускается только перемещение поперек опорной
поверхности
|
|
|
Неподвижный шарнир.
Точка крепления перемещаться не может. Стержень может свободно поворачиваться вокруг оси шарнира. Реакция такой опоры проходит через ось шарнира, но неизвестна по направлению. Ее принято изображать в виде двух составляющих: горизонтальной и вертикальной (Rx; Ry).

Защемление или «заделка»
Заделка одного тела в другое (например, стержня в неподвижную стену) не позволяет данному телу перемещаться и поворачиваться относительно другого.
Любые перемещения точки крепления невозможны, под действием внешних сил в опоре возникают реактивная сила и реактивный момент MR, препятствующий повороту. Реактивную силу принято представлять в виде двух составляющих вдоль осей координат.
Проекция силы на ось
Проекция силы на ось определяется отрезком оси, отсекаемым перпендикулярами, опушенными на ось из начала и конца вектора
Fx =Fcos a
Величина проекции силы на ось равна произведению модуля силы на косинус угла между вектором силы и положительным направлением оси. Таким образом, проекция имеет знак: положительный при одинаковом направлении вектора СИЛЫ и ОСИ и отрицательный при направлении в сторону отрицательной полуоси

4. Система сходящихся сил. Равнодействующая. Условия равновесия тела.
Система сил, линии действия которых пересекаются в одной точке, называется системой сходящихся сил (на плоскости).
Точка пересечения линий действия сил называется точкой сходимости.
Сложение сходящихся силСложить две или несколько сил - это значит заменить эти силы одной силой, им эквивалентной (равной), т.е. найти их равнодействующую.Действие системы сходящихся сил F1, F2, ..., Fn на тело эквивалентно действию одной силы R, которая называется равнодействующей:
R = F1 + F2 + ... + Fn = SFk. (k = 1, 2, .., n)

Равнодействующая R приложена в точке сходимости О и является замыкающим вектором при построении силового многоугольника.
Найти равнодействующую можно также, построив половину параллелограмма - треугольник сил, в котором равнодействующая является замыкающей стороной


Для равновесиятвердого тела, находящегося под действием сходящейся системы сил, необходимо и достаточно, чтобы равнодействующая этих сил была равна нулю:
F1 + F2 + ... + Fn = 0.
Геометрическим условием равновесия твердого тела, находящегося под действием сходящейся системы сил F1 + F2 + ... + Fn является замкнутость силового многоугольника, т. е. начало первого вектора F1 должно совпадать с концом последнего Fn.
Аналитические условия равновесия. При равновесии системы сил модуль равнодействующей R = [Rх2 + Rу2]1/2 = 0, поэтому Rх = SFkх = 0, Rу = SFky = 0.
Для равновесия плоской системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на оси прямоугольной системы координат Оху были равны нулю:
SFkх = 0, SFky = 0. (k = 1, 2, ..., n) 
Дата добавления: 2020-04-08; просмотров: 203; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!