Варианты курсового задания К 2
«Определение скоростей и ускорений точек твёрдого тела при поступательном и вращательном движениях»
Для закрепления теоретического материала, изложенного в данной теме, необходимо выполнить курсовое задание К 2. По условию этого задания требуется определить скорость и ускорение точки М одного из колёс механизма в момент времени t1 (VM(t1) = ?;  (t1) = ?;
(t1) = ?;  (t1) = ?
(t1) = ?  (t1) = ?).
(t1) = ?).
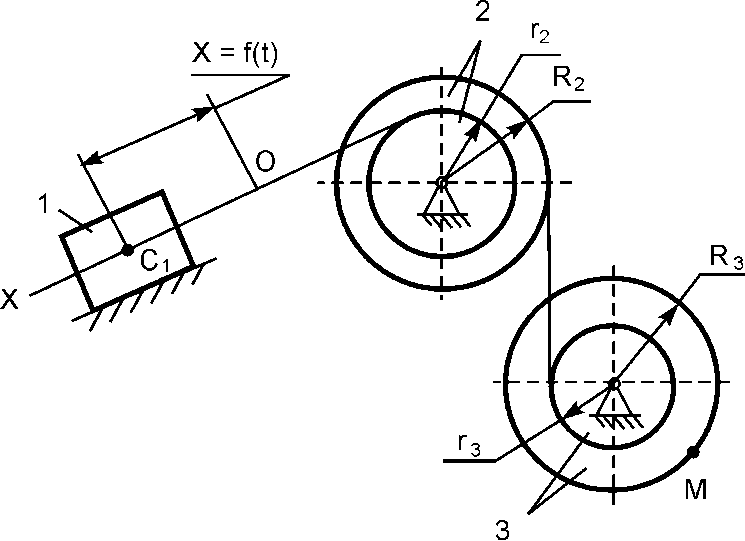
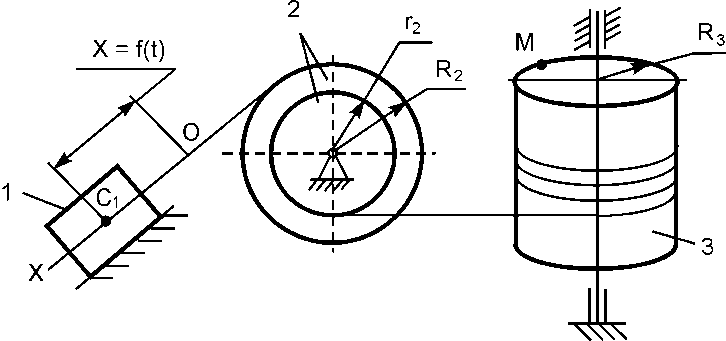
Схемы механизмов показаны на рисунках, а необходимые данные приведены в табл. 2.2.
Таблица 2.2
| Номер варианта | Расчётная схема механизма | Исходные данные для расчёта |
| 1 | 2 | 3 |
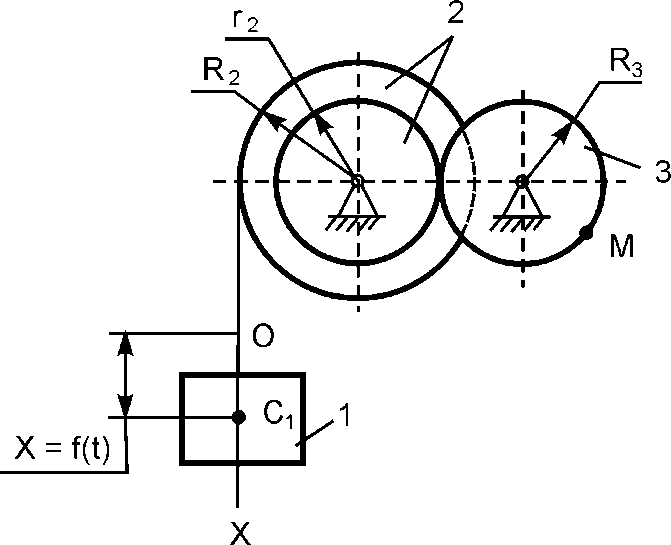
| 1 |

| Х = 15·t2·+ 12·t + 2, см; R2 = 60 см; r2 = 45 см; R3 = 36 см; t1 = 2 c |
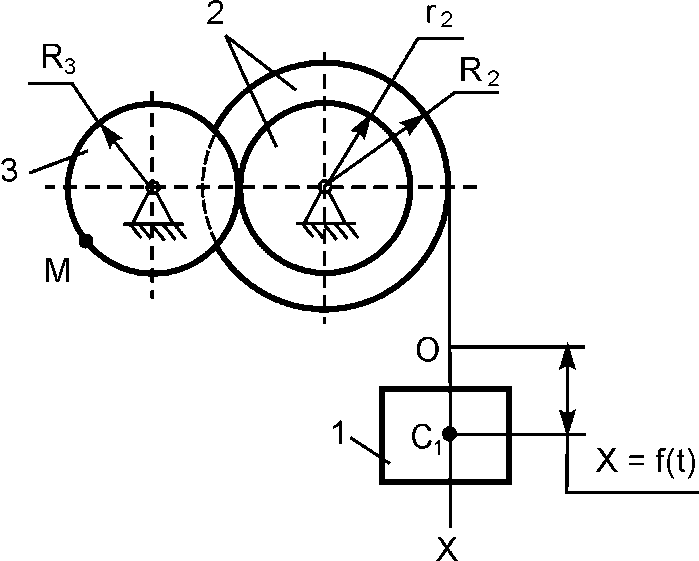
| 2 |

| Х = 4·t2·+ 10·t + 5, см; R2 = 80 см; R3 = 60 см; r3 = 45 см; t1 = 1 c |
Продолжение табл. 2.2
| 1 | 2 | 3 |
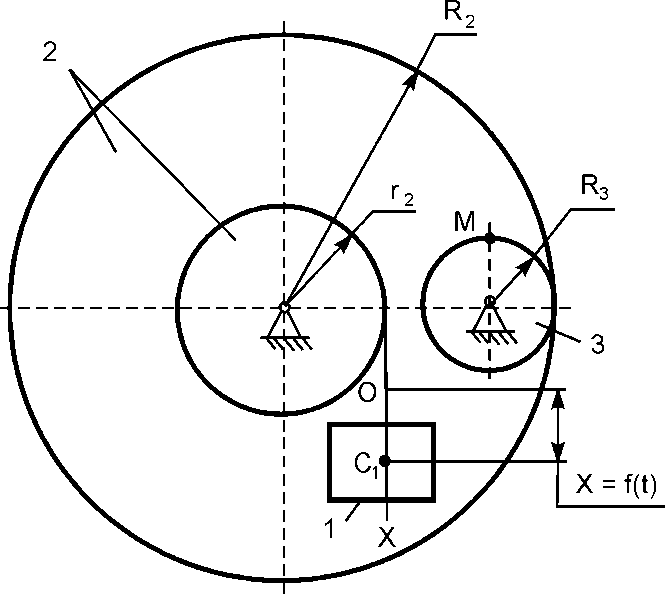
| 3 |
| Х = 0,5 t2 + 6·t + 8, см; R2 = 100 см; r2 = 60 см; R3 = 75 см; t1 = 2 c |
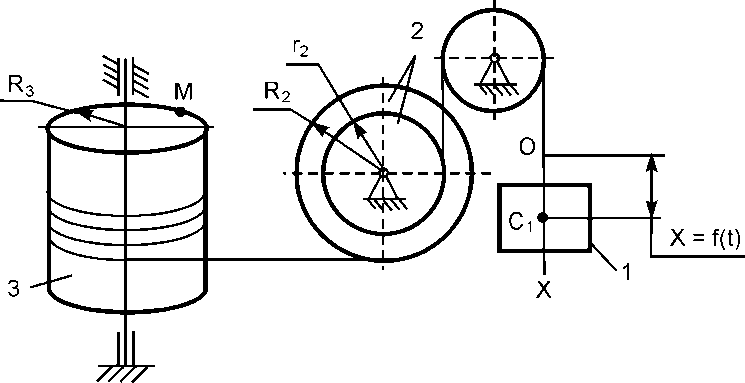
| 4 |
| Х = 9,5·t2·+ 4·t + 4, см; R2 = 58 см; r2 = 45 см; R3 = 40 см; t1 = 3 c |
| 5 |

| Х = 6·t2 + 15·t + 3, см; R2 = 45 см; r2 = 30 см; R3 = 80 см; t1 = 2 c |
Продолжение табл. 2.2
| 1 | 2 | 3 |
| 6 |

| Х = 9·t2 + 16·t + 7, см; R2 = 100 см; r2 = 45 см; R3 = 50 см; t1 = 2 c |
| 7 |

| Х = 15·t2 + 12·t + 2, см; R2 = 45 см; r2 = 35 см; R3 = 105 см; t1 = 3c |
| 8 |
| Х = 11·t2 +10·t + 10, см; R2 = 35 см; r2 = 15 см; R3 = 10 см; t1 = 2 c |
Продолжение табл. 2.2
|
|
|
| 1 | 2 | 3 |
| 9 |

| Х = 7·t2 + 3·t + 5, см; R2 = 60 см; r2 = 45 см; R3 = 20 см; t1 = 1 c |
| 10 |

| Х = 6·t2 + 7·t + 10, см; R2 = 60 см; r2 = 45 см; R3 = 16 см; t1 = 1 c |
| 11 |

| Х = 10·t2 + 8·t + 9, см; R2 = 40 см; r2 = 25 см; R3 = 20 см; t1 = 1c |
Продолжение табл. 2.2
| 1 | 2 | 3 |
| 12 |

| Х = 16·t2 + 10·t + 5, см; R2 = 20 см; r2 = 15 см; R3 = 10 см; t1 = 2 c |
| 13 |

| Х = 22·t2 + 7, см; R2 = 30 см; r2 = 20 см; R3 = 40 см; t1 = 2 c |
| 14 |

| Х = 17·t2 + 3·t + 6, см; R2 = 30 см; r2 = 20 см; R3 = 15 см; t1 = 1 c |
Продолжение табл. 2.2
| 1 | 2 | 3 |
| 15 |

| Х = 11·t2 + 2·t + 5, см; R2 = 15 см; r2 = 10 см; R3 = 15 см; t1 = 2 c |
| 16 |

| Х = 12·t2 + 6·t + 4, см; R2 = 40 см; r2 = 20 см; R3 = 16 см; t1 = 3 c |
| 17 |

| Х = 7·t2 + 4·t + 8, см; R2 = 15 см; r2 = 10 см; R3 = 15 см; t1 = 1 c |
Продолжение табл. 2.2
| 1 | 2 | 3 |
| 18 |

| Х = 18·t2 + 10·t + 5, см; R2 = 30 см; r2 = 20 см; R3 = 30 см; t1 = 2 c |
| 19 |

| Х = 18·t2 + 10·t + 5, см; R2 = 30 см; r2 = 20 см; R3 = 30 см; t1 = 2 c |
| 20 |

| Х = 27·t2 + 8·t + 10, см; R2 = 40 см; r2 = 20 см; R3 = 45м; t1 = 1 c |
|
|
|
Продолжение табл. 2.2
| 1 | 2 | 3 |
| 21 |

| Х = 13·t2 + 5·t + 6, см; R2 = 60 см; r2 = 45 см; R3 = 70 см; r3 = 40 см; t1 = 2 c |
| 22 |
| Х = 21·t2 + 6·t + 7, см; R2 = 40 см; r2 = 20 см; R3 = 36 см; t1 = 1 c |
| 23 |
| Х = 18·t2 + 9·t + 5, см; R2 = 60 см; r2 = 45 см; R3 = 40 см; r3 = 25 см; t1 = 1 c |
Продолжение табл. 2.2
| 1 | 2 | 3 |
| 24 |

| Х = 4·t2 + 8·t + 9, см; R2 = 60 см; r2 = 45 см; R3 = 80 см; r3 = 50 см; t1 = 1 c |
| 25 |
| Х = 11·t2 + 4·t + 8, см; R2 = 60 см; r2 = 45 см; R3 = 50 см; t1 = 1 c |
| 26 |

| Х = 50·t2 + 14·t + 6, см; R2 = 60 см; r2 = 45 см; R3 = 60 см; r3 = 45 см; t1 = 1 c |
| 27 |

| Х = 42·t2 + 10·t + 5, см; R2 = 60 см; r2 = 45 см; R3 = 70 см; r3 = 40 см; t1 = 1 c |
Окончание табл. 2.2
| 1 | 2 | 3 |
| 28 |

| Х = 36·t2 + 5·t + 8, см; R2 = 60 см; r2 = 45 см; R3 = 70 см; r3 = 45 см; t1 = 1 c |
| 29 |

| Х = 4·t2 + 6·t + 4, см; R2 = 60 см; r2 = 45 см; R3 = 55 см; r3 = 45 см; t1 = 2 c |
| 30 |

| Х = 26·t2 + 7·t + 10, см; R2 = 60 см; r2 = 45 см; R3 = 55 см; t1 = 1 c |
Пример выполнения курсового задания К 2
Дано: схема плоского механизма (рис. 2.25); уравнение движения груза 1: Х = 2·t2 + 2, см; радиусы колес: R2 = 50 см; r2 = 30 см; R3 = 60 см; r3 = 40 см. Определить кинематические характеристики точки М тела 3 в момент времени t1 = 1 c (VM(t1) = ?; (t1) = ?; (t1) = ? (t1) = ?).
|
|
|
 Рис. 2.25
Рис. 2.25
|
Решение. В начальный момент времени при t0 = 0 координата X(t0) = 2·(t0)2 + 2 = 2·02 + 2 = 2 см. Дифференцированием по времени уравнения движения груза 1 найдем проекцию  скорости его центра масс на ось ОХ:
скорости его центра масс на ось ОХ:
 =
=  = dX/dt = d(2t2 + 2)/dt = 4·t.
= dX/dt = d(2t2 + 2)/dt = 4·t.
Так как  = 4·t> 0, то = V и, следовательно, координата Х = f(t) с течением времени увеличивается. Для графического построения определяемых кинематических характеристик изобразим механизм в произвольный момент времени t (рис. 2.26).
= 4·t> 0, то = V и, следовательно, координата Х = f(t) с течением времени увеличивается. Для графического построения определяемых кинематических характеристик изобразим механизм в произвольный момент времени t (рис. 2.26).
Так как груз 1 и участок АВ нити совершают поступательные движения, то справедливо равенство VB = V.
Точка В принадлежит телу 2, совершающему вращательное движение в системе отсчёта C2X2Y2Z2, поэтому модуль скорости этой точки определится из формулы VB = ω2·BC2 = ω2·r2 = I  I·r2, где ω2 – модуль угловой скорости
I·r2, где ω2 – модуль угловой скорости  тела 2. Согласно рис. 2.26 вращение тела 2 происходит против хода часовой стрелки. Определим модуль ω2 угловой скорости тела 2 по формуле ω2 = VB/r2 = V/r2. По известному модулю ω2 угловой скорости тела 2 определяется модуль VC скорости точки С тела 2:
тела 2. Согласно рис. 2.26 вращение тела 2 происходит против хода часовой стрелки. Определим модуль ω2 угловой скорости тела 2 по формуле ω2 = VB/r2 = V/r2. По известному модулю ω2 угловой скорости тела 2 определяется модуль VC скорости точки С тела 2:
|
|
|
 Рис. 2.26
Рис. 2.26
|
VC = ω2·CC2 = ω2·R2 = (V/r2)·R2 = V·(R2/r2).
Так как участок нити CD совершает поступательное движение, то справедливо равенство VC = VD = V·(R2/r2). С другой стороны, точка D принадлежит колесу 3. Исходя из условия принадлежности этой точки телу 3, имеем VD = ω3·R3 = V·(R2/r2), где ω3 – модуль угловой скорости  тела 3. Тело 3 осуществляет вращение в направлении хода часовой стрелки. Его угловая скорость вычисляется по формуле
тела 3. Тело 3 осуществляет вращение в направлении хода часовой стрелки. Его угловая скорость вычисляется по формуле
= ·(R2/(r2·R3)) = (4·t)·(R2/(r2·R3)).
По известной угловой скорости тела 3, находят его угловое ускорение  .
.
= d /dt = 4·(R2/(r2·R3)) = const > 0.
Так как > 0 и  = const> 0, то происходит равноускоренное вращение тела 3. Определяем кинематические характеристики точки М тела 3 в момент времени (t1).
= const> 0, то происходит равноускоренное вращение тела 3. Определяем кинематические характеристики точки М тела 3 в момент времени (t1).
Модуль угловой скорости
ω3(t1) = I (t1)I = (4·t1)·(R2/(r2·R3)).
Модуль углового ускорения
ε3(t1) = = 4·(R2/(r2·R3)).
Модуль скорости точки М равна
VM(t1) = ω3(t1)·MC3 = ω3(t1)·r3 = (4·t1)·(R2·r3/(r2·R3)).
Модуль центростремительного ускорения точки М
(t1) = (ω3(t1))2·MC3 = (ω3(t1))2·r3 = (4·t1·(R2/(r2·R3)))2·r3.
Модуль вращательного ускорения равен
(t1) = ε3(t1)·r3 = 4·(R2·r3/(r2·R3)).
Модуль полного ускорения точки М
 .
.
Произведём вычисления для момента времени t1 = 1 c и полученные значения сведём в таблицу.
Таблица
| ω3(t1), рад/с | ε3(t1), рад/с2 | VM(t1), см/с | (t1), см/с2
| (t1), см/с2
| (t1), см/с2
|
| 1,111 | 1,111 | 44,444 | 49,382 | 44,444 | 66,434 |
Кинематические характеристики точки М показаны на рис. 2.26.
Дата добавления: 2020-04-25; просмотров: 557; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!