АНАЛИЗ МЕТОДОВ АДАПТИВНОЙ НАСТРОЙКИ ПИД-РЕГУЛЯТОРОВ
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ
РОССИЙСКОЙ ФЕДЕРАЦИИ
Старооскольский технологический институт
им. А.А. УГАРОВА
(филиал) федерального государственного автономного образовательного учреждения высшего образования
«Национальный исследовательский технологический университет «МИСиС»
Кафедра АИСУ
Глущенко А.И., Цуканов М.А. Халапян С.Ю.
Адаптивное и оптимальное управление
Методические указания к
выполнению лабораторных работ
для студентов направления
15.03.04 – «Автоматизация технологических процессов и производств»
(для всех форм обучения)
Одобрено редакционно-издательским советом института
Старый Оскол
2018
УДК 519.7
ББК 22.161
Рецензент: Начальник управления разработки и внедрения дирекции по информационным технологиям ОАО «Лебединский ГОК»
С.Н. Сгонников.
Глущенко А.И., Цуканов М.А. Халапян С.Ю. АДАПТИВНОЕ И ОПТИМАЛЬНОЕ УПРАВЛЕНИЕ. Методические указания к выполнению лабораторных работ. Старый Оскол: СТИ НИТУ «МИСиС», 2018. – 65 с.
Методические указания к выполнению лабораторных работ для студентов направления 15.03.04 – «Автоматизация технологических процессов и производств» (для всех форм обучения)
Ó Глущенко А.И., Цуканов М.А. Халапян С.Ю.
Ó СТИ НИТУ «МИСиС »
Содержание
ВВЕДЕНИЕ.. 4
|
|
|
Лабораторная работа № 1. 6
АНАЛИЗ МЕТОДОВ АДАПТИВНОЙ НАСТРОЙКИ ПИД-РЕГУЛЯТОРОВ 6
Лабораторная работа № 2. 19
Одноканальная система с градиентным алгоритмом адаптации 19
Лабораторная работа № 3. 31
система с пропорционально-интегральным алгоритмом изменения коэффициентов регулятора, синтезированным методом скоростного градиента.. 31
Лабораторная работа № 4. 42
Система с алгоритмом адаптации на основе второго метода Ляпунова 42
Лабораторная работа № 5. 53
Исследование адаптивной системы пониженного порядка 53
Лабораторная работа № 6. 60
ИССЛЕДОВАНИЕ свойств ОПТИМАЛЬНОЙ ПО БЫСТРОДЕЙСТВИЮ СИСТЕМЫ 60
ВВЕДЕНИЕ
В настоящее время в промышленности в целом и в горно-металлургической отрасли в частности (особенно в России) несмотря на большое количество разработок в области адаптивного и оптимального регулирования управление технологическими процессами в подавляющем большинстве случаев осуществляется с помощью ПИД регуляторов. Однако системы управления, построенные на таких принципах, являются детерминированными и не учитывают нелинейность реальных объектов управления в указанной области. Это приводит к снижению качества регулирования, увеличению времени и затрат на производство продукции.
|
|
|
Особенно остро такая проблема стоит в металлургии (нагревательные печи, дуговые сталеплавильные печи и пр.), где даже незначительное ухудшения качества переходного процесса, вызванное нелинейностью объекта управления, приводит к существенному увеличению расхода электроэнергии и, как следствие, значительным экономическим потерям.
На этапе первичной автоматизации производств учет такого рода нелинейностей не являлся критичным, поскольку сам факт внедрения ПИД регуляторов и микроконтроллерной техники позволял добиться значительного экономического эффекта. Однако на сегодняшний день достигнута зона насыщения логистической кривой развития АСУ, и обычная замена компьютеров на более мощные уже не приносит желаемого эффекта. Тем самым возникает необходимость учета нелинейностей объектов управления.
Для решения подобного рода задач в последнее время достаточно часто применяются адаптивные системы управления, производящие подстройку параметров ПИД-регуляторов в процессе работы. Такие системы могут быть построены как на основе классических, так и интеллектуальных методов.
В результате освоения дисциплины «Адаптивное и оптимальное управление», у обучающихся должны быть сформированы общекультурные, общепрофессиональные и профессиональные компетенции.
|
|
|
15.03.04 – Автоматизация технологических процессов и производств:
ОК-5 – способность к самоорганизации и самообразованию.
ОПК-1 – способность использовать основные закономерности, действующие в процессе изготовления продукции требуемого качества, заданного количества при наименьших затратах общественного труда.
ОПК-3 – способность использовать современные информационные технологии, технику, прикладные программные средства при решении задач профессиональной деятельности.
ПК-1 – способность собирать и анализировать исходные информационные данные для проектирования технологических процессов изготовления продукции, средств и систем автоматизации, контроля, технологического оснащения, диагностики, испытаний, управления процессами, жизненным циклом продукции и ее качеством.
ПК-8 – способность выполнять работы по автоматизации технологических процессов и производств, их обеспечению средствами автоматизации и управления, готовностью использовать современные методы и средства автоматизации, контроля, диагностики, испытаний и управления процессами, жизненным циклом продукции и ее качеством.
|
|
|
ПК-29 – способность разрабатывать практические мероприятия по совершенствованию систем и средств автоматизации и управления изготовлением продукции, ее жизненным циклом и качеством, а также по улучшению качества выпускаемой продукции, технического обеспечения ее изготовления, практическому внедрению мероприятий на производстве; осуществлять производственный контроль их выполнения.
Лабораторная работа № 1
АНАЛИЗ МЕТОДОВ АДАПТИВНОЙ НАСТРОЙКИ ПИД-РЕГУЛЯТОРОВ
Цель работы
Ознакомиться с методикой настройки ПИД-регулятора методами: Шубладзе, Циглера-Никольса, Куна – «правило Т-суммы» и Шеделя. Провести исследование настройки ПИД-регулятора и сравнительный анализ данных методов настройки на основе использования пакета Simulink среды MATLAB.
Основные сведения
Структура системы управления
ПИД-регуляторы, формирующие регулирующее воздействие в зависимости от изменения регулируемой величины, интеграла и производной от нее, являются по существу единственными регуляторами, используемыми на практике в системах автоматического управления технологическими процессами. Передаточная функция этих регуляторов обычно представляется следующим образом:
 , (1.1)
, (1.1)
где  ,
,  ,
,  – коэффициент передачи, постоянные времени интегрирования и дифференцирования, соответственно.
– коэффициент передачи, постоянные времени интегрирования и дифференцирования, соответственно.
Структурная схема системы с исследуемым ПИД-регулятором, основанным на пропорционально-интегрально-дифференциальном законе управления объектом представлена на рис. 1.1.
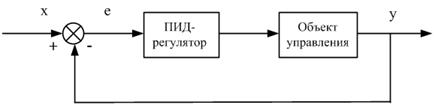
Рис. 1.1.
Вопреки распространенному представлению, ПИД-регуляторы являются далеко не простыми в настройке. Не говоря о том, что приходится осуществлять поиск по трем параметрам, задача оказывается многоэкстремальной. Так, если для ПИ-регулятора можно априори утверждать, что уменьшение коэффициента передачи и увеличение постоянной времени интегрирования при обычно существующей динамике объектов всегда ведут к увеличению запаса устойчивости, то для систем с ПИД-регуляторами такое утверждение может оказаться неверным.
В настоящее время еще отсутствует единый метод расчета параметров регулятора для контура регулирования. Однако предложен ряд подходов, многие из которых требуют наличия математической модели реального объекта.
Дата добавления: 2020-04-08; просмотров: 171; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!