Общие сведения о регулировании скоростей крановых механизмов
К рабочим механизмам крана предъявляются требования обеспечения определенного диапазона регулирования скорости. Например, механизм подъема груза кроме номинальной скорости подъема и спуска должен иметь малую скорость подъема и спуска (3...5 м/мин) для точной установки груза; механизмы передвижения, поворота и изменения вылета наряду с номинальной скоростью — пониженную скорость для перемещения грузов на небольшие расстояния. Пуск и остановка механизмов должны быть достаточно плавными, чтобы не вызывать динамических ударов и раскачивания груза.
Рабочие механизмы приводятся в действие электродвигателями переменного и постоянного тока. Механические характеристики двигателей (зависимость частоты вращения п от момента М нагрузки на валу) подразделяются на три категории (рис. а); абсолютно жесткую 1; жесткую II, при которой скорость двигателя незначительно изменяется при допустимых изменениях момента на его валу; мягкую III, при которой скорость двигателя значительно изменяется при изменении момента на его валу.
Различают естественные IV (рис. б - г) и искусственные V; VI механические характеристики электродвигателей. Естественной механической характеристикой называется зависимость оборотов двигателя от момента на валу при номинальных условиях работы двигателя в отношении его параметров (номинальные напряжение, частота, сопротивление и т. п.). Изменение одного или нескольких параметров вызывает соответствующее изменение механической характеристики двигателя. Такая механическая характеристика называется искусственной. На рисунке показаны естественные и искусственные механические характеристики асинхронного двигателя при изменении частоты тока (см. рис. б), напряжения питающей сети (см. рис. в), сопротивления цепи ротора (см. рис. г).
|
|
|
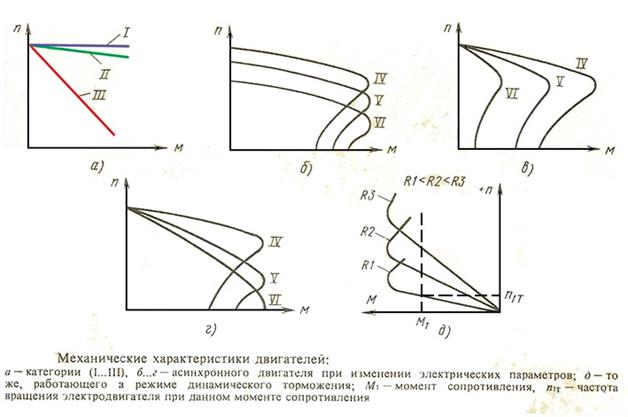
Момент вращения двигателя может быть направлен по отношению к направлению движения механизма по-разному. В соответствии с этим различают двигательный и тормозной режимы работы двигателя. В двигательном режиме работы направление движения механизма совпадает с направлением действия момента двигателя; в тормозных — момент двигателя направлен против направления движения механизма, двигатель в этом случае оказывает тормозящее действие. Асинхронный двигатель может работать в трех тормозных режимах: генераторном, противовключения и динамического торможения.
Для перехода из двигательного режима в режим динамического торможения статор асинхронного двигателя отключают от сети переменного и подключают к сети постоянного тока. Проходя по обмотке статора, постоянный ток образует неподвижное магнитное поле. При этом в обмотке вращающегося ротора будет наводиться э.д.с., которая вызовет ток в роторе. Взаимодействие неподвижного поля статора с током ротора создаст тормозной момент, величина которого зависит от тока статора (тока возбуждения), сопротивления ротора и частоты вращения электродвигателя. На рис. д показаны механические характеристики R1, R2, R3 асинхронного двигателя, работающего в режиме динамического торможения при постоянном токе возбуждения и различных сопротивлениях в цепи ротора.
|
|
|
Скорости крановых механизмов регулируются одним из следующих методов: использованием нерегулируемого двигателя, работающего на естественной механической характеристике совместно со специальной механической или электрической частью (редукционной или электромагнитной муфтой, планетарным редуктором); использованием искусственных механических характеристик двигателя, работающего в двигательном и тормозном режимах; комбинированным использованием первого и второго методов.
Электрооборудование крана КБМ-401П.
Электрооборудование, в зависимости от исполнения крана по приводу, состоит из электродвигателей постоянного и переменного тока, блоков пускорегулирующих резисторов, электромагнитных тормозов, пусковой и защитной низковольтной аппаратуры, пультов управления, конечных выключателей, изделий для освещения, обогрева, вентиляции, аппаратуры для сигнализации, контроля и защиты перечисленных в перечнях элементов схем электрических. Номинальное напряжение питания крана-380 В.
|
|
|
Напряжение на зажимах электродвигателей и в цепях управления ими при всех режимах работы электрооборудования крана должно быть не ниже 85% номинального.
Для подключения крана к источнику питания используется четырехжильный гибкий кабель длиной 50 м, который подключается к кольцам токоприемника кабельного барабана.
Электроаппаратура управления приводами крана питается напряжением 380 В или 220 для экспортного исполнения. Электрооборудование собственных нужд крана (освещение, обогрев кабины, сигнализация, приборы) питается напряжением 220 В. Для ремонтного освещения предусмотрен понижающий трансформатор 220/12 В, к которому подсоединены розетки.
Электроаппаратура, обеспечивающая пуск, разгон, работу в установившемся режиме, регулирование скорости, торможение, реверс и остановку механизмов крана, защиту от перегрузок и токов короткого замыкания расположена в аппаратной кабине или в шкафах* и в кабине машиниста. (* Для исполнений крана 00-1 … 13-1, 28-1 … 32-1)
|
|
|
Все органы управления механизмами крана для его работы, приборы безопасности, сигнальные лампы находятся в кабине машиниста в шкафу управления и на панелях пульта.
Для управления механизмами крана при его монтаже и испытаниях кран комплектуется выносным пультом управления.
Обогрев кабины машиниста и аппаратной кабины обеспечивается электрическими нагревателями.
В аппаратной кабине установлен вентилятор, в кабине машиниста-кондиционер. Для освещения зоны работы крана на его стреле установлены прожекторы.
Заземление крана осуществляется через нулевую жилу питающего кабеля.
Заземление корпусов электрооборудования производится на металлоконструкцию крана специальными заземляющими проводниками.
Защита электрических цепей от коротких замыканий осуществляется автоматическими выключателями. Электродвигатели с фазным ротором защищены от перегрузок максимальными токовыми реле, короткозамкнутый двигатель стрелы защищен тепловым реле.
Электрической схемой крана предусмотрена «нулевая» защита, исключающая возможность самопроизвольного включения приводов и аппаратов при внезапном появлении напряжения после его исчезновения. Это обеспечивается блок-контактами линейного контактора и специальной схемой цепей нулевой защиты.
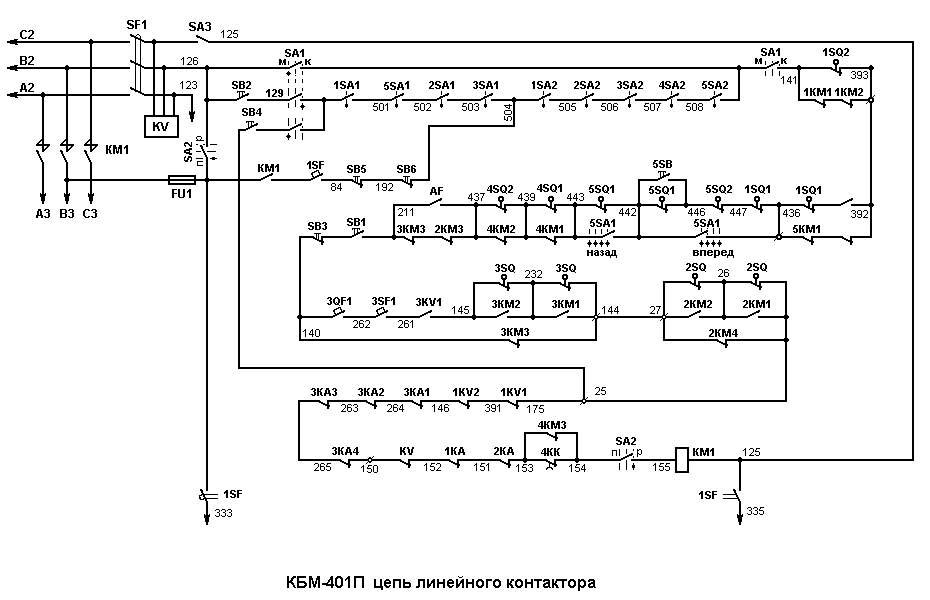
Цепь линейного контактора
1КА – реле максимального тока (грузовая лебедка).
2КА - реле максимального тока (механизм поворота).
3КА1 ¸ 3КА4 - реле максимального тока (механизм передвижения крана).
4КК – реле (стреловая лебедка).
KV, 1KV1, 1KV2, 3KV1 – реле напряжения.
1SF, 3SF1, 3QF1 – автоматические выключатели.
SA1 – переключатель «кабина – монтаж».
SA2 – переключатель «проверка – работа».
SA3 – аварийный выключатель (кабина).
SB1 – кнопка с ключом (кабина).
SB2 – кнопка включения линейного контактора (кабина).
SB3 – кнопка «стоп» (кабина).
SB4 – кнопка включения линейного контактора (монтажный пульт).
SB5, SB6 – кнопки аварийной остановки (флюгеры крана).
5SB – кнопка блокировки 5SQ1 в крайнем положении «назад».
1SQ1 – срабатывает при достижении подвеской верхнего положения (запрещает работу грузовой лебедки вверх и тележки вперед).
1SQ2 – останавливает привод грузовой лебедки в крайнем нижнем положении подвески (запрещает работу тележки назад).
1SQ3 – остановка привода подъема башни при выдвижении в верхнем положении.
2SQ – ограничитель поворота: (26 – 27) – вправо; (25 – 26) – влево.
3SQ – ограничитель передвижения крана: (144 – 232) – вперед; (145 – 232) – назад.
4SQ1 – ограничитель подъема стрелы на угол 30° (балочная стрела) или на максимальную высоту (подъемная стрела).
4SQ2 – ограничитель подъема стрелы при опускании в горизонтальное положение.
5SQ1 – ограничитель передвижения грузовой тележки: (442 – 443) – вперед; (442 –446) – назад.
5SQ2 – ограничитель передвижения грузовой тележки (446 – 447).
Дата добавления: 2020-01-07; просмотров: 278; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!