ИССЛЕДОВАНИЕ свойств ОПТИМАЛЬНОЙ ПО БЫСТРОДЕЙСТВИЮ СИСТЕМЫ
Цель работы
Знакомство с принципом построения оптимальных и субоптимальных систем, анализом влияния основных параметров на ее переходные процессы и фазовый портрет.
Основные сведения
В работе исследуется объект управления, математическая модель которого имеет вид
 (2.1)
(2.1)
Требуется обеспечить в замкнутой системе оптимальные по быстродействию процессы перехода из произвольного начального состояния {x1(0), x2(0)} в заданное конечное, которое совпадает с началом координат, т.е. {x1(T) = 0, x2(T) = 0}.
С этой целью формируется оптимальный закон управления
 (2.2)
(2.2)
где S(x) – линия переключения управляющего воздействия, которая описывается уравнением
 (2.3)
(2.3)



 Структурная схема оптимальной по быстродействию системы приведена на рис. 2.1.
Структурная схема оптимальной по быстродействию системы приведена на рис. 2.1.
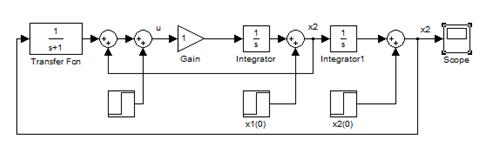
Рис. 2.1. Структурная схема оптимальной по быстродействию системы
В реальных системах точно реализовать полученную линию переключения не удается, поэтому используют ее различные аппроксимации, простейшей из которых является аппроксимация прямыми линиями (рис. 2.2).
Рис. 2.2. Аппроксимация линии переключения
Реальный алгоритм управления по форме совпадает с (2.2), но вместо S(x) используется ее аппроксимация Sp(x). В этом случае получают не оптимальные, а близкие к ним процессы, которые называются субоптимальными.
|
|
|
Методические указания
3.1. В качестве метода интегрирования рекомендуется выбирать метод Рунге – Кутта 4-го порядка.
Порядок выполнения работы
4.1. На основе структурной схемы (рис. 2.1) собрать схему моделирования оптимальной системы, параметры которой приведены в табл. 2.1.
4.2. Зарисовать фазовую траекторию из заданной начальной точки и переходные процессы  ; оценить время переходного процесса.
; оценить время переходного процесса.
4.3. Равномерно заполнить пространство фазовыми траекториями, произвольно выбирая начальные состояния. Зарисовать фазовый портрет оптимальной системы.
4.4. Исследовать влияние b на оптимальные процессы  , задавая
, задавая  и
и  .
.
4.5. Исследовать влияние уровня ограничения управляющего воздействия на оптимальные процессы, задавая  .
.
Т а б л и ц а 3.1
| Параметр | Вариант | |||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| b | 1 | 1.5 | 2.5 | 1 | 1.5 | 2 | 1.2 | 2 |
| C | 1.5 | 1 | 1.2 | 1.8 | 1 | 1.5 | 2 | 1.6 |
| D | 10 | 10 | 9.5 | 9.5 | 10 | 9.5 | 9.3 | 9.8 |
| x1(0) | 10 | 8 | 10 | 18 | 20 | 30 | 25 | 15 |
| x2(0) | 8 | 7 | 6 | 7 | 4 | 2 | 5 | 4 |
4.6. Исследовать свойства субоптимальной системы, аппроксимируя линию переключений в соответствии с рис. 3.2. Выбрать такие начальные условия, чтобы фазовая траектория проходила «левее», а затем «правее» точки пересечения идеальной и реальной линии переключения. Зарисовать фазовый портрет и переходные процессы  , выделив участок скользящего режима, оценить длительность переходного процесса.
, выделив участок скользящего режима, оценить длительность переходного процесса.
|
|
|
4.7. Выбрать начальные условия  и
и  так, чтобы фазовая траектория проходила через точку пересечения идеальной и реальной линии переключения. Зарисовать фазовую траекторию и процессы
так, чтобы фазовая траектория проходила через точку пересечения идеальной и реальной линии переключения. Зарисовать фазовую траекторию и процессы  ; оценить время переходного процесса.
; оценить время переходного процесса.
4.8. Исследовать влияние D на субоптимальные процессы, задавая  и повторяя п. 4.6.
и повторяя п. 4.6.
Содержание отчета
5.1. Цель работы.
5.2. Модель исследуемой системы.
5.3. Графики переходных процессов и фазовых портретов оптимальной системы.
5.4. Графики переходных процессов и фазовых портретов субоптимальной системы.
5.5. Выводы по работе.
Контрольные вопросы
6.1. Какие системы называются оптимальными?
6.2. В чем различие между задачей синтеза оптимальной системы и системы с заданными показателями качества?
6.3. Что представляет собой критерий оптимальности, как он задается?
|
|
|
6.4. Как ставится задача синтеза оптимальной по быстродействию системы?
6.5. Какой вид имеет закон управления в оптимальных по быстродействию системах?
6.6. Какие системы называются субоптимальными?
6.7. Как влияет на вид фазовых траекторий ограничение на управляющее воздействие?
6.8. Как влияет аппроксимация линии переключения на фазовый портрет системы?
6.9. Чем отличается субоптимальные переходные процессы от оптимальных?
СПИСОК ЛИТЕРАТУРЫ
1. Ротач В.Я. Кузищин В.Ф. Петров С.В. Настройка регуляторов по переходным характеристикам систем управления без их аппроксимации аналитическими выражениями // Автоматизация в промышленности. – №11. – 2009. – С.9-12.
2. Шубладзе А.М., Кузнецов С.И. Автоматически настраивающиеся промышленные ПИ и ПИД регуляторы // Автоматизация в промышленности. – 2007. – № 2. – С. 15–17.
3. Astrom K.J., Hagglund T. Advanced PID Control. – Research Triangle Park: ISA - The Instrumentation, Systems, and Automation Society, 2006. – 461 p.
4. Kuhn U. A practice oriented setting rule for pid-controllers: The t-sum-rule // Automatisierungstechnische Praxis. – 1995. – Vol. 37. – №5. – P.10-16.
5. Schaedel H.M. A new method of direct PID controller design based on the principle of cascaded damping ratios. European Control Conference (ECC). – IEEE, 1997. – P. 1265-1271.
6. K.L. Chien, I.A. Hrones and J.B. Reswick On the automatic control of generalized passive systems // Trans on ASME. – 1952. – Vol. 74. –P.633 -640.
|
|
|
7. Y. Li, K. Ang, and C. Chong, “Patents, software, and hardware for PID control—an overview and analysis of the current art,” IEEE Control Systrems Magazine, pp. 42–54, february 2006.
8. ALEXANDROV A.G., PALENOV M.V Self-tuning PID-I controller // Proc. 18th IFAC World Congress, Milano, Italy, 2011. – P. 3635–3640.
Дата добавления: 2020-04-08; просмотров: 177; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!