Подготовка к проведению измерений.
3.1.1 Собрать схему, изображенную на рисунке 4.
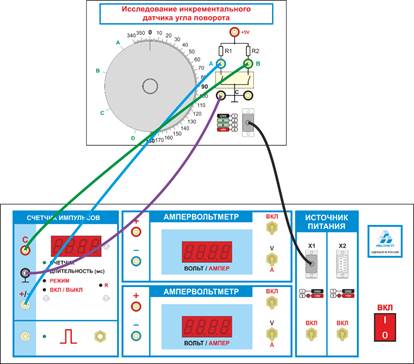
Рисунок 4- Схема соединений для изучения датчика с помощью счетчика импульсов
3.1.2. Включите питание измерительного блока, включите источник питания, включите питание счетчика импульсов.
3.1.3. Убедитесь, что при вращении вала датчика показания счетчика импульсов меняются.
Определение разрешения датчика с помощью счетчика импульсов
3.2.1. Установите ноль датчика. Для этого установите положение диска в ноль градусов. Сбросьте счетчик импульсов кнопкой R.
3.2.2. Поверните вал датчика на 360 градусов по часовой стрелке.
3.2.3. Запишите количество импульсов, которое насчитал счетчик.
N = ____
Полученное значение является разрешением датчика (количество импульсов на один оборота вала)
3.2.4. Рассчитайте дискретность измерения датчика в градусах:
σ = 360/N = _____ град
Снятие передаточной характеристики датчика с помощью счетчика импульсов
3.3.1. Снимите зависимость количества формируемых датчиком импульсов от угла поворота вала в пределах шкалы модуля. Занесите значения в таблицу 1.
Таблица 1
| Угол, Град | 340 | 0 | 30 | 60 | 90 | 120 | 150 | 180 |
| Количество импульсов | 0 |
Ручное измерение углов поворота с помощью датчика и счетчика импульсов
3.4.1. Определите угол поворота, соответствующий риске A. Для этого совместите риску диска с риской А и запишите показания счётчика
|
|
|
nA = ____.
Значение nAдолжно находиться в пределах 0..N и должно быть положительным.
3.4.2. Рассчитайте угол поворота
φA = (nA /N) * 360
3.4.3. Повторите измерения и расчёты для рисок B, CиD. Занесите результаты в таблицу 2.
Таблица 2
| Риска | A | B | C | D |
| Количество импульсов | ||||
| Угол, град |
Автоматическое измерение углов с помощью датчика и контроллера
3.5.1. Выключите источник питания и соберите схему, изображенную на рисунке 5.
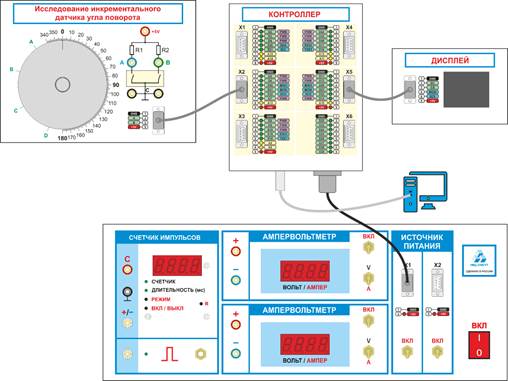
Рисунок 5
3.5.2. Включите источник питания.
3.5.3. Убедитесь, что питание на контроллере присутствует (горят индикаторы +5V разъемов контроллера). Должна загореться подсветка дисплея.
3.5.4. Установите положение вала в ноль.
3.5.5. Запустите среду Arduino. Откройте из примеров проект Lab ->IncEnc и загрузите его. Результатом выполнения программы должен быть вывод на дисплей:
- кода, соответствующего количеству импульсов;
- угла поворота вала датчика, вычисленного на основе кода.
3.5.6. Определите углы рисок A, B, CиD. Занесите результаты в таблицу 3.
Таблица 3
| Риска | A | B | C | D |
| Количество импульсов | ||||
| Угол, град |
Сравните со значениями, полученными вручную.
|
|
|
Содержание отчета
Отчет должен содержать:
1) результаты измерений и расчётов;
2) таблицы полученных результатов;
3) выводы.
Приложение 1
| Риска | A | B | C | D |
| Угол, град | 324 | 287 | 241 | 198 |
Лабораторная работа 8
«Исследование ультразвукового датчика расстояния»
Цель работы
Знакомство с основами измерения расстояний бесконтактным способом. Изучение принципа работы ультразвукового датчика расстояния. Получение навыков считывания данных с ультразвукового датчика расстояния.
Описание модуля

Рисунок 1 - Модуль «Ультразвуковой датчик расстояния»
Модуль «Ультразвуковой датчик расстояния» (рис. 1) предусматривает установку на монтажную панель. Имеет разъем типа DB9M для подключения к контроллеру и 4мм гнезда для подключения внешних измерительных приборов. На правой боковой стенке модуля расположен ультразвуковой датчик HC-SR04 (рис. 2).

Рисунок 2- Ультразвуковой датчик HC-SR04
Датчик имеет в составе ультразвуковой излучатель. Излучатель испускает импульсы частотой 40кГц длительностью 8 периодов. Отражённая от объекта волна улавливается ультразвуковым приемником. Для запуска одиночного измерения необходимо подать на вход Trigдатчика короткий импульс. Выходным сигналом датчика является импульс на выходе Echo длительность которого зависит от расстояния до объекта (рис. 3).
|
|
|
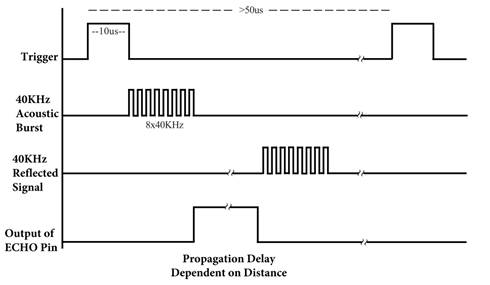
Рисунок 3
Порядок выполнения работы
Дата добавления: 2020-01-07; просмотров: 193; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!