Подготовка к проведению работы.
3.1.1. Собрать схему, изображенную на рисунке 3.

Рисунок 3- Схема соединений для изучения шагового двигателя
3.1.2. Включите источник питания.
3.1.3. Убедитесь, что питание на контроллере присутствует (горят индикаторы +5V разъемов контроллера). Должна загореться подсветка дисплея.
3.1.4. Запустите среду Arduino. Откройте из примеров проект Lab ->StepMotor и загрузите его.
3.1.5. Проверьте работу программы и схемы. Произведите установку нуля по оптическому датчику положения вала, для этого нажмите кнопку 0 на клавиатуре. Положение ротора двигателя автоматически установится в нуль (риска на диске совпадёт с нулём шкалы).
Определение максимальной частоты вращения вала шагового двигателя
Максимальная частота вращения ротора ШД – это частота, при превышении которой начинаются пропуски шагов или срыв вращения ротора ШД. Максимальная частота зависит от параметров ШД, параметров контроллера ШД, величины нагрузки и прочих факторов.
3.2.1. Плавно повышайте частоту вращения ротора кнопкой A на клавиатуре, пока не произойдёт срыв вращения ротора двигателя. Запишите последнее значение частоты вращения, предшествующее срыву вращения.
FMAX = ____ об / сек
3.2.2. Спозиционируйте ротор, нажав кнопку 0.
Оценка зависимости величины акустического шума, создаваемого шаговым двигателем при вращении вала, от режима дробления шага.
3.3.1. Установите частоту вращения ротора 1 об / сек.
|
|
|
3.3.2. Изменяя шаг с 1/64 до 1/1 и обратно (кнопки 4 и 5) обратите внимание на изменение величины шума, издаваемого шаговым двигателем. Занесите наблюдения в таблицу 1, используя для оценки величины шума следующие определения по возрастанию: «отсутствует», «едва слышимый», «незначительный», «значительный».
Таблица 1
| Режим дробления шага | Микрошаговый режим | Шаговый режим | |||||
| 1/64 | 1/32 | 1/16 | 1/8 | 1/4 | 1/2 | 1/1 | |
| Величина шума | отсутствует | ||||||
3.3.3. Остановите ротор, нажав кнопку 0.
Исследование зависимости точности позиционирования ротора ШД от режима дробления шага
Сравните точность позиционирования ротора ШД для шагового и микрошагового(1/64) режимов.
3.4.1. Убедитесь, что установлен режим дробления шага 1/64. С помощью кнопок 7, 8, 9, С последовательно устанавливайте значения углов, указанных в первой строке таблицы 2, определяя углы ротора по шкале модуля и фиксируя их значения во второй строке таблицы.
3.4.2. Повторите п. 3.4.1 для режима целого шага (1 / 1), занося результаты измерений в третью строку таблицы 2.
Таблица 2
| Заданный угол, град | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Измеренный угол, град (режим 1/64) | |||||||||||
| Измеренный угол, град (режим 1/1) |
3.4.3.Оцените полученные результаты.
|
|
|
Пошаговое измерение токов, протекающих через обмотки ШД
3.5.1. Выключите источник питания.
3.5.2. Соберите схему, изображенную на рисунке 4.
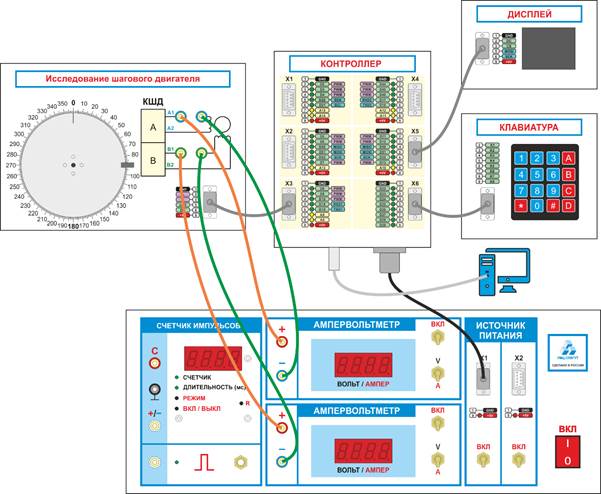
Рисунок 4- Схема соединений для изучения шагового двигателя
3.5.3. Включите питание.
3.5.4. Установите нуль кнопкой 0.
3.5.5. Установите режим дробления шага 1 / 1 (шаговый режим).
3.5.6. Поворачивайте ротор двигателя на один шаг кнопкой B, занося в таблицу 3 значения токов, протекающих через обмотки для каждого шага.
Таблица 3
| Номер шага | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Ток обмотки A, Ампер | ||||||||
| Ток обмотки B, Ампер |
3.5.7. Установите нуль кнопкой 0.
3.5.8. Установите режим дробления шага 1 / 2 (микрошаговый режим).
3.5.9. Поворачивайте ротор двигателя на один микрошаг кнопкой B, занося в таблицу 4 значения токов, протекающих через обмотки для каждого микрошага.
Таблица 4
| Номер микрошага | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| Ток обмотки A, Ампер | ||||||||
| Ток обмотки B, Ампер |
Содержание отчета
|
|
|
Отчет должен содержать:
1) результаты измерений и расчётов;
2) таблицы полученных результатов;
3) выводы
Лабораторная работа 10
Изучение контроллера шагового двигателя
1Цель работы
Изучение основных режимов работы таймеров микроконтроллера. Работа таймеров/счетчиков в режиме NORMAL. Управление работой шагового двигателя (ШД).
2Описание демонстрационной программы

|
|
|
|
4(O)
 3(Y)
3(Y)
 2(P)
2(P)
1(B)
Рисунок 9.3.1-1 Диаграмма управления шаговым двигателем
Длительность шага формируется таймером/счетчиком Т0 в режиме NORMAL. Значение задается инструментом Digital Writer (шестнадцатеричное число в пределах от 3 до 1F) через выходы DIO NI ELVIS, подключенные к контактам PC0…PC7 микроконтроллера. Управляющие сигналы выводятся через PA0...PA3, к которым подключается драйвер ШД (Рис. 9.3.1-6).
При включении питания загорается светодиод СТАТУС (PD4), и программа ожидает нажатия кнопки Старт (S1, подключенной к PD2). После нажатия кнопки Старт гаснет светодиод СТАТУС и загорается светодиод ОЖИДАНИЕ(PD6).
После нажатия кнопки Запись (S3, подключенной к PD1) программа считывает установленное значение длительности шага с PC0...PC7 и двигатель приводится во вращение с заданной скоростью. При этом загорается светодиод РАБОТА (PD5) и гаснет светодиод ОЖИДАНИЕ.
Для изменения скорости вращения двигателя нажимается кнопка Стоп (S2, подключена к PD3), задается новое значение в окне инструмента Digital Writer, нажимается кнопка Старт, затем Запись.
При нажатии кнопки Стоп вращение двигателя прекращается, гаснет светодиод РАБОТА и загорается светодиод ОЖИДАНИЕ.
Перезапуск программы осуществляется кнопкой Сброс.
Методика выполнения задания
Изучить алгоритм (Рис. 9.3.1-2) и код соответствующей демонстрационной программы, который, после нажатия кнопки С или Ассемблер, выводится в окне стандартного текстового редактора Windows.
Создать проект в среде Atmel Studio, перенести код программы в окно редактора, произвести компиляцию и исправить ошибки, если они возникнут. Подключить к плате программатор и прошить программу в память микроконтроллера. Произвести электрические подключения на плате в соответствии со схемой, приведенной на лицевой панели лабораторной работы (Рис. 9.3.1-6). Проверить работу программы.
Преподаватель задает студенту вариант из раздела Индивидуальные задания. На основании задания произвести изменения в имеющемся проекте. Измененную программу скомпилировать, отладить и прошить в память микроконтроллера, после чего изучить и проверить работу выходных устройств.
Составить и сохранить отчет по лабораторной работе, в который входят файлы проекта индивидуального задания, а также сохраненные цифровые диаграммы.
 |

|
Рис. 9.3.1-2 Алгоритм основной программы (а) и обработчика прерывания (б)
Дата добавления: 2020-01-07; просмотров: 176; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!