Динамическое вписывание локомотива в кривую
Определение опрокидывающего момента, действующего на локомотив в кривой
Направление движения экипажа в кривой изменяется благодаря направляющей силе, действующей от рельсов и создающей центростремительное ускорение

где  - радиус кривой.
- радиус кривой.
Используя метод кинетостатики, покажем уравновешенную систему сил, включающих в себя кроме реальных сил, действующих на экипаж (сила тяжести, опорные реакции, направляющая сила), также и силу инерции – центробежную силу С. В расчёте на одну тележку эта сила равна
 ,
,
где  - количество тележек,
- количество тележек,
 - количество осей одной тележки.
- количество осей одной тележки.
Момент центробежной силы вызывает изменение опорной реакции: реакция от наружной рельсовой нити Rн увеличивается, а реакция от Rв от внутренней рельсовой нити уменьшается. В пределе при опрокидывании вагона вокруг наружнего рельса Rв будет равно нулю. Опрокидывающий момент
Восстанавливающий момент

Если для обеспечения устойчивости принять коэффициент запаса равным 2, чтобы восстанавливающий момент минимум в 2 раза превышал опрокидывающий, то
2 M оп =Мвосст
и
 ,
,
где  - возвышение наружного рельса, м;
- возвышение наружного рельса, м;
 - высота центра масс локомотива над уровнем осей колёсных пар, м;
- высота центра масс локомотива над уровнем осей колёсных пар, м;
 - Расстояние между кругами катания колёс, м
- Расстояние между кругами катания колёс, м
Высота расположения центров масс кузова
где  - высота центра масс кузова над уровнем осей колёсных пар, м;
- высота центра масс кузова над уровнем осей колёсных пар, м;
|
|
|
 - диаметр бандажа локомотива, м.
- диаметр бандажа локомотива, м.
Высота расположения центров масс тележки

где  - высота центра масс подрессоренных частей тележки над уровнем осей колёсных пар
- высота центра масс подрессоренных частей тележки над уровнем осей колёсных пар
Высота расположения центров масс неподрессоренных масс колёсных пар

Рассчитаем значение 

где m к - масса кузова, т;
mнп - масса неподрессоренных частей в расчете на одну колёсную пару, т;
mр – масса рамы тележки, т;
mд - масса тягового двигателя, т
Максимально допустимое по устойчивости от опрокидывания центростремительное ускорение
В кривой без возвышения

Максимально допустимая по устойчивости от опрокидывания центростремительная скорость
В кривой без возвышения
Для экипажа, движущегося в кривой с возвышением наружного рельса, система сил показана на рисунке 3.1.
Рисунок 3.1. Расчётная схема движения локомотива в кривой
Силы, действующие на тележку при движении в кривой
При входе в кривую на переднее колесо со стороны наружного рельса начинает действовать направляющее усилие У1, которое вынуждает экипаж двигаться по окружности вокруг центра кривой О (рисунок 3.2). Экипаж, двигавшийся с линейной скоростью v , начинает вращаться вокруг точки О с угловой скоростью
|
|
|
 .
.
Величины и направления абсолютных скоростей всех точек тележек будут различны. Для дальнейших расчётов удобно представить абсолютную скорость каждой точки как сумму переносной и относительной скоростей. Нам известна величина и направление скорости v в точке Ω. Тогда можно выразить абсолютную скорость точки А  как векторную сумму переносной скорости
как векторную сумму переносной скорости 
Абсолютная скорость v абс любой точки тележки, в частности центра переднего внутреннего колеса А, направлена перпендикулярно радиусу, проведённому из центра О в данную точку, и равна по величине.
 ,
,
где  - радиус вращения точки А.
- радиус вращения точки А.
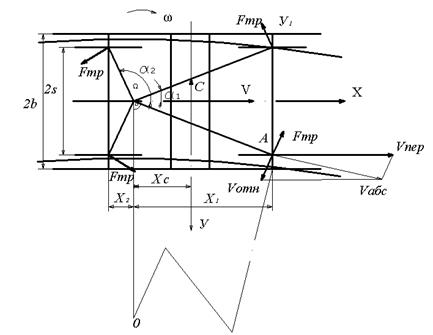
Рисунок 3.2. Схема сил, действующих на тележку в кривой
Все точки тележки, в том числе и центры колёс, имеют переносную скорость, равную v . Тележка движется по рельсам, и перемещение её вдоль продольной оси со скоростью v осуществляется за счёт качения колёс. Вторая составляющая абсолютной скорости – относительная скорость – по своему направлению не совпадает с плоскостью круга катания. А это означает, что движение колеса в этом направлении осуществляется за счёт проскальзывания.
Таким образом, абсолютную скорость каждого колеса можно представить как векторную скорости качения и скорости скольжения во вращательном движении вокруг полюса Ω. Качение колёс не сопровождается заметным сопротивлением, в то время как проскальзывание колёс по рельсам во вращательном движении тележки вокруг полюса Ω сопровождается действием сил трения Fтр. Качение колёс не сопровождается заметным сопротивлением, в то время как проскальзывание колёс по рельсам во вращательном движении вокруг полюса Ω сопровождается действием сил трения Fтр в опорных точках колес, препятствующих проскальзыванию.
|
|
|
Задача о силах, действующих на тележку при движении в кривой, рассматривается с рядом упрощений. Так, коэффициенты трения под всеми колёсами приняты одинаковыми и постоянными; учитывается только горизонтальная составляющая силы трения, определяемая вертикальной нагрузкой на колесо.
Направление и величины внешних сил, приложенных к тележке, определяют её положение относительно рельсов. При невысоких скоростях и соответственно небольших значениях силы С действие момента сил трения может заставить тележку двигаться по кривой в положении наибольшего перекоса, т.е. задняя колёсная пара касается гребнем колеса головки рельса внутренней нити. Полюс Ω максимально удалён от центра тележки; полюсное расстояние рассчитывается по формуле
|
|
|
 ,
,
где Δ – суммарный зазор для колёсной пары в кривой заданного радиуса;
для ρ ≥350 м, Δ=14 мм.
для ρ= 349-300 м, Δ=24 мм.
для ρ≤ 299, Δ=34 мм;
2а - база тележки (задание)
С ростом скорости тележка будет стремиться к хордовой установке, т.е. задняя колёсная пара, пройдя через промежуточные положения, при определённой скорости прижмётся к наружному рельсу. В этом случае полюс Ω окажется точно посередине экипажа, а полюсное расстояние хс=0.
При промежуточной установке тележки (0<xc<xcнп) её равновесие под действием рассмотренной системы сил в проекции на горизонтальную плоскость выражается двумя уравнениями, а именно: уравнением суммы проекции всех сил на поперечную ось ΣУ=0 и уравнением суммы проекций всех сил на поперечную ось ΣУ=0 и уравнением моментов относительно полюса.
ΣМΩ=0,
 ,
,
где  - направляющее усилие;
- направляющее усилие;
 - центробежная сила;
- центробежная сила;
 - коэффициент трения скольжения колёс относительно рельсов;
- коэффициент трения скольжения колёс относительно рельсов;
 - статическое нажатие от оси на рельсы.
- статическое нажатие от оси на рельсы.
Для кривой с возвышением h расчетное значение центробежной силы определяется выражением:
В кривой без возвышения приобретает значение Ср=С

где f Пстс os  - проекция силы трения на ось у
- проекция силы трения на ось у
х1 и х2 – расстояние от полюса поворота до осей колёсных пар, м;
f Пст  - момент силы трения относительно полюса поворота, кНм; считается положительным при направлении по ходу часовой стрелки
- момент силы трения относительно полюса поворота, кНм; считается положительным при направлении по ходу часовой стрелки
s=0,8 м – половина расчётного расстояния между кругами катания колёс.
В крайних положениях при упоре гребней колёс задней колёсной пары в наружный или внутренний рельсы система сил дополняется направляющей силой У2 отсутствует.
Два уравнения ΣУ=0,  ΣМ=0 содержит три неизвестных направляющее усилие У1(У1в), центробежную силу Ср(Свр) и вне явном виде абсцисса полюса вращения хс.
ΣМ=0 содержит три неизвестных направляющее усилие У1(У1в), центробежную силу Ср(Свр) и вне явном виде абсцисса полюса вращения хс.
Для решения системы заранее задаются рядом значений одного из неизвестных, а значение двух других определяют из уравнений. Система решается относительно неизвестных У1 и С.
При определившейся величине Ср легко находится значение скорости движения в кривой заданного радиуса. Из выражения
определяется скорость движения в кривой с возвышением
 , км/ч
, км/ч
В кривой без возвышения, т.е. при h =0
 .
.
Произведем расчет в табличной форме (таблица 3.1.). По результатам расчёта вычерчивают графики зависимостей У1( v ) и хс( v ) (рисунки 3.3-3.4).
Таблица 3.1
Решение системы уравнений
| Расчётная величина |
| ||||
| хс, м | 0 | 0,8 | 1,3 | 1,6 | 1,8 |
 , м , м
| |||||
 , м , м
| |||||
| |||||
 , м , м
| |||||
 , м , м
| |||||
| |||||

| |||||

| |||||
 ,м ,м
| |||||
А= 
| |||||
| |||||
| |||||

| |||||
 ,км/ч ,км/ч
| |||||
 ,км/ч ,км/ч
| |||||
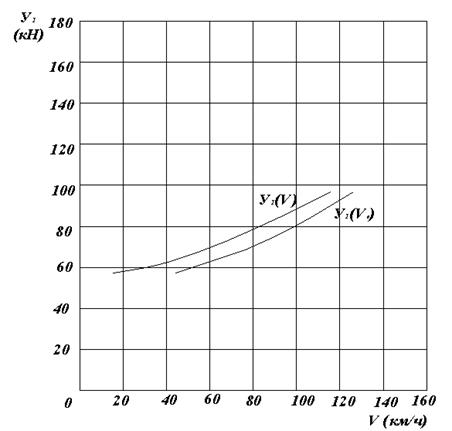
Рисунок 3.3. График зависимости направляющего усилия от скорости движения
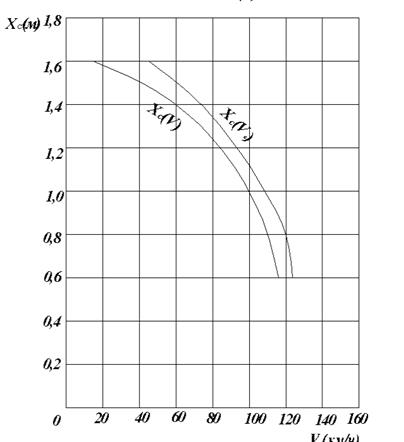
Рисунок 3.4. График зависимости полюсного расстояния от скорости движения
Дата добавления: 2019-11-25; просмотров: 897; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!