Координатный способ задания движения точки
Рассматривается движение точки М в неподвижной системе отсчёта OXYZ (рис. 2.1). Единичные векторы (орты) i , j , k показывают положительные направления отсчёта координат X, Y, Z. Движущаяся точка описывает в пространстве некоторую линию, которую называют траекторией движения точки. По виду траектории все движения точки делятся на прямолинейные и криволинейные. Положение точки М в неподвижной системе отсчёта (НСО) определяется тремя координатами X, Y, Z. При движении точки М её координаты изменяются с течением времени. Следовательно, коорди
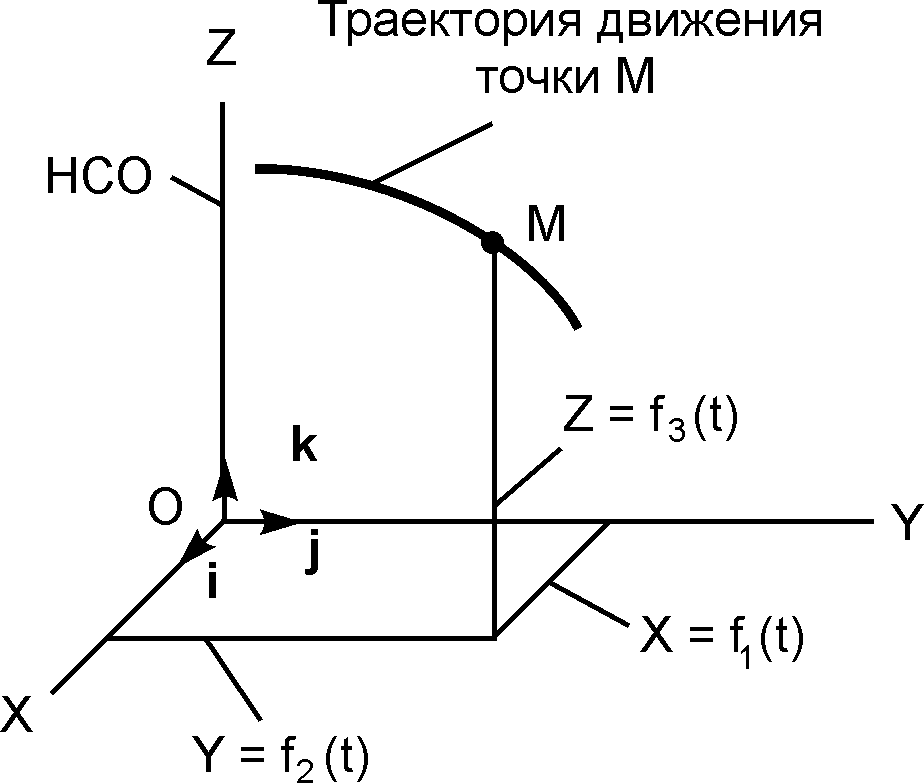 Рис. 2.1
Рис. 2.1
|
наты X, Y, Z движущейся точки М являются функциями времени t.
Систему трёх уравнений X = f1(t); Y = f2(t); Z = f3(t) называют уравнениями движения точки в пространстве в декартовых координатах.
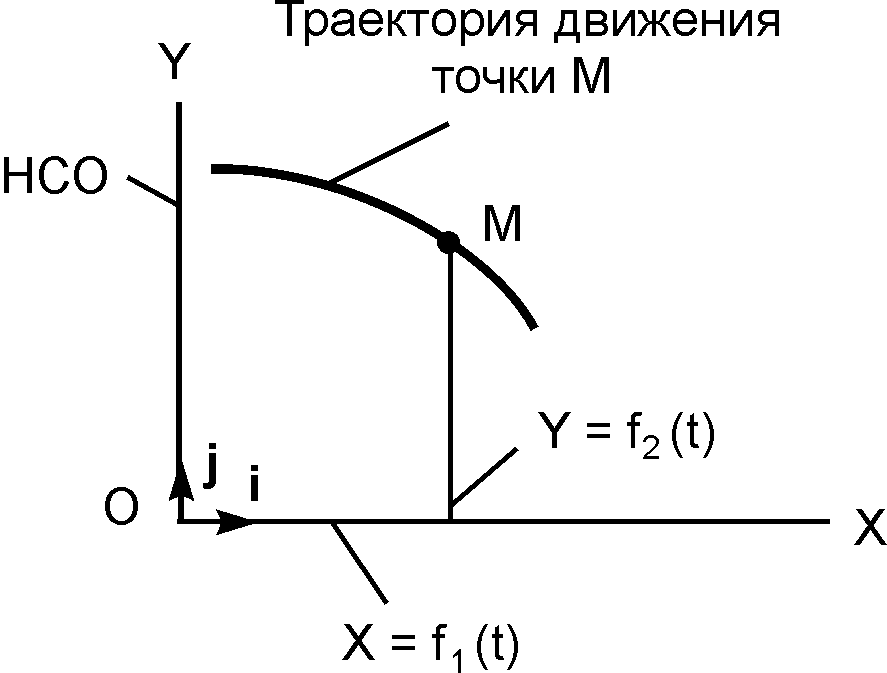 Рис. 2.2
Рис. 2.2
|
Пример: X = 10·t2 + 1; Y = 7·t3 + t2 + 1; Z = 10·sin(·t). Действительно, имея эти уравнения, можно для любого момента времени найти значения соответствующих координат X, Y, Z и по ним определить положение точки в пространстве в этот момент времени.
Движение точки М на плоскости (рис. 2.2) определяется двумя уравнениями: X = f1(t); Y = f2(t). Эти выражения называют уравнениями движения точки на плоскости в декартовой системе отсчёта.
Пример. Заданы уравнения движения точки в плоскости OXY. X = 3·t2 + t2 + t; Y = 7·cos(·t).
Уравнения движения, определяющие координаты точки в любой момент времени, рассматривают как параметрические уравнения траектории точки. При исключении параметра t из уравнений движения получают уравнение траектории точки в координатной форме (Y = f(t)).
|
|
|
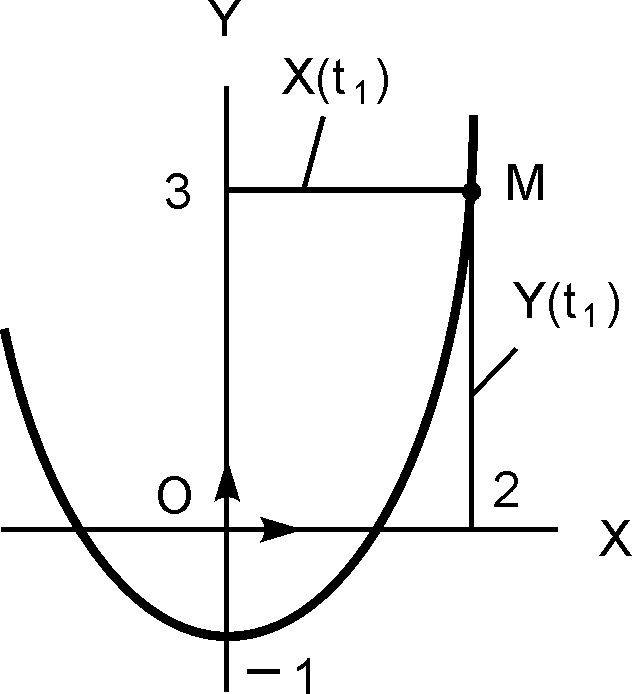 Рис. 2.3
Рис. 2.3
|
Пример. Заданы уравнения: X = 4·t (см); Y = 16·t2 – 1 (см) движения точки в плоскости OXY. Определить вид траектории движения точки, построить её график и найти положение точки на траектории движения в момент времени t1 = 0,5 с.
Решение. Из уравнения X = 4·t находим t = X/4. Значение времени t подставляем в уравнение Y = 16·t2 – 1. Получаем
Y = 16·(X/4)2 – 1 = X2 – 1.
Выражение Y = X2 – 1 есть уравнение параболы (y = a · x 2 + b · x + c) с вершиной в точке с координатами (0, – 1). В момент времени t1 = 0,5 с определяем координаты:
X(t1) = 4·t1 = 4·0,5 = 2 см > 0;
Y(t1) = 16·(t1)2 – 1 = 16·(0,5)2 – 1 = 3 см >0.
Показываем положение точки на траектории её движения (рис. 2.3).
Пример. Дано: X = 3·sin(·t), см (1); Y = 3·cos(·t), см (2); t1 = 0,25 c. Определить вид траектории движения точки и её положение на траектории движения в момент времени t1.
Решение. Уравнения движения точки представим в следующем виде: (X)2 = (3·sin(·t))2 (1I); (Y)2 = (3·cos(·t))2 (2I). Для решения используем тригонометрическую формулу sin2(α) + cos2(α) = 1.
Складывая левые и правые части уравнений (1I) и (2I), получим (X)2 + (Y)2 = 32·(sin2(·t) + cos2(·t)) = 32·1 или (X)2 + (Y)2 = 32. Известно, что уравнение (X)2 + (Y)2 = R2 есть уравнение окружности радиусом R с центром в начале координат. Таким образом, точка
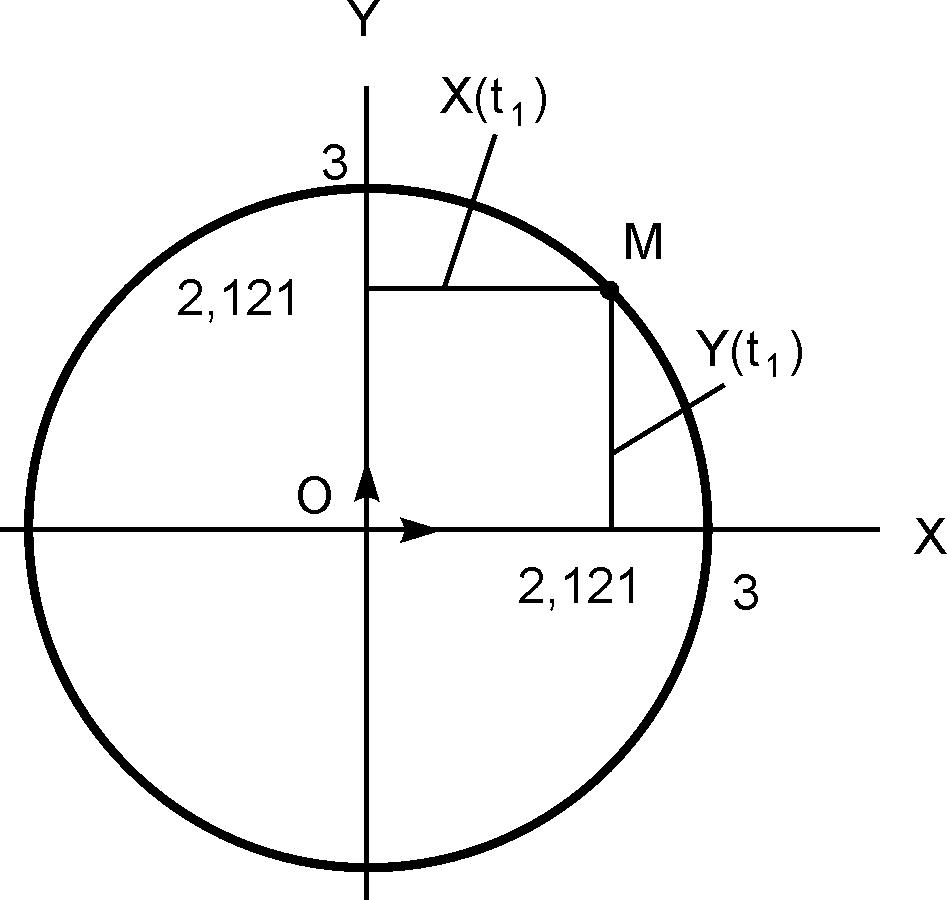 Рис. 2.4
Рис. 2.4
|
движется по окружности радиусом R = 3 см (рис. 2.4).
|
|
|
Определяем положение точки на траектории движения в момент времени t1.
X(t1) = 3·sin(·t1) = 3·sin(·0,25) = 3·0,707 = 2,121 см> 0.
Y(t1) = 3·cos(·t1) = 3·cos(·0,25) = 3·0,707 = 2,121 см> 0.
Показываем точку на траектории её движения (см. рис. 2.4).
ВНИМАНИЕ! Если точка не попадает на траекторию её движения, то:
1) неверно определен вид траектории движения;
2) неверно рассчитаны значения координат X(t1), Y(t1).
Прямолинейное движение точки М определяется одним уравнением движения X = f(t).
Пример. Дано: X = 10·t2 + sin(2··t) + 3, см (рис. 2.5).
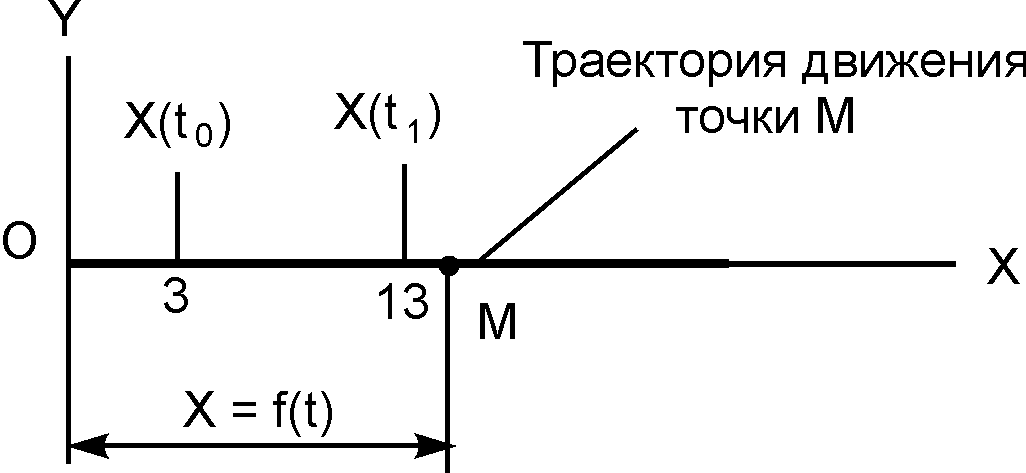 Рис. 2.5
Рис. 2.5
|
Определить положение точки на траектории движения в начальный момент времени t0 = 0 и в момент времени t1 = 1 c.
Решение.
X(t0) = 10·(t0)2 + sin(2··t0) + 3 = 10·02 + sin(2··0) + 3 = 3 см > 0.
X(t1) = 10·(t1)2 + sin(2··t1) + 3 = 10·12 + sin(2··1) + 3 = 13 см> 0.
Значения координат X(t0), X(t1) наносим на рис. 2.5.
Скорость точки
Скорость – векторная величина, характеризующая быстроту и направление движения точки в данной системе отсчёта.
Скорость точки всегда направлена по касательной к траектории её движения.
|
|
|
 Рис. 2.6
Рис. 2.6
|
Разложим вектор V скорости точки на составляющие по координатным осям: V = VOX + VOY + VOZ. Векторы VOX, VOY, VOZ называют компонентами скорости по координатным осям. Вектор Vскорости можно выразить векторным равенством:
V = i·  + j·
+ j·  + k·
+ k·  ,
,
где , ,  – проекции скорости V на соответствующие координатные оси.
– проекции скорости V на соответствующие координатные оси.
В инженерных расчётах рекомендуется использовать следующие обозначения проекций скорости V на координатные оси: ; ; .
Сравнивая последние формулы, запишем равенство
V = VOX + VOY + VOZ = i· + j· + k· .
Из этого равенства имеем:
VOX = i· ; VOY = j· ; VOZ = k· .
Проекции скорости на координатные оси системы отсчёта равны первым производным по времени от соответствующих уравнений движения:
 = dX/dt;
= dX/dt;  = dY/dt; = dZ/dt,
= dY/dt; = dZ/dt,
где точка (·) означает символ однократного дифференцирования функции по времени.
Зная проекции скорости на координатные оси, находят модуль скорости по формуле
 .
.
Ориентацию вектора скорости V в системе отсчёта OXYZ определяют по направляющим косинусам:
cos(V, i) = / V; cos(V, j) = / V; cos(V, k) = / V.
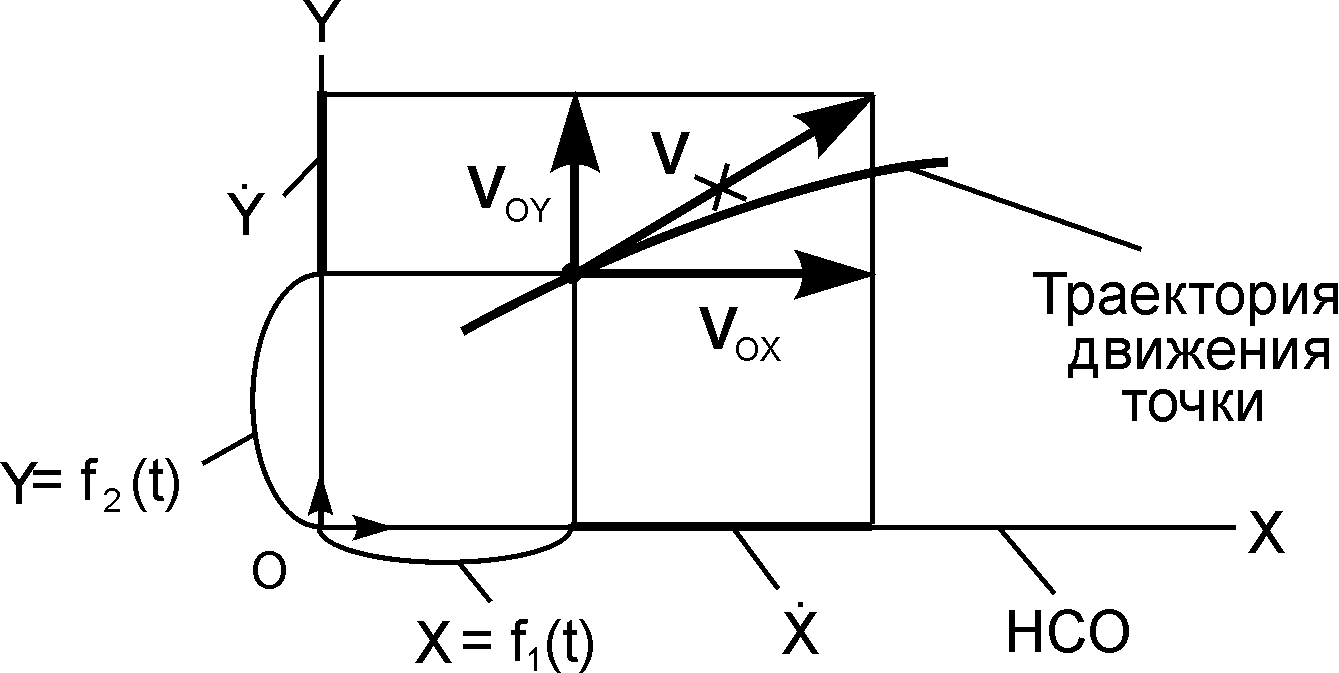 Рис. 2.7
Рис. 2.7
|
|
|
|
Модуль и направление скорости точки в этом случае определяются по формулам:
 ;
;
 cos(V, i) = / V; cos(V, j) = / V.
cos(V, i) = / V; cos(V, j) = / V.
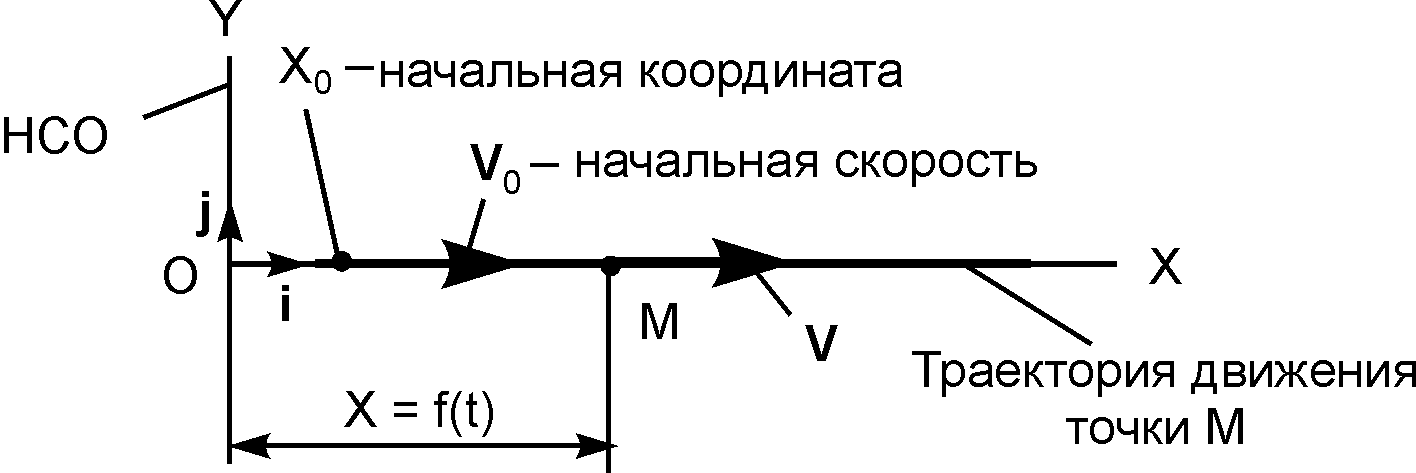 Рис. 2.8
Рис. 2.8
|
Прямолинейное движение точки (рис. 2.8) задаётся одним уравнением X = f(t).
В этом случае модуль скорости точки равен абсолютной величине проекции скорости на координатную ось ОХ.
V = | | = |dX/dt|.
При > 0 точка движется в сторону увеличения координаты Х, при < 0 – противоположно направлению оси.
Ускорение точки
Ускорение – векторная величина, характеризующая быстроту изменения величины и направления скорости.
Ускорение всегда направлено в сторону вогнутости траектории движения.
Рассматривается движение точки на плоскости в системе отсчёта OXY (рис. 2.9) по заданным уравнениям движения X = f1(t); Y = f2(t).
Согласно рис. 2.9 запишем векторное равенство
а = аОХ+ aOY = i·  + j·
+ j·  ,
,
где а – ускорение точки; аОХ,aOYкомпоненты ускорения по координатным осям; ,  – проекции ускорения на координатные оси.
– проекции ускорения на координатные оси.
Здесь две точки (··) означает символ двойного дифференцирования функции по времени.
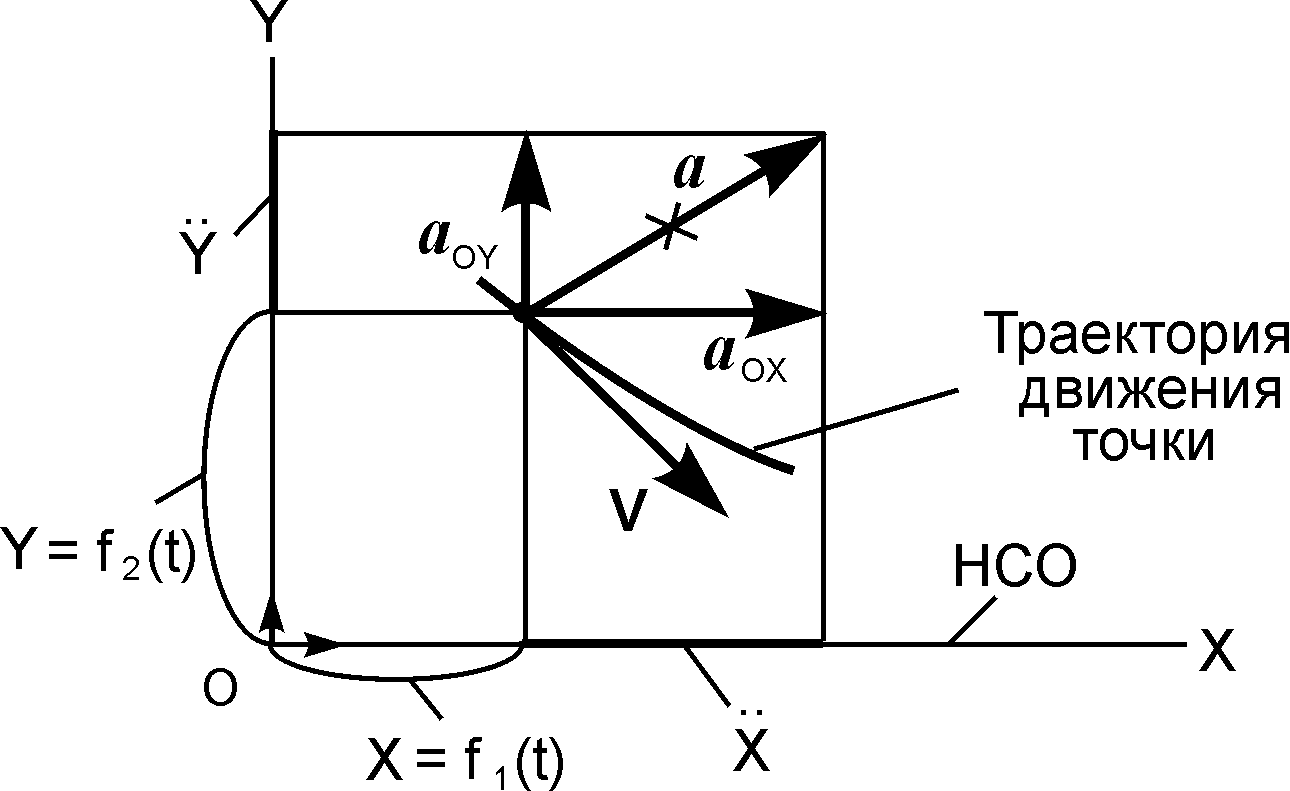 Рис. 2.9
Рис. 2.9
|
Распространяя полученный результат на пространство (система отсчёта OXYZ), получим
а=аОХ +aOY+aOZ=i· + j· + j·  .
.
Как правило, проекции ускоренияа на координатные оси в технической литературе обозначаются так: , , .
Проекции ускорения точки на координатные оси равны вторым производным по времени от соответствующих уравнений движения или первым производным по времени от проекций скорости на соответствующие оси.
 = d2X/dt2=
= d2X/dt2=  ;
;
 = d2Y/dt2=
= d2Y/dt2=  ;
;
 = d2Z/dt2=
= d2Z/dt2=  .
.
Модуль ускорения находится по следующим формулам:
a=  (точка движется в пространстве);
(точка движется в пространстве);
a =  (точка движется в плоскости);
(точка движется в плоскости);
a =|  |(точка движется по прямой линии).
|(точка движется по прямой линии).
Направляющие косинусы находятся по следующим формулам:
cos(a, i) = / a; cos(a, j) = / a; cos(a, k) = / a.
Зная направляющие косинусы, вектор ускорения а ориентируют в пространстве.
Рассматривается движение точки по прямой линии согласно заданному уравнению движения X = f(t) (рис. 2.10).
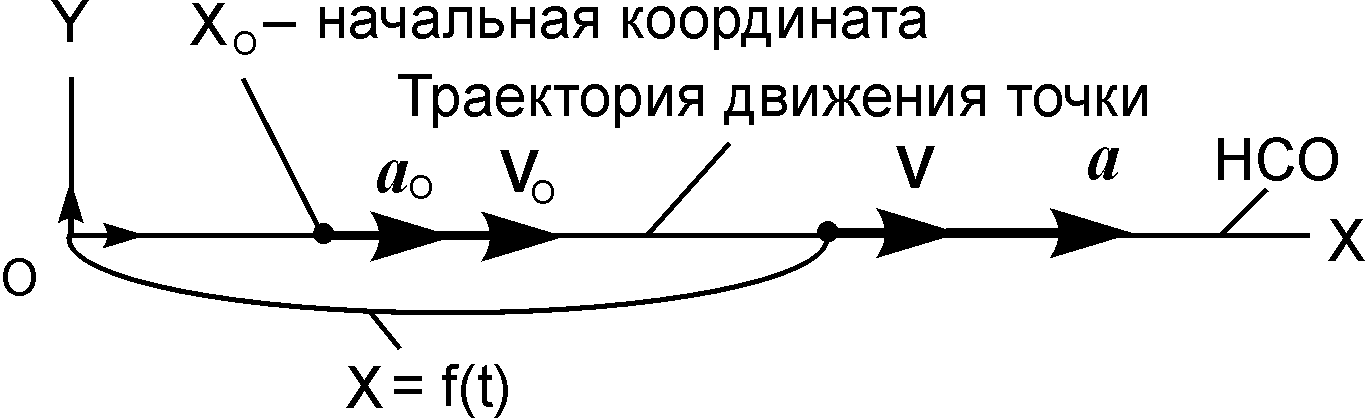 Рис. 2.10
Рис. 2.10
|
При таком движении справедливо равенство а = аОХ =i· . На рис. 2.10 дополнительно показано ускорение а0–начальное ускорение точки при t0 = 0.
Примечания:
1. Если проекции ускорения на координатные оси положительны (  > 0,
> 0,  > 0,
> 0,  > 0), то компоненты ускорения по координатным осям (аОХ,aOY, aOZ) направлены в те же стороны, что и единичные векторы (I , j , k) системы отсчёта OXYZ.
> 0), то компоненты ускорения по координатным осям (аОХ,aOY, aOZ) направлены в те же стороны, что и единичные векторы (I , j , k) системы отсчёта OXYZ.
2. Если проекции ускорения на координатные оси отрицательны ( < 0, < 0, < 0), то компоненты ускорения по координатным осям (аОХ,aOY, aOZ) направлены в стороны, противоположные ортам (I,j,k ) системы отсчёта OXYZ.
Рассмотрим более подробно движение точки на координатной оси ОХ (рис. 2.10) по заданному уравнению движения X = f(t).
Если проекция  скорости V и проекция
скорости V и проекция  ускоренияа точки совпадают по знаку, то точка движется ускоренно. При
ускоренияа точки совпадают по знаку, то точка движется ускоренно. При  > 0 и
> 0 и  >0 точка движется в сторону увеличения координаты Х ускоренно. Если
>0 точка движется в сторону увеличения координаты Х ускоренно. Если  < 0 и < 0, то точка движется в сторону уменьшения координаты Х ускоренно. Если > 0 и < 0, то точка движется в сторону увеличения координаты замедленно. Если < 0 и > 0, то точка движется в сторону уменьшения координаты Х замедленно.
< 0 и < 0, то точка движется в сторону уменьшения координаты Х ускоренно. Если > 0 и < 0, то точка движется в сторону увеличения координаты замедленно. Если < 0 и > 0, то точка движется в сторону уменьшения координаты Х замедленно.
Если проекция ускорения на ось ОХ постоянна ( = const), то такое движение называют равнопеременным. При условии, что = const ≠ 0, уравнение равнопеременного движения точки записывают в виде
X = X0 +  0·t + ( ·t2)/2,
0·t + ( ·t2)/2,
где X0 – значение координаты точки в начальный момент времени; 0 - проекция начальной скорости V0 на координатную ось ОХ в начальный момент времени.
Если = const> 0, то такое движение называют равноускоренным.
Если = const< 0, то движение точки называют равнозамедленным.
Если = 0, то такое движение называют равномерным. Уравнение равномерного движения имеет вид X = X0 + ·t.
При условии, что =f(t) ≠ const, для получения уравнения движения выражение =f(t) необходимо дважды проинтегрировать.
Пусть, например, = 2·t. Представим это выражение в виде d /dt = 2·t. Разделим переменные в этом дифференциальном уравнении d = 2·t·dt. Первый интеграл от этого выражения имеет вид = 2·(t2/2) + C1 = t2 + C1, где С1 – постоянная интегрирования, которую находят по начальным условиям движения. Пусть при t0 = 0 проекция начальной скорости V0 на ось ОХ не равна нулю: 0≠ 0. Тогда при t0 имеем 0 = (t0)2 + C1. Откуда С1 = 0. Внося значение постоянной С1 в выражение, полученное при первом интегрировании, имеем = t2 + 0. Так как = dX/dt, то после разделения переменных имеем следующее дифференциальное уравнение движения dX = t2·dt +  0·dt. Интегрируя это уравнение, получим X = t3/3 + 0·t+ C2, где С2 – постоянная интегрирования, определяемая по начальным условиям движения. Пусть при t0 = 0 координата Х0 ≠ 0. Тогда X0 = (t0)3/3 + 0·t0+ C2 или С2 = Х0. Окончательно имеем уравнение прямолинейного движения
0·dt. Интегрируя это уравнение, получим X = t3/3 + 0·t+ C2, где С2 – постоянная интегрирования, определяемая по начальным условиям движения. Пусть при t0 = 0 координата Х0 ≠ 0. Тогда X0 = (t0)3/3 + 0·t0+ C2 или С2 = Х0. Окончательно имеем уравнение прямолинейного движения
X = (t)3/3 + 0·t + Xo.
Таким образом, если заданы уравнения движения точки в координатной форме, то можно в любой момент времени определить следующие кинематические характеристики:
1) траекторию движения;
2) положение точки на траектории движения;
3) проекции скорости на координатные оси, а, следовательно, и модуль скорости;
4) ориентацию вектора скорости в системе отсчёта по её направляющим косинусам;
5) проекции ускорения на координатные оси и модуль ускорения;
6) положение вектора ускорения в системе отсчёта по его направляющим косинусам.
Естественный способ задания
Движения точки
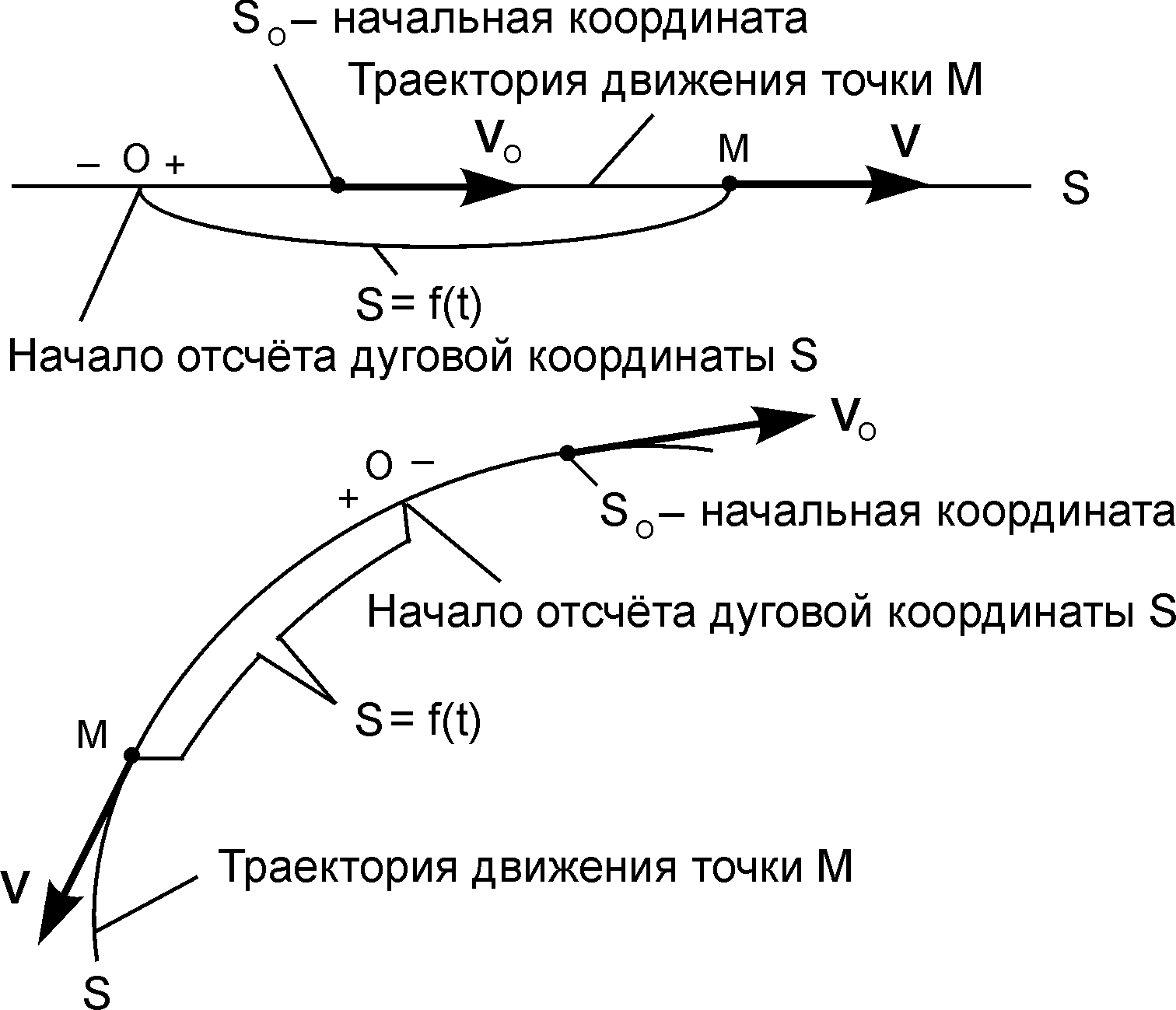 Рис. 2.11
Рис. 2.11
|
Естественный способ задания движения точки применяется в случае, когда траектория движения точки заранее известна. Траекторией могут быть как прямая, так и кривая линии (рис. 2.11).
На известной траектории движения точки выбирается неподвижная точка О, которую называют началом отсчёта дуговой координаты. Положение движущейся точки М на траектории определяется дуговой координатой, т. е. расстоянием ОМ = S, отложенным по траектории от начала отсчета О.
Прямую линию на рис. 2.11 можно считать дугой окружности, радиус которой равен бесконечности.
Расстояния, отложенные в одну сторону от точки О, условно считают положительным, а в противоположную сторону – отрицательным, т. е. устанавливается направление отсчета дуговой координаты. При движении точки М расстояние S от этой точки до неподвижной точки О изменяется с течением времени, т. е. дуговая координата S является функцией времени.
S = f(t).
Эту зависимость называют уравнением движения точки в естественных координатах.
Если вид функции S = f(t) известен, то для каждого значения времени ti можно найти значение дуговой координаты Si, отложить соответствующее расстояние по траектории от начала отсчета О и указать, где находится движущаяся точка М в этот момент времени.
Таким образом, движение точки определено, если известны следующие элементы: вид траектории движения точки (прямая линия, окружность, эллипс и т. д.); начало отсчёта (точка О) дуговой координаты; положительное и отрицательное (+, –) направления отсчёта дуговой координаты; уравнение движения S = f ( t ).
Дуговую координату точки не следует смешивать с длиной пути, пройденного точкой за время t.
Пример. Пусть уравнение движения точки имеет вид S = 10·sin(·t) см. При начальном времени t0 = 0 начальная координата S0 = 0. При t1 = 0,5 cS(t1) = 10 см; при t2 = 1 cS(t2) = 0; при t3 = 1,5 cS(t3) = – 10 см; при t4 = 2 cS(t4) = 0.
Таким образом, за время t4 = 2 c точка М прошла путь, равный 40 см, а её дуговая координата S4 в этот момент времени равна нулю.
Дата добавления: 2020-04-25; просмотров: 723; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!