Высокоскоростной железнодорожный транспорт
личному взаимодействуют с контактным проводом. При взаимодействии с графитом и металлизированным углем на проводе образуется гладкая зеркальная поверхность. Применение меди и стали, наоборот, вызывает образование шероховатости на поверхности и как следствие — сильный износ как контактного провода, так и контактных вставок.
На японских, французских и германских ВСМ применяют различные материалы для контактных вставок в зависимости от конкретных условий эксплуатации.
10.11. Строительно-монтажные работы при электрификации ВСМ
К настоящему времени в странах, имеющих ВСМ, определились близкие технические приемы и технология работ по организации строительно-монтажных работ при электрификации ВСМ. Они принципиально не отличаются от электрификации обычных магистральных железных дорог, при этом исполнение каждой операции требует более высокого качества работы. На рис. 10.44 приведены основные работы, входящие в комплекс электрификации: 1 — монтаж опор; II — раскатка проводов; III — временное крепление проводов; IV — окончательное крепление проводов с соблюдением проектных отметок по высоте и в плане. Поскольку в настоящее время высокоскоростные магистрали сооружаются только электрифицированными, то мероприятия по обустройству систем электроснабжения, строительству линий электропередач, зданий для тяговых подстанций, установке опор и монтажу контактной сети входят в общий план сооружения всей инфраструктуры ВСМ.
|
|
|
При строительно-монтажных работах применяется высокопроизводительная техника, привлекается квалифицированный персонал специализированных организаций, которые ведут работы по электрификации ВСМ, как и другие, в основном на основе конкурсных тендерных торгов. При выполнении больших объемов электрификации работают строительно-монтажные поезда или аналогичные подразделения. Конструкции опор, других элементов контактной сети изготавливаются на специализированных предприятиях с постоянным входным контролем поступающего сырья и комплектующих изделий и контролем качества изготовленной продукции.
На строительно-монтажных площадках работает как общестроительная техника, дорожно-транспортные машины, так и специализированные (рис. 10.45), например, для установки опор контактной сети, включая рытье котлованов под опоры и их монтаж (рис. 10.46, рис. 10.47), и другие операции — раскатка привода (рис. 10.48) и т.п.
| Направление движения путевых машин |
| Рис. 10.44. Основные работы, входящие в комплекс электрификации: I — монтаж опор; II — раскатка проводов; III — временное крепление проводов; IV — окончательное крепление проводов с соблюдением проектных отметок по высоте и в плане. Основные машины, используемые при электрификации: 1 — мотовоз; 2 — платформа с бурильным станком и краном для установки опор; 3 — платформа со столбами для опор контактной сети; 4 — раскаточный комплекс; 5 — подъемная площадка для первичного крепления проводов; 6 — самодвижущаяся подъемная площадка для окончательного крепления проводов
|



| Рис. 10.45. Установка на железнодорожном ходу, применяемая для бурения скважин под фундаменты опор контактной сети и их бетони рования. Франция. 1995 г. |
Рис. 10.46. Фундамент для металлической опоры контактной сети ВСМ. Испания. 2010 г.
Одной из самых сложных операций при монтаже контактной сети, требующей внимания и осторожности в целях исключения повреждения контактного провода или несущего троса, является, так называемая «раскатка». В процессе ее осуществления провод или трос сматывают с барабанов, на которых они были доставлены с заводов, и равномерно распределяют по длине железнодорожного пути (рис. 10.49}. Для этой работы используют специальные рас- каточные монтажные платформы или поезда (рис. 10.49). В последних конструкциях имеются системы для автоматического задания величины натяжения проводов.
|
|
|
Раскатанные провода временно прикрепляют в подвешенном состоянии к консолям. А затем уже окончательно монтируют в положении, предусмотренном проектом контактной подвески. Современные конст-



| Рис. 10.48. Раскатка контактного провода со специальной платформы, приводимой в движение мотовозом. Франция. 1995 г. |
Рис. 10.47. Железобетонная опора контактной сети ВС.М. Франция. 1995 г.
| Рис. 10.49. Опытный раскаточный поезд с системой автоматического задания величины натяжения проводов контактной подвески. Италия — Россия. 2012 г. |
| Рис. 10.50. Монтаж контактного провода на ВСМ с передвижных вышек на смешанном автомобильно-железнодорожном ходу. 1990-е годы |




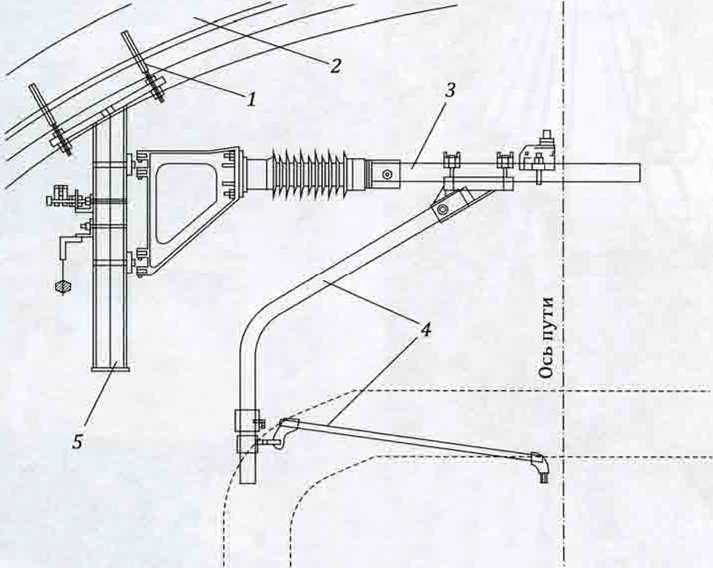
Рис. 10.51. Крепление контактной сети типа Re250 на ВСМ в двухпутном тоннеле: а — поперечное сечение; б — план линии: 1 — питающий фидер; 2 — несущий трос; 3 — контактный провод; 4 — габарит подвижного состава. Германия. 2001 г.
I
Рис. 10.52. Крепление контактной сети в Лечбергском базисном тоннеле: 1 — анкер; 2 — свод тоннеля; 3 — консоль; 4 — фиксатор; 5 — опорная стойка. 2010 г.
|
|
|
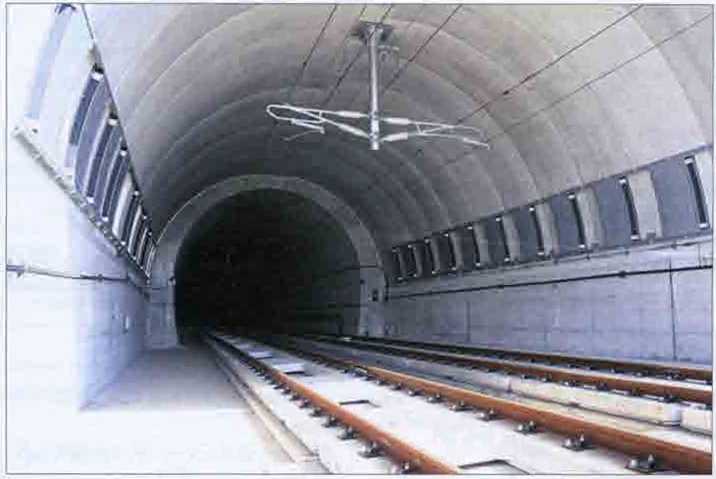
| Рис. 10.53. Контактная сеть в двухпутном тоннеяе на ВСМ «Кюсю». Япония. 2010 г. |
рукции подвесок требуют соблюдения высокой точности монтажа с привязкой к конкретному месту на плане пути, с допусками, измеряемыми в мм, на отклонение положения контактного провода в пространстве. Для проведения подобных работ требуется специализированная монтажная техника — подъемные монтажные платформы-авто- мотрисы, в том числе и на смешанном автомобильно-железнодорожном ходу [рис. 10.50}. В практике электрификации ВСМ находят применение средства высокоточного определения положения на местности и в пространстве (для выполнения проектных решений) с помощью спутниковых систем навигации GPS.
Определенная специфика имеется при устройстве контактной сети в тоннелях. Как правило, контактный провод подвешивается на консоли, кронштейны особой конструкции и формы [рис. 10.51—10.53}, при этом учитывается, что в тоннелях на большинстве ВСМ скорость движения в настоящее время по соображениям аэродинамики и безопасности ограничивается значением 200—250 км/ч. В некоторых случаях, например, в тоннелях на подходах к подземным вокзалам скорость ограничивается до более низких значений, а вместо контактного провода используются жесткие токопроводящие шины из алюминия.
Глава 11
Автоматика, телемеханика и связь на ВСМ
11.1. Системы автоматики, телемеханики и связи на ВСМ, общие требования
При организации высокоскоростного движения поездов предъявляются повышенные требования к системам автоматики, телемеханики и связи, определяющими из которых являются обеспечение функционирования при высоких скоростях, безопасности движения и надежности устройств и систем управления. Техническим регламентом Российской Федерации «О безопасности высокоскоростного железнодорожного транспорта» предписано, что подсистема железнодорожной автоматики и телемеханики (сигнализации,централизации и блокировки) должна обеспечивать безопасное движение подвижного состава с установленными скоростями и минимальным интервалом следования поездов. Указанные требования являются одними из основных при разработке систем управления и связи, определении способов обеспечения необходимых показателей быстродействия устройств и скорости передачи данных.
Система управления ВСМ рассматривается как единый комплекс, включающий устройства управления движением поездов, единую вычислительную среду, приборы обеспечения безопасности, связи и порядок технического обслуживания и ремонта устройств. Эта система призвана обеспечивать:
— безопасность перевозочного процесса;
— выполнение графика движения поездов;
— надежность функционирования технических средств;
— минимизацию эксплуатационных расходов.
Анализ эксплуатации ВСМ в ряде зарубежных стран и рекомендации международных организаций, причастных к созданию ВСМ, в первую очередь — Международного союза железных дорог, позволяют сформулировать ряд общих положений для систем управления движением поездов (СУДП). Одним из важных является вывод о том, что современную СУДП необходимо строить на базе принципов формирования так называемой «цифровой сети», получившей обозначение ISDN (от англ. — Integrated Services Digital Network). Такая система формируется для совместного решения задач управления ВСМ и предоставления услуг связи.
СУДП должна строиться на принципах обеспечения автоматического управления и максимальной автоматизации функций операторов (рис. 11.1). Она содержит: стационарную аппаратуру системы управления (САСУ), установленную на станциях СПЦ (станционный пункт управления) и в путевых пунктах концентрации (ППК), расположенных вдоль ВСМ, а также бортовую аппаратуру системы управления (БАСУ), размещаемую непосредственно на подвижном составе. Кроме того, в состав САСУ включена подсистема диспетчерского центра управления (ДЦУ).

Рис. 11.1. Структура системы управления движением поездов на ВСМ
Координация управления всеми составляющими подсистемами ВСМ осуществляется из ДЦУ. Так, ДЦУ существующей линии Санкт-Петербург — Москва, обеспечивает управление движением всех поездов на линии, включая скоростные, размещается в Санкт-Петербурге. Собственно СУДГ1 для этой линии основывается на традиционных, преимущественно релейного типа, системах сигнализации и автоматизированного управления — САУД.
В составе структуры — устройства обеспечения движения:
— автоматическая блокировка с автоматической локомотивной сигнализацией;
— электрическая централизация стрелок и сигналов;
— система диспетчерской централизации и технического обслуживания. При этом на станциях сохраняется сложившаяся инфраструктура: на постах электрической централизации (ЭЦ) перевозочный процесс организуют дежурные по станции, а в случаях использования микропроцессорной централизации (МПЦ) оборудуются автоматизированные рабочие места дежурных по станции. Здесь же находится персонал, обеспечивающий техническое обслуживание и ремонт. Вся магистраль оборудована системой автоблокировки с централизованным размещением аппаратуры (АБТЦ) на постах ЭЦ станций, примыкающих к перегону. В случаях превышения предельной длины перегонов (обусловлено ограничениями действия централизованной автоблокировки] устраиваются ППК. Регулирование скоростных и высокоскоростных поездов на линии Санкт-Петербург — Москва осуществляется системой многозначной локомотивной сигнализации.
Управление движением поездов обеспечивается бортовой системой БАСУ в автоматизированном режиме управления с участием машиниста. К основным функциональным требованиями СУДП относятся:
— автоматизированное управление станционными объектами (установка маршрутов, индивидуальный перевод стрелок, обеспечение информации для пассажиров);
— реализация заданного графика движения поездов с требуемой пропускной способностью и с соблюдением условий безопасности;
— определение местоположения поездов, локомотивов, рабочих дрезин с эксплуатационным и ремонтным персоналом;
— ведение технологических моделей перевозочного процесса;
— контроль состояния и измерение параметров бортовой и стационарной аппаратуры на ВСМ в реальном масштабе времени (мониторинг).
В целом СУДП представляет собой сложную иерархическую систему управления, основополагающие принципы которой закладываются при проектировании элементов системы. На всех ее уровнях применяются аппаратные средства на основе вычислительной техники. Еще одним принципом является предъявление установленных проектом требований по безопасности к подсистемам управления на каждом уровне. Общими задачами построения безопасных систем являются:
— контроль соблюдения условий безопасности на основе информационной модели перевозочного процесса и установленных технологических параметров объектов управления;
— обеспечение надежного управления в случае нарушений технологического процесса (во вспомогательных режимах с передачей ответственных команд);
— исключение ошибок пользователя устройствами СУДП;
— выработка управляющих воздействий с обеспечением безопасности;
— перевод объектов или системы в защитные состояния при отказах;
— обеспечение необходимых условий информационного обмена между иерархическими уровнями СУДП;
— обеспечение достоверности индикации данных о состоянии объектов контроля.
На последующих этапах предполагается реализация автоматических режимов управления:
— автоматическая установка маршрутов из ДЦУ на всех станциях линии;
— регулирование перевозочного процесса на основе автоматического построения графика движения;
— автоведение поездов техническим комплексом БАСУ.
Иерархия структуры СУДП позволит реализовать многоконтурность подсистемы обеспечения безопасности. На рис. 11.2 показано три контура:
— централизованный, на уровне ДЦУ, реализующий интервальное регулирование движения поездов и автоматическую установку маршрутов;
— децентрализованный контур — станционный уровень, представляющий собой модернизированные устройства СЦБ, обеспечивающие преемственность с действующими в настоящее время системами СЦБ;
— бортовой контур, исключающий угрозу безопасности на основе информации о движении поездов встречного и попутного направлений.
Кроме перечисленных автоматических контуров, сохраняется возможность включения в процесс управления движением поездов человека (диспетчера, дежурных по станциям, машинистов). Переход к ручному управлению представляет собой резервный контур.
Поэтапный ввод контуров управления позволяет повысить уровень обеспечения безопасности и обеспечить требуемые эксплуатационные показатели ВСМ, чем дос-
| Подсистема координатного регулирования | Безопасная ЭВМ ДЦУ |
| Подсистема управления маршрутами |
Централизованный контур
| Подсистема интервального регулирования | Безопасная ЭВМ ЭЦ и АБ |
| Подсистема управления объектами ЭЦ | |
| Подсистема мониторинга пути и объектов инфраструктуры |
Децентрализованный контур
|
| |||
| Бортовые исполнительные устройства | Безопасная ЭВМ |
| |
| Бортовые устройства автоведения | |||
| Бортовой контур | |||
Рис. 11.2. Контуры обеспечения безопасности движения поездов на ВСМ
тигается экономическая целесообразность уровня допустимого риска для пассажиров в течение рейса на каждом этапе эксплуатации.
Децентрализованный контур управления, выполняющий на первых этапах эксплуатации функции основного, сохранится как один из штатных контуров после полномасштабного ввода СУДП.
11.2. Особенности приборного и аппаратного обеспечения устройств СЦБ
Как показывает мировая практика, при больших скоростях движения установка проходных светофоров на перегонах теряет свою актуальность и доминирующей становится сигнализация на пульте машиниста. Вместе с тем для обеспечения маневровой работы и движения поездов, не оборудованных бортовой аппаратурой (хозяйственных, ремонтных), целесообразна установка на станциях напольных светофоров с применением упрощенной индикации (рис. 11.3, 11.4). В ряде стран, в том числе и в России, на ВСМ сохраняются принципы поездной и маневровой маршрутизации, применяемые на обычных железных дорогах.
На ВСМ повышаются требования надежности и безопасности функционирования к приборам и элементам СЦБ (рельсовые цепи, путевые датчики, средства индуктивной связи, радиотехнические устройства).
Важнейшим элементом современных систем железнодорожной автоматики и телемеханики являются рельсовые цепи. Традиционно они обеспечивают контроль свободности (занятости) рельсовых участков, целостность рельсовых нитей, взаимную увязку сигнальных показаний соседних светофоров. В системах автоматической локомотивной сигнализации (АЛС) рельсовые цепи используются в качестве линий индуктивной связи для обмена информацией между напольными и локомо-
| Рис. 11.3. Маневровый светофор со знаком границы блок участка. ВСМ. Бельгия. 2010 г. |
| Рис. 11.4. Маневровый светофор на ВСМ «Кюсю». Япония. 2011 г. |


| I I I I I I I I I г |
| 1111111II |
| Счет осей |
Сравнение
I
Рис. 11.5. Принцип определение занятости блок-участка с помощью счета осей на его входе и выходе
тивными устройствами. Однако рельсовые цепи обладают рядом недостатков: низкая надежность изолирующих стыков; неустойчивость работы в условиях изменения электрического сопротивления балласта в зависимости от погодных условий и других факторов; недостаточная точность определения координат поездов. Более надежными являются бесстыковые тональные рельсовые цепи, получившие распространение на участках, где используется цельносварной путь из рельсовых плетей «бесконечной длины».
Одним из преимуществ рельсовых цепей, по сравнению с другими датчиками занятости пути подвижными единицами, является контроль целостности рельсовой линии. Однако с помощью такого способа могут быть обнаружены только разрывы рельсов, в то время как микротрещины и повреждения головки рельсов не выявляются. Поэтому на ВСМ необходимо с установленной периодичностью проводить регулярное обследование всех участков пути с помощью измерительно-диагностических поездов (вагонов), оборудованных устройствами, которые дают объективную картину состояния рельсов, в том числе и обнаруживают некоторые скрытые от глаз дефекты. Эти устройства также фиксируют положение рельсовых нитей в плане и по уровню.
На ВСМ, помимо рельсовых цепей, целесообразно использовать и другие устройства контроля свободности пути, например, точечные датчики, которые иногда по старинке называют «рельсовыми педалями». Первые механические устройства с электрическими контактами имели конструкцию, напоминающую педаль, на которую подвижной состав при проходе нажимал колесом. Они выполняют лишь одну функцию: фиксируют проследование колесной парой подвижной единицей некоторой точки пути (рис. 11.4—11.6). По сравнению с рельсовыми цепями такие датчики обладают рядом достоинств: устойчивость их работы не зависит от внешних факторов (состояния электрического сопротивления балласта и рельсов); отсутствует ограничение максимальной длины контролируемых участков; на эти приборы сигнализации не влияет обратный тяговый ток. При использовании точечных датчиков производится счет осей подвижного состава, вошедших и покинувших определенный участок пути (рис. 11.5). На основании сравнения этих данный устройство выдает сигнал о свободности или занятости участка.
В настоящее время разработаны и эксплуатируются различные бесконтактные датчики индукционного типа (рис. 11.6). Их действие основано на изменении магнитного сопротивления фиксирующего устройства под влиянием движущейся мимо него колесной пары. В некоторых странах, например, в Японии, используются и пьезоэлектрические путевые датчики. На линии Петербург— Москва проведены испытания дополнения рельсовых цепей системой счета осей с целью повышения надежности работы СУДП в целом.
На ряде зарубежных железных дорог внедрены точечные радио-датчики нового поколения, так называемые балисы[LVI], которые в зависимости от осуществляемых ими функций разделяются на пассив-
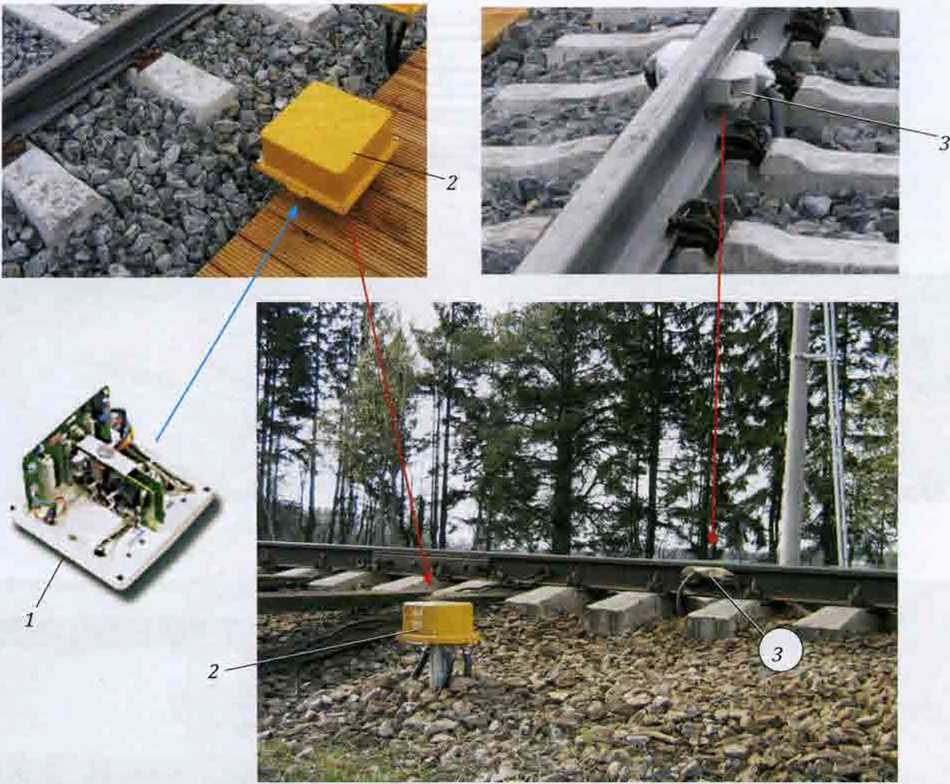
| Рис. 11.6. Компоненты устройства электронной путевой педали фирмы «Сименс» и пример ее установки на пути: 1 — приборный блок (внутренний вид); 2 — размещение приборного блока на пути; 3 — индукционный датчик («педаль») |
Конструктивно балисы размещаются на шпале или плите между рельсами. Эти устройства содержат электронные компоненты радиопередатчика и элементы памяти, в которых записаны сведения нормативного характера (географические координаты, особенности профиля участка и т.п.).
Еще одним техническим средством, позволяющим осуществлять контроль свободное™ участков пути, являются линии индуктивной связи с проводниками (шлейфами), укладываемыми на шпалах или подошвах рельсов вдоль пути следования поезда (рис. 11.8). Через определенные интервалы меняется взаиморасположение проводников шлейфов путем их перекрещивания (так называемого «транспонирования»), чем обеспечивается смена фазы сигнала, поступающего на локомотив при проследовании мест перекрещивания шлейфов. По количеству этих изменений определяется положение локомотива на участке, а при известной длине поезда вычисляется и часть занимаемого пути.
Примером практической реализации на магистральном железнодорожном транспорте линий с индуктивной связью является система LZB фирмы «Siemens». Местоположе-

| Электронные маркеры (балясы) |

| б |


| г |

| Рис. 11.7. Балисы: а — схема размещения маркеров на пути; б—д — внешний вид датчиков, используемых в разных странах, и способы их установки. 2000-е годы |
Другим примером использования линий индуктивной связи является комплекс устройств «Euroloop» (от англ, loop — петля), в котором, в отличие от системы LZB, для передачи данных линейные кабельные шлейфы (рис. 11.9) используют не на всем протяжении пути, а только на отдельных участках (дискретно). Передача информации осуществляется в одном направлении — с пути на локомотив, на который сообщаются сведения о допустимой скорости движения, местоположении участков с ограничением скорости, расстоянии до следующей зоны передачи данных (шлейфа), что обеспечивает контроль бортовыми устройствами исправности очередного шлейфа и в случае необходимости переход системы в защитное состояние.
Существенным конструктивным недостатком систем типа LZB и «Euroloop» является


| Рис. 11.8. Шлейф индуктивной связи, размещенный внутри рельсовой колеи: а — схема устройства; б — пример закрепления на ВСМ. Испания. 1991 г. |

| Рис. 11.9. Укрепляемый на рельсах коаксиальный кабель системы Euroloop S21 фирмы «Siemens». 2005 г. |
В последние годы достигнут прогресс в использовании следующего поколения координатных систем определения положения подвижных единиц без использования напольных кабельных шлейфов, с применением радиоканалов, в том числе радионавигационных комплексов.
Радионавигационные системы с помощью бортовой аппаратуры и сигналов передатчиков, расположенных на Земле или на искусственных спутниках Земли, позволяют подвижному объекту измерять параметры своего движения: координаты, скорость, ускорение. С развитием техники и средств связи все больший интерес представляют спутниковые радионавигационные системы, которые имеют ряд преимуществ по сравнению с наземными, в частности, обеспечивают устойчивую связь в условиях пересеченной местности.
В настоящее время спутниковые навигационные системы типа американской GPS или российской ГЛОНАСС (ГЛОбальная НА- вигационная Спутниковая Система) позволяют определять координаты движущихся объектов с точностью до 2—3 м, что вполне достаточно для реализации координатного регулирования движения поездов. Кроме того, спутниковые системы с разной степенью функциональности действуют и используются для нужд ВСМ: американская NAVSTAR GPS (NAVigation Satellites providing Time And Range — англ: навигационные спутники, обеспечивающие измерение времени и расстояния; Global Positioning System (GPS) — англ.: система глобального позиционирования), российская ГЛОНАСС и европейская Galileo («Галилео»). Системы могут обеспечивать обмен информацией между подвижными единицами и пунктами управления (станционный и диспетчерский уровни). Однако на точность определения координат системами GPS, ГЛОНАСС влияет уровень приема сигнала от спутников. Прием сигналов ухудшается под плотной листвой деревьев или из-за очень большой облачности, при наличии помех от наземных радиоисточников. Перспективным является применение спутниковых навигационных систем в сочетании с традиционными устройствами (АЛС, бортовыми измерителями параметров движения) и балисами, однако широкого коммерческого применения подобные системы пока не нашли.
При этом, что касается бортовых измерителей параметров движения, то в настоящее время широко используются осевые измерители пройденного пути и мгновенной скорости (одометры). Принцип их действия основан на определении угловых перемещений колесных пар. Датчики первичной информации этих устройств генерируют импульсные сигналы, по числу которых вычисляется пройденный путь поезда, а следовательно, и его координата; по частоте импульсов устанавливается скорость движения, а по скорости изменения частоты импульсов — ускорение движения поезда. Основными причинами погрешности измерений осевыми датчиками являются: несовпадение осей датчика и колесной пары; возмущение рессорной подвески локомотива при воздействии пути; проскальзывание колесных пар при боксовании; изменение радиусов колес в результате их износа и радиуса круга катания в кривых.
Лучшими по точности являются радиолокационные измерители, основанные на использовании эффекта Доплера. Так, в диапазоне скоростей от 3 до 7 км/ч их погрешность составляет не более 2 %, а при больших скоростях, вплоть до 350 км/ч, — 0,01 %. Погрешность измерения пройденного пути составляет 0,2 %.
Одним из самых ответственных элементов путевой структуры являются стрелочные переводы. На применяемых на ВСМ пологих переводах длина остряка достигает нескольких десятков метров, что создает определенные трудности при устройстве стрелочных электроприводов, которые должны обеспечить надежный перевод стрелки и запирание остряков в крайних положениях при любых погодных условиях. Усилия от стрелочного электропривода должны прилагаться к относительно длинным
и гибким острякам в нескольких точках. Контроль положения остряка также должен осуществляться по всей его длине. Для этого на пологих стрелках ВСМ устанавливаются не один, а несколько приводов по всей длине остряка (рис. 11.10).
Опыт применения пологих стрелочных переводов на высокоскоростных магистралях показал правильность перехода от использования одного стрелочного электропривода (СЭП), обладающего большим механическим переводным усилием и системой рычагов для управления дополнительными замыкателями, к устройствам у которых для каждого внешнего замыкателя предусмотрен индивидуальный электропривод с относительно небольшим усилием на рабочем шибере.
К переводным механизмам стрелок на высокоскоростных железных дорогах предъявляются определенные требования:
— механическое усилие для передвижения длинных остряков и сердечников крестовин должно прилагаться по всей их длине в нескольких точках и обеспечиваться группой электроприводов;
— безусловное замыкание прилегающего остряка в определенных точках с обеспечением возможности перемещения остряков относительно рамного рельса в заданных пределах;
— надежное фиксирование отведенного остряка по всей длине;
— контроль подвижной части стрелки в части недопущения предельного сужения колеи;
— контроль обеспечения требуемого зазора между контррельсом и ходовым рельсом;
— надежная сигнализация взреза стрелки.
Наличие внешних замыкателей уменьшило вибрацию длинных остряков, что положительно сказалось на стабилизации элементов стрелочного перевода по уровню.

| Рис. 11.10. Приводы остряков стрелочного перевода на ВСМ. Нидерланды. 2010 г. |
на с тем, что отдельные детали механизма электропривода, в частности, тяги, приводящие в движение остряки, устанавливаются между двумя соседними шпалами в шпальном ящике, балласт в который помещается только до уровня нижней поверхности шпалы. Это не дает возможности вести машинную подбивку двух соседних со стрелочным приводом шпал, что приводит к нарушению непрерывности технологического цикла процесса обслуживания пути, способствует уменьшению плотности балласта под этими двумя шпалами и к заметному вертикальному смещению пути под воздействием нагрузки от подвижного состава. Проведенные испытательные поездки показали, что в такой ситуации уже при скорости 230 км/ч мгновенные значения усилий в остряке достигают 4000 Н.
Решение этой проблемы возможно применением конструкции стрелочного привода защелочного типа, размещаемого в корпусе так называемой «полой шпалы» (рис. 11.11). Привод в полой шпале физически заменяет железобетонную шпалу; механически защищает клиновой замыкатель, рабочие и контрольные тяги остряков; улучшает функционирование стрелочного привода в зимних условиях, так как в полой шпале имеется электроподогрев. Такой стрелочный перевод не создает помех для работы путевой техники, производящей подбивку балласта (рис. 11.12). Как показали опыт эксплуатации и испытания, указанный тип привода особенно эффективен на стрелочных переводах с остряками большой длины, предназначенных для высокоскоростного движения. Отечественный опытный образец такого стрелочного привода (СПМ) проходит испытания на ст. Уне- ча Московской железной дороги.
На линии между Москвой и Санкт-Петербургом в настоящее время для организации движения со скоростями до 200 км/ч используются стрелочные переводы Р65 марки 1/11 проекта 2726 и проекта 2956 на участке со скоростями до 250 км/ч.
Для перевода стрелки проекта 2726 установлены электроприводы (рис. 11.13):
— СЭП 1 типа СП-12У с внешним замыкателем ВЗ-7(ВЗ) на остряках и с рычажным переводным механизмом без замыкателя;
— СЭП 2 типа СП-12У с внешним замыкателем ВЗК на крестовине и с рычажным переводным механизмом без замыкателя.
Переводные рычажные механизмы широко используются за рубежом, но, в отличие от наших, совместно с внешними замыкателями в каждом сечении, что значительно повышает безопасность движения поездов по стрелке. На российских железных дорогах принято устанавливать внешние замыкатели на стрелочных переводах при ско-

Рис. 11.11. Интегральный стрелочный привод фирмы Сименс S700 V в полой шпале: 1 — железобетонная шпала; 2 — полая шпала; 3 — рамный рельс; 4 — отжатый остряк; 5 — прижатый остряк; 6 — рамный рельс; 7 — электродвигатель с редуктором; 8 — переводной механизм; 9 — рабочие и контрольные тяги

| Рис. 11.12. Работа путевой машины на стрелочном переводе, оснащенном приводом, в полой шпале |

| Рис. 11.13. Схема установки стрелочного электропривода на стрелочном переводе типа 2726 |

| ВСП-220Н ВСП-1520Н |
| ВСП-220К ВСП-150К |
| Рис. 11.14. Схема установки стрелочного электропривода на стрелочном переводе типа 2956 |
ростях движения поездов 160 км/ч и более. При меньших скоростях применяются электроприводы с внутренним замыканием типа СП-6М.
Для перевода и контроля стрелки проекта 2956 устанавливают электроприводы на остряках либо на крестовине (рис. 11.14).
На остряках:
— СЭП 1 типа ВСП-220Н с внешними замыкателем ВЗ-7 в первом сечении;
— СЭП 2 типа ВСП-150Н с ВЗ-7 во втором сечении (в 4 метрах от первого).
На крестовине:
— СЭП 3 типа ВСП-220К с внешним замыкателем ВЗК в первом сечении,
— СЭП 4 типа ВСП-150К с внешним до- жимателем (ДС) во втором сечении и переводным рычажным механизмом в третьем сечении.
Причем два электропривода СЭГИ и СЭП2 работают одновременно и переводят подвижный сердечник крестовины, затем, два
других электропривода СЭПЗ и СЭП4 также работают одновременно и переводят остряки. Электропривод, установленный в первом сечении (по оси межостряковой тяги) должен переместить остряки на 150 мм, во втором сечении (в конце острожки) — на 70 мм. Также переводится и крестовина. Эти различия в ходе, характерные для длинных остряков и подвижной крестовины, предопределили применение приводов с различным ходом шибера. Однако, время перевода приводов должно быть одинаковое. Поэтому, для выравнивания угловых скоростей, в приводе с большим ходом шибера используется электродвигатель, передающий большее число оборотов вала и имеющий большую мощность, так как он «стартует» раньше и раньше принимает на себя силовую нагрузку со стороны остряков. В некоторых зарубежных электроприводах, например, компании Bombardier привод EBI Switch 2000, для выравнивания угловых скоростей применяют программируемые преобразователи частоты.
11.3. Средства регулирования движения поездов на перегонах
Технический комплекс интервального регулирования движения поездов (ИРДП) ВСМ решает задачи, характерные для магистрального транспорта с учетом специфики высокоскоростного движения. При организации высокоскоростного движения должно быть исключено внезапное изменение характера движения поезда по причине неисправности технических средств и необходимости применения экстренного торможения, что может привести к травмам пассажиров, повышенному износу пути и подвижного состава.
Требуется увеличение межпоездного интервала. На существующей скоростной магистрали Санкт-Петербург — Москва этот интервал равен десяти блок-участкам обычной автоблокировки. Из-за недостаточного количества комбинаций сигнальных показаний напольных светофоров регулирование скорости машинистом осуществляется по показаниям многозначной автоматической локомотивной сигнализации (индикация на локомотивном светофоре).
При организации скоростного и высокоскоростного движения изолирующие стыки в рельсовых цепях являются нежелательными элементами конструкции пути. В настоящее время на магистрали Санкт- Петербург— Москва используются бесстыковые рельсовые цепи тональной частоты.
Необходима организация двухсторонней связи между подвижными единицами и напольным оборудованием с дальнейшей трансляцией информации в центры управления движением поездов — ДЦУ. К этим средствам связи предъявляются высокие требования по быстродействию и достоверности передачи.
В общем случае система интервального регулирования движения поездов на ВСМ может быть выполнена тремя способами, принципиально различными относительно допустимого интервала между подвижными единицами:
— децентрализованное регулирование движения поездов с постоянными блок- участками, контролируемыми системой дискретного интервального регулирования;
— централизованное регулирование движением поездов с подвижными дискретными блок-участками;
— координатное регулирование.
Рассмотрим более подробно каждый из способов.
При первом способе — децентрализованном — регулирование движения поездов осуществляется по фиксированным блок-уча- сткам. При этом используются рельсовые цепи с их традиционными функциями датчика свободное™ (занятости) участка пути и целостности рельсового пути, а также канала передачи информации на локомотив. На поезд передаются сигналы, вырабатываемые аппаратурой децентрализованного контура управления.
Среди главных причин недостаточной пропускной способности такой автоблокировки (АБ) следует отметить такие, как малую информационную емкость; полное отсутствие гибкости в управлении движением поездов; низкую дискретность определения местоположения поездов на перегоне, обусловленную применением рельсовых цепей длиной до 2500 м.
Использование напольной аппаратуры АБ требует обеспечения ее непрерывным электропитанием, для чего необходимо устройство высоковольтных линий электроснабжения; периодическое обслуживание, регулировка и ремонт. Соблюдение этих требований усложняется тяжелыми климатическими условиями России и обусловливает необходимость содержания большого штата обслуживающего персонала и вспомогательного оборудования.
Большое количество используемой системами АБ напольной аппаратуры снижает общую надежность и безопасность управления. Сбои в работе систем увеличивают психофизиологическую нагрузку на локомотивные бригады и дежурных по станциям. Перекрытие сигнала на запрещающее показание перед движущимся поездом вызывает необходимость применения экстренного торможения, что приводит к увеличению механических нагрузок на подвижной состав и на верхнее строение пути, а также может вызвать выжимание вагонов.
Вторым вариантом первого способа интервального регулирования с фиксированными блок-участками является использование счетчиков осей для контроля занятости и свободности рельсовых участков и точечной автоматической локомотивной сигнализации (АЛСТ) с применением путевых приемопередатчиков — балис. АЛСТ реализуется с помощью радиотехнических средств ближнего действия и составляет основу децентрализованного контура интервального регулирования системы управления движением поездов. Стационарная аппаратура АЛСТ предназначена для передачи на поезд и приема с поезда информации по управлению и организации вычислительными средствами БАСУ функционирования автоблокировки с фиксированными блок-участками. В момент прохода поезда мимо датчиков осуществляется обмен информацией между подвижной единицей и стационарной аппаратурой АЛСТ. Через приемопередатчики на поезд поступают сигналы, вырабатываемые аппаратурой децентрализованного контура управления, характеризующие состояние (занятость— свободность) впередилежа- щих блок-участков, а также информация централизованного контура управления о разрешении движения и об ограничении скорости на каких-либо из блок-участков и т.п. С поезда принимается информация о скорости движения, диагностические данные и ряд других параметров.
Второй вариант первого способа требует реализации интервального регулирования работы бортового оборудования следующим образом: при прохождении путевого приемопередатчика, происходит двусторонний обмен информацией между поездом и стационарной аппаратурой. Бортовой приемопередатчик, обнаружив путевой приемопередатчик, принимает данные о поездной ситуации на магистрали в текущий момент времени, а затем передает собственную информацию.
Длина блок-участка устанавливается не менее максимальной длины тормозного пути и на перегонах составляет 5—10 км. На головном и хвостовом вагонах поезда располагаются два комплекта бортовой аппаратуры точечной АЛС (АЛСТ), фиксирующей занятие или освобождение блок- участков. При проходе поезда мимо стационарной аппаратуры АЛСТ с локомотива передается его номер и данные о местонахождении поезда, а на локомотив — сигналы о занятости впередилежащих блок-участков и ограничениях скорости. Характеристики каждого блок-участка хранятся в устройствах памяти на борту поезда.
Ограждение движущегося поезда сигналами АЛСТ аналогично модели ограждения движущегося поезда сигналами светофоров существующих систем автоблокировки. Точка начала снижения скорости рассчитывается бортовой центральной вычислительной машиной на основании скорости поезда, длины соответствующего блок-участка и состояния тормозной системы.
Минимально допустимое расстояние между поездами должно составлять не менее одного блок-участка и зависит от скорости движения поезда. В случае фиксации головным приемопередатчиком поезда занятости блок-участка и подачи хвостовым приемопередатчиком сигнала об освобождении блок-участка при движении поезда с максимальной скоростью минимально возможное расстояние до идущего впереди поезда может составлять длину трех блок- участков, а при снижении скорости сокращается до одного. В случае же работы только одного приемопередатчика (второй в резерве) с фиксацией занятости блок- участка и освобождения предшествующего минимальное расстояние между поездами должно быть равно четырем блок- участкам за вычетом длины поезда.
При необходимости ограничения скорости движения поезда на каком-либо блок- участке или его отрезке из ДЦУ на точечный датчик, установленный перед предыдущим блок-участком, подаются кодовые комбинации, с помощью которых передается сигнал о величине ограничения скорости, а также указываются координаты точек начала и конца действия ограничения внутри блок-участка. К началу участка ограничения скорости поезд снижает ее до заданной величины и этот участок проходит с допустимой скоростью.
При втором способе — централизованном регулировании движения поездов осуществляется переменное включение в блок- участок такого количества рельсовых цепей, которое обеспечивает безопасный интервал попутно следующих поездов. При этом интервальное регулирование осуществляется посредством многозначной локомотивной сигнализации без проходных светофоров. Этот способ обеспечивает повышение пропускной способности существующей железнодорожной линии и может быть с минимальными затратами реализован на существующей линии со скоростным движением Санкт-Петербург — Москва. Повышение пропускной способности перегонов многозначные АБ обеспечивают также и за счет увеличения скорости движения поездов в условиях предоставления сигнальной информации о состоянии большего числа впереди лежащих блок-участков (расстояний до препятствия в виде совокупности находящихся впереди свободных рельсовых цепей). Таким образом, использование второго способа регулирования на линиях с интенсивным движением поездов предоставляет новые возможности для выбора оптимальной скорости движения подвижных единиц:
- на поезд непрерывно поступает информация о фактическом интервале до впереди идущего поезда или точки остановки;
- расчет допустимой скорости движения осуществляется с учетом тормозного пути в границах впередилежащих свободных рельсовых цепей;
- непрерывное регулирование допустимой скорости по реальному интервалу между подвижными единицами можно организовать с учетом динамики их движения.
Оснащение высокоскоростного поезда при- приемной аппаратурой многозначной АЛСЕН непрерывного типа и АЛС числового кода АЛСН обеспечивает возможность движения высокоскоростного поезда с допустимыми скоростями по сети обычных железных дорог, а также реализовать интервальное регулирование на принципах бессветофорной сигнализации с подвижными блок-участками и изменяющимся числом входящих рельсовых цепей (вариант два).
Третий способ — с координатным регулированием — позволяет достичь максимальной пропускной способности, так как интервал между поездами определяется с учетом динамических характеристик подвижного состава. В основе построения такой системы интервального регулирования движения поездов лежит использование радиоканала для связи САСУ с поездами, т.е. АЛСР. Вдоль трассы устанавливают - ся стационарные радиостанции, обеспечивающие связь с подвижным составом ВСМ на протяжении всего перегона.
Диспетчерский центр управления (ДЦУ) осуществляет автоматическое (в экстраординарных ситуациях — автоматизированное) управление движением поездов, для чего обеспечивает:
— разработку, хранение и ввод в бортовую автоматизированную систему управления поездов (БАСУ) массивов паспортных данных магистрали, рейсового задания для конкретного поезда по расписанию; информацию об ограничении скорости по условиям безопасности на различных участках пути; программное значение скорости;
— передачу тормозных и тяговых характеристик поезда и других исходных данных, необходимых для выполнения рейса;
— установку маршрута движения поездов и контроль выполнения условий безопасности;
— автоматический контроль за прохождением поездов посредством сравнения полученных по радиоканалу фактических параметров движения каждого поезда (пройденного пути, скорости, времени) с программными параметрами;
— прогнозирование поездной ситуации на ВСМ с учетом требований безопасности с помощью непрерывно функционирующей в процессе движения поездов математической модели ВСМ, включающее в анализ возможности выполнения графика без его корректирования; оценку меняющегося межпоездного расстояния; уточнение (изменение) рейсового задания; переход с автоматического на автоматизированный режим управления движением поездов из ДЦУ;
— выдачу команд на управление движением поездов.
Управление каждым отдельным поездом при выполнении планового графика движения осуществляется БАСУ поезда в соответствии с выданным рейсовым заданием и командами, передаваемыми по радиоканалу. В процессе движения в диспетчерский центр управления непрерывно поступает информация, характеризующая исполнение данным поездом планового графика движения, а также о техническом состоянии систем и агрегатов подвижного состава, путевых устройств по данным установленных на поездах устройств диагностики.
Для обеспечения непрерывной связи между поездами и центром управления вдоль трассы ВСМ в помещениях станционных постов централизации и аппаратных промежуточных пунктов устанавливаются многоканальные стационарные приемопередатчики (СПП). Количество аппаратных промежуточных пунктов определяется с учетом требования перекрытия зонами действия стационарных приемопередатчиков всей трассы ВСМ. Расстояние между ними составляет 5—12 км в зависимости от условий распространения радиоволн вдоль магистрали и определяется необходимостью получения на входе приемников требуемого уровня сигнала. Приемники СПП работают непрерывно, а их передатчики включаются по запросу БАСУ поезда или в резервном режиме по команде ДЦУ.
Поездные радиостанции также работают непрерывно и в процессе движения вдоль трассы перестраиваются на частоту одного из каналов стационарного приемопередатчика, в зоне обслуживания которого находится поезд в данный момент.
Управление движением поездов осуществляется методом интервального регулирования с подвижными промежутками между поездами, обеспечивающим поддержание при всех условиях безопасного расстояния L, которое рассчитывается как функционал от текущей скорости движения поезда и длины его тормозного пути для данного профиля трассы.
Управление движением каждого отдельного поезда осуществляется его БАСУ в автоматическом режиме в соответствии с полученным рейсовым заданием. ДЦУ осуществляет контрольные функции за движением всех поездов. Для управления и
обеспечения безопасности движения от аппаратных промежуточных пунктов на поезд непрерывно поступает необходимая информация. Структурная схема технических средств бортового оборудования для организации интервального регулирования поездов представлена на рис. 11.15.
Основу бортового оборудования составляет бортовая центральная вычислительная машина (БЦВМ), построенная на базе безопасной ЭВМ, решающая следующие задачи:
— двусторонний обмен информацией между поездом и напольными устройствами;
— расчет параметров для управления движением поезда с учетом характеристик подвижного состава, профиля пути, временных ограничений скорости на отдельных участках;
— осуществление непрерывного контроля скорости движения поезда;
— непрерывный контроль за процессом торможения с учетом реальной эффективности тормозных систем;
— обеспечение автоматического прицельного служебного торможения;
— контроль состояния машиниста;
— подачу предупредительных световых и акустических сигналов машинисту.
В основе процесса интервального регулирования движения поезда по ВСМ лежат алгоритмы функции определения координаты подвижного состава и определения

| о о |
Рис. 11.15. Структурная схема технических средств бортового оборудования для организации интервального регулирования поездов допустимой скорости из условия обеспечения безопасного интервала. Процесс определения координаты подвижной единицы производится средствами бортовой аппаратуры поезда. Получение координат подвижных единиц возможно несколькими способами:
— использованием бортовых средств спутниковой навигации;
— по одометрическим измерениям пути, пройденного от контрольных точек;
— по координатам установки напольного оборудования при их проследовании поездом (балисы, изолирующие стыки рельсовых цепей, стационарная аппаратура САУТ).
Собственно алгоритм вычисления координаты поезда сводится к определению приращения пройденного пути, которое формируется датчиком пути и скорости по отношению к контрольной точке. Вычисленное значение координаты передается соответствующим потребителям (в ДЦУ для оптимизации режима управления и затем смежным поездам с целью обеспечения безопасного интервала). Взаимодействие бортовых и стационарных устройств систем безопасности предполагается организовать по каналам сети GSM-R.
При незначительном расхождении результатов определения координат, полученных по сигналам осевых датчиков пути и скорости (ДПС) и от системы спутниковой навигации, производится коррекция координаты. При превышении величины расхождения координаты осуществляется регистрация отклонения с возможностью передачи этой информации в ДЦУ. Фактическая скорость поезда постоянно сравнивается с допустимой. Алгоритм определения допустимой скорости из условия обеспечения безопасного межпоездного интервала зависит от выбранного способа организации интервального регулирования. При централизованном регулировании движения поездов разрешенная скорость определяется из расчета обеспечения допустимого интервала между поездами с учетом длины пути служебного торможения при фактической скорости подвижного состава и его тормозных характеристик. Исходя из собственной координаты поезда и положения впереди идущего поезда, определяется действительная дистанция между ними, которая сравнивается с допустимым поездным интервалом при соответствующих характеристиках поезда. По результатам сравнения обеспечивается один из следующих режимов движения поезда:
— торможение, если допустимый интервал меньше фактического межпоездного интервала;
— сохранение параметров движения поезда при равенстве допустимого и фактического межпоездных интервалов;
— увеличение скорости поезда, если фактический межпоездной интервал больше допустимого.
Принятые на борт поезда сведения о свободное™ (занятости) пути и допустимой скорости движения с учетом временных ограничений скорости на впередилежащих блок-участках поступают в БЦВМ.
БЦВМ, получив от путевого приемопередатчика данные о свободности (занятости) впередилежащих блок-участков, на основании полученной информации о своем местоположении и скорости рассчитывает параметры движения поезда; вычисляет «кривую» торможения и передает необходимые данные о параметрах движения поезда и поездной ситуации на пульт управления и индикации машиниста — ПУИ, а также соответствующие команды в систему управления тягой и торможением поезда.
Переданные с поезда данные о номере поезда, его реальной скорости, состоянии подвижного состава поступают на станционный пост централизации и в диспетчерский центр и используются для контроля и регулирования движения поездов.
Применение бортовой микропроцессорной системы управления существенно облегчает работу машиниста, который при этом осуществляет:
— контроль работоспособности бортового оборудования; ввод исходных данных;
— выбор режима управления (автоматический или автоматизированный);
— подачу команды начала движения;
— включение экстренного торможения, в том числе и в режиме автоведения поезда;
— ведение поезда в режиме автоматизированного управления;
— управление открытием и закрытием наружных дверей вагонов поезда.
Сокращение функций машиниста, а также блокировка некоторых действий, которые при определенных условиях могут привести к аварийным ситуациям, повышает общий уровень безопасности движения поездов.
11.4. Станционные устройства автоматики и телемеханики. Диспетчерская централизация на ВСМ
В состав станционных технических средств входят автоматизированное рабочее место (АРМ) дежурного по станции (линейного диспетчера), а также базовые станции сотовой системы радиосвязи и исполнительные компьютеры, укомплектованные модулями сопряжения с бесстыковыми рельсовыми цепями, стрелочными электроприводами, светофорами. В АРМ дежурного по станции объединяются функции управления расположенными на станционном посту централизации системами микропроцессорной централизации (МПЦ) и автоматической локомотивной сигнализации.
АРМ дежурного по станции базируется на ЭВМ и включает устройства ввода/вывода информации (клавиатуру, «мышь», принтер, плоттер, цветной дисплей) и контроллер связи. Применяемые технические средства не накладывают ограничений на величину зоны действия станционного поста централизации, она определяется наличием СПЦ на магистрали, которые устраиваются только на крупных раздельных пунктах.
В зону действия (управления и контроля) каждого из станционных постов централизации ВСМ включаются объекты, расположенные как на самой станции, так и на участке магистрали, закрепленном за данным постом, в том числе и малодеятельные промежуточные станции. Контроль и управление удаленными объектами, входящими в зону действия станционного поста централизации, осуществляются техническими средствами перегонных и станционных постов централизации, в составе которых имеются специализированные безопасные исполнительные компьютеры, обеспечивающие управление движением поездов на станции.
Следует отметить, что в качестве основы автоматизированного рабочего места поездного диспетчера используются компьютеры стандартной конфигурации, которые характеризуются высокой надежностью. Подключение резервного АРМ позволяет одновременно его использовать для составления и тестирования расписаний движения поездов, и решения других задач. Электропитание вычислительных средств следует выполнять от систем на основе источников бесперебойного питания.
АРМ поездного диспетчера оборудуется как минимум тремя цветными дисплеями с размерами экранов по диагонали не менее 21 дюйма. На одном дисплее отображается общая обстановка на трассе движения поездов; на другом — увеличенное изображение выбранной диспетчером зоны с описанием состояния наземных устройств СУДП; на третьем — графики движения поездов. Как правило, в ДЦУ проектируется табло коллективного пользования на основе плазменных или жидкокристаллических панелей. Для оснащения других рабочих мест (например, АРМ системы безопасности) могут использоваться терминалы, подключаемые к специальному серверу. В качестве терминалов применяются персональные компьютеры.
Для хранения архивной и статистической информации в комплексе выделен сервер базы данных. Структура программного обеспечения СУДП соответствует стандартизованным спецификациям. Основные модули программного обеспечения (управления и контроля) предоставляют возможность:
— автоматической установки маршрутов в соответствии с расписанием движения поездов на согласованный диспетчером предстоящий период;
— приема и идентификации сигналов от поездов и наземного оборудования;
— отображения на экране компьютера графиков движения поездов с возможностью прогнозирования очередности установки маршрутов для прибывающих на станцию поездов и оперативной перестройки расписания в случае необходимости;
— обеспечения безопасности при управлении движением поездов;
— получения данных через интерфейс от системы электроснабжения для коррекции расписания в соответствии с текущими ограничениями по электропотреблению;
— информационного обслуживания пассажиров с передачей данных как по команде диспетчера, так и автоматически — из расписания.
Распределенная база данных осуществляет управление поступлением информации в режиме реального времени, обеспечивая высокую устойчивость вычислительного процесса за счет автоматической передачи функций при сбоях в работе устройств с одного рабочего места на другое.
11.5. Европейская единая система управления движением поездов
Исторически в процессе развития железнодорожного транспорта в европейских странах сформировались различные системы сигнализации и связи, разнообразные устройства обеспечения безопасности движения поездов. Как правило, эти системы и приборы, разработанные в разных странах, несовместимы в эксплуатации, что в условиях европейской интеграции стало существенным препятствием при пересечении государственных границ, затруднении для развития международных железнодорожных перевозок. В частности, приходится производить либо смену локомотивов, либо оборудовать их несколькими различными комплектами устройств обеспечения безопасности движения и автоматики, пригодными для работы на железных дорогах разных стран.
Однако такой подход не пригоден для ВСМ. Все высокоскоростные поезда как с локомотивной тягой, так и моторвагонные, построены по принципу составов постоянного формирования и расцепляются только во время ремонтных работ в условиях депо. Поезда ВСМ эксплуатируются как нераздельные подвижные единицы, без прицепки и отцепки локомотивов, что исключает их смену на границах железных дорог. В случае установки на поездах нескольких комплектов приборов, пригодных для работы на железных дорогах разных стран, бортовая аппаратура обеспечения безопасности движения существенно усложняется, что приводит к снижению ее надежности и росту стоимости. Таким образом, отсутствие единых международных стандартов системы сигнализации и управления движением поездов неблагоприятно влияет на развитие европейских высокоскоростных магистралей и ухудшает конкурентоспособность железных дорог.
С целью устранения указанных негативных факторов Международный союз железных дорог в 1991 г. стал инициатором проекта Европейской системы управления движением поездов, получившего название ETCS (European Train Control System, от англ. — Европейская система управления поездами). Основные требования к этому проекту подготовлены группой экспертов и специалистов комитета «А200» при Европейском институте железнодорожных исследований. Создание единой системы управления движением поездов на европейском уровне является важным шагом в направлении стандартизации и унификации при разработке и эксплуатации прикладных систем железнодорожной автоматики, телемеханики и связи.
Для удовлетворения разнообразных условий эксплуатации европейских железных дорог, в том числе высокоскоростных, система ETCS разрабатывается как многоуровневая и многофункциональная. Она должна быть совместимой с бортовым и путевым оборудованием существующих национальных систем сигнализации и связи железных дорог и действовать совместно с ними. Программы ETCS реализуются основными промышленными фирмами, выпускающими железнодорожное сигнальнотехническое оборудование. Их сотрудничество с комитетом «А200» определяет меморандум, подписанный в Берне в июне 1991 г.
Проект ETCS имеет экономические, коммерческие, технические, эксплуатационные и социально-политические аспекты. Использование унифицированной системы для европейских стран приводит к уменьшению затрат, поскольку она реализуется по единому стандарту. Создается емкий европейский рынок средств железнодорожной автоматики и связи с массовым выпуском стандартных и недорогих системных компонентов. Исключается монополизм поставщиков, так как разные фирмы выпускают стандартное взаимозаменяемое оборудование и конкурируют между собой, что положительно влияет на его технические характеристики и цену.
Основная коммерческая цель ETCS состоит в обеспечении безопасных и относительно дешевых перевозок пассажиров и грузов. Безопасность движения повышается за счет оборудования железных дорог автоматическими системами управления. При этом увеличиваются скорости движения и уменьшаются интервалы следования поездов до значений, приближающихся к физически возможным.
В техническом отношении проект ETCS характеризуется расширением использования микропроцессоров и электронной обработки данных, в том числе и в блоках управления стрелками и сигналами. Компьютерная техника устанавливается на борту поезда, а также в устройствах напольного оборудования и соединяется с помощью систем передачи данных.
Основной принцип построения ETCS — модульность. Система состоит из типовых блоков и может работать в различных вариантах структурной компоновки. Функциональные возможности модулей легко адаптируются в соответствии с требованиями конкретных железных дорог. Структура ETCS включает в себя подсистемы — EUROCAB, EUROBALISE, EURORAD1O.
Подсистема EUROCAB — бортовой комплекс системы ETCS, основным модулем которого является бортовой безопасный компьютер, выполняющий все вычисления, критические с точки зрения безаварийного движения поезда: допустимую скорость; расчет кривых экстренного торможения; сравнение и соответствие фактической скорости с допустимой. Компьютер также обеспечивает работоспособность поездных приборов, машин и агрегатов от момента включения до момента выключения.
Поездное оборудование содержит модуль определения времени и пройденного пути TOU. Полученные данные по специальному информационному поездному каналу (шине) передаются другим модулям, приборам и устройствам; точность этой информации во многом определяет надежность и безопасность работы системы в целом. Для эксплуатации на железных дорогах с иными (местными) устройствами автоматики и телемеханики бортовая часть ETCS дополняется модулем STM2, предназначенным для обработки информации, поступающей от существующих напольных устройств, и преобразования ее в формат системы ETCS.
Подсистема EUROBALISE является стандартной аппаратурой передачи данных с поезда на путь и с пути на поезд. Она состоит из путевой части (приемоответчика), при необходимости дополняется блоком сопряжения с путевыми сигналами и средствами централизации, и бортовой части, включающей антенну и электронную аппаратуру для приема и передачи информации. Подсистема EURORADIO обеспечивает непрерывное управление движением поездов с применением стандартной многоканальной аппаратуры подвижной радиосвязи. Диспетчерский радиоцентр, функцией которого является интервальное регулирование движением поездов, увязан с системой ETCS. Диспетчерский центр по радиоканалу получает данные о местоположении поезда и передает на поезд команды задания режима движения (расстояние до впереди идущего поезда или закрытого светофора на станции по трассе маршрута). Напольное оборудование передает на поезд информацию о параметрах пути следования поезда и о состоянии систем СЦБ. Для связи на направлениях «поезд — путь» и «путь — поезд» используются балисы или кабельные петли (шлейфы).
Система ETCS функционирует в режимах маневровых передвижений, автоматизированного и автоматического управлений и в режиме ведения поезда в соответствии с нормами железных дорог конкретной страны. При этом нет необходимости использовать сразу все возможные функции. Выбор модификаций системы достаточно гибок и зависит от размеров движения на конкретном участке, требуемого уровня безопасности и финансовых возможностей заказчика.
В зависимости от оснащения участков спецификации ETCS предусматривают пять уровней системы: нулевой, первый, второй, третий и STM (Special Transmit Module, от англ. — специальный передающий модуль).
ETCS нулевого уровня — это режим, при котором подвижная единица с бортовым устройством ETCS движется по участку, не оборудованному системой. Функции контроля ограничены постоянной проверкой скорости с целью недопущения максимальной величины, которая определяется как меньшее значение из максимально допус
тимой скорости поезда и величины, установленной для этого режима национальными правилами страны.
ETCS первого уровня (рис. 11.16) входит в группу вместе с другими системами с точечной передачей большого объема данных и динамическим контролем скорости. Основное средство передачи — приемоответчи- ки: так называемые «Eurobalise», которые транслируют среди прочего разрешение на движение и параметры железнодорожной линии при проходе над ними локомотивного приемника сигналов. Применяются приемоответчики для передачи неизменяемой информации и управляемые приемоответчики для передачи переменных данных. Приемоответчики первого типа хранят и передают на поезд ранее запрограммированную информацию, в то время как приемоответчики второго типа работают под управлением напольных электронных модулей и передают получаемую от них информацию (например, о текущем показании напольного светофора). Приемоответчики связаны между собой средствами передачи информации, т.е. в большинстве случаев приемоответчики одной группы передают информацию о расстоянии до приемоответчиков следующей группы, что обеспечивает обнаружение неисправного или отсутствующего приемоответчи- ка с помощью бортовых средств измерения пройденного пути. Кроме приемоответчиков, могут применяться устройства передачи линейного действия. Ими могут быть кабельные шлейфы «Euroloop», уложенные на подошве рельса, или устройства радиосвязи, которые используются локально для передачи на поезд информации о текущем показании расположенного впереди светофора.
В состав данных, передаваемых с пути на поезд, входят также сведения о маршруте дальнейшего следования поезда. Они необходимы в тех случаях, когда напольный светофор не дает исчерпывающей информации о маршруте. Основываясь на информации, получаемой от путевых устройств, и данных о поезде, включая сведения о его тормозных свойствах, бортовой компьютер вычисляет в каждый момент времени динамическое ограничение скорости, которое отображается в кабине машиниста и используется для контроля движения поезда.

| Сигнальныи модуль |
| Контроль свободности пути |
| Система централизации |
| Рис. 11.16. Схема принципа регулирования движения поездов при ETCS первого уровня |
Поскольку ETCS первого уровня обеспечивает регулярную передачу разрешений на движение, напольные светофоры не являются обязательными, однако в большинстве случаев их сохраняют. Хотя в общем случае эта система не имеет ограничений по скорости, ее используют преимущественно в обычном сообщении при максимально допустимой скорости примерно до 160 км/ч. Система первого уровня применяется на существующих железных доро
гах с напольными светофорами, по показаниям которых могут обращаться поезда, не оборудованные устройствами ETCS. Напольное оборудование (рельсовые цепи или шлейфы) определяет координаты поезда и передает его на центральный пост. Через точечные путевые трансмиттеры, установленные на границах блок-участков или чаще, на поезд передаются данные о характеристике участка, пройденном пути и положении предыдущего поезда. Центральный пост, имея информацию о положении всех поездов на линии, через путевые трансмиттеры передает на каждый поезд заданный скоростной режим. Бортовой компьютер считывает эти данные и постоянно ведет вычисление точки начала торможения.
В ETCS второго и третьего уровней (рис. 11.17, 11.18, соответственно) осуществляется двусторонний непрерывный обмен информацией между устройствами инфраструктуры и подвижным составом, который обеспечивает система радиосвязи Euroradio, базирующаяся на стандарте GSM-R.

| Рис. 11.17. Схема принципа регулирования движения поездов при ETCS второго уровня |

| —балиса |
| Рис. 11.18. Схема принципа регулирования движения поездов при ETCS третьего уровня |
Комплекс устройств второго уровня используется на новых линиях, где не применяются проходные светофоры и обращаются поезда, оснащенные радиопередающими системами, по которым бортовой компьютер обменивается информацией с центральным пунктом. На пути устанавливают простейшие электронные маркеры координаты трассы. Это могут быть устройства, не требующие электрического питания, работающие в пассивном режиме по радиозапросу с поезда. Характеристики трассы запрограммированы в бортовом компьютере.
Напольное оборудование определяет положение поезда на пути и передает информацию на центральный пост. Последний обрабатывает информацию и по радиоканалу передает на поезд новые данные о скоростном режиме и положении предыдущего поезда. Бортовой компьютер вычисляет точку торможения и сообщает информацию машинисту на дисплей пульта управления. От каждого путевого трансмиттера поезд получает точную координату своего положения на пути, что позволяет корректировать ошибку в вычислениях бортового компьютера.
При реализации системы ETCS третьего уровня не применяется оборудование, фиксирующее положение поезда. Координаты каждого поезда определяются на центральном посту по информации, полученной от поезда по радиоканалу. Путевой трансмиттер представляет собой простейший электронный маркер километра, передающий информацию на поезд. Характеристики трассы предварительно заносятся в бортовой компьютер. Получив от очередного путевого трансмиттера координату пути, бортовой компьютер корректирует ошибку и передает на центральный пост по радиоканалу информацию о действительном местоположении поезда. Центральный пост вычисляет для всех поездов взаимные координаты и передает бортовому компьютеру каждого из них данные по скоростному режиму и положению впереди идущего поезда. При нагоне поезда бортовой компьютер вычисляет точку начала торможения. Третий уровень ETCS предполагает отказ от напольных устройств и осуществление движения только по радиоканалу в режиме подвижного блок-участка. Преимущества системы ETCS третьего уровня — в отсутствие сложных перегонных устройств СЦБ, требующих обслуживания и ремонта, что делает ее весьма перспективной для вновь сооружаемых ВСМ. Технически предусмотрено при этом должно быть:
—наличие полностью развитой сети цифровой радиосвязи с установкой радиомачт через 5—10 км;
—наличие полностью оборудованного парка подвижного состава, так как потеря
радиосредств на движущемся объекте может привести к катастрофе;
— контроль целостности состава только локомотивными средствами с гарантией безопасности.
Таким образом, третий уровень системы ETCS рассматривается только как перспективный, зависящий в основном от политических решений в области развития систем цифровой радиосвязи. Именно развитие цифровой радиосвязи GSM-R определяет создание опытных полигонов системы ETCS, но во всех случаях стремятся сохранить традиционные системы автоматики.
Уровень STM применяется в случае, когда поезд, оборудованный ETCS со специализированным модулем передачи, движется по линии, оснащенной только национальной системой АЛС. Этот уровень, а точнее, несколько уровней (их количество определяется числом специализированных модулей STM для адаптации к национальным системам] разработаны для периода перехода на общеевропейскую систему. STM добавляют к бортовому оборудованию для обеспечения взаимодействия между соответствующей национальной системой АЛС и ETCS.
Обобщая изложенное, можно утверждать о единстве подходов в идеологии регулирования движения поездов в европейских странах. Что касается стран Азии, то в Китае, например, создана национальная система управления движением поездов CTCS — аналог ETCS.
11.6. Организация связи на ВСМ
К сетям технологической связи на ВСМ, в отличие от обычных железных дорог, предъявляются повышенные требования по качеству и объему предоставляемых услуг. Особенности организации связи на ВСМ обусловлены высокими скоростями движения поездов (более 300 км/ч) и наличием интенсивных помех, создаваемых силовым электрооборудованием инфраструктуры и подвижного состава.
Традиционно на железных дорогах, в том числе на ВСМ, используют проводную и радиосвязь. Сети проводной связи организуются при помощи кабельных и волоконно- оптических линий и по своему назначению подразделяются на два основных вида:
— общетехнологическую связь (ОбТС), предназначенную для ведения служебных переговоров между работниками, находящимися на одной или на разных станциях;
— оперативно-технологическую связь (ОТС), предназначенную для оперативного управления процессами перевозок (для переговоров поездного диспетчера со всеми раздельными пунктами, входящими в обслуживаемый им участок, для оперативного руководства электроснабжением, контроля продвижения подвижного состава по участку и др.].
При помощи средств проводной связи на ВСМ также организуется связь для обеспечения служебных переговоров руководителей ремонтных бригад (пути, электрификации и электроснабжения, автоматики и телемеханики, гражданских сооружений), обслуживающих объекты инфраструктуры на перегоне; с дежурными по станциям, ограничивающим данный перегон, а также с другими работниками ВСМ. Телефонные аппараты устанавливаются на опорах контактной сети и вблизи крупных искусственных сооружений.
Сети железнодорожной технологической радиосвязи по своему назначению делятся на четыре основных вида:
— поездная радиосвязь (ПРС), которая осуществляет обмен информацией между поездным диспетчером (дежурным по станции) и машинистами, связь машинистов между собой и с другими абонентами, обеспечивающими поездную работу; для организации ПРС используются стационарные (PC) и возимые (локомотивные) радиостанции (РВ), которые устанавливаются, соответственно, в помещениях диспетчеров и в поездах;
— станционная радиосвязь (СРС) служит для оперативного управления технологическими процессами на станциях;
— ремонтно-оперативная радиосвязь (РОРС) предназначена для организации служебных переговоров и обмена данными при производстве ремонтно-восстановительных работ на объектах инфраструктуры ВСМ, в том числе, для связи с сигналистами, ограждающими место проведения работ; работники ремонтных бригад оснащаются носимыми радиостанциями (PH);
— радиосвязь передачи данных (РСПД) обеспечивает прием и передачу данных о техническом состоянии объектов инфраструктуры и подвижного состава ВСМ.
При организации сетей технологической радиосвязи используются три режима связи.
1. Одночастотный симплексный режим (simplex), при котором передача и прием информации осуществляется поочередно на одной и той же частоте. Связь между радиостанциями, как правило, организуется напрямую без использования ретранслятора (базовой стации). Радиостанции оснащаются специальным переключателем — тангентой, подключающим антенну радиостанции либо к передатчику (режим передачи — тангента нажата), либо к приемнику (режим приема — тангента отпущена).
2. Полудуплексный (двухчастотный симплексный) режим (half-duplex), при котором передача информации осуществляется на одной частоте, а прием — на другой. Как и в одночастотном симплексном режиме, информация передается и принимается поочередно. Связь между радиостанциями, как правило, организуется при помощи ретранслятора, приемник которого работает на частоте передачи радиостанций, а передатчик, — соответственно, на частоте приема. Радиостанции также оснащаются тангентой.
3. Дуплексный режим (duplex), при котором передача и прием информации осуществляется одновременно на разных частотах. Связь между радиостанциями организуется с использованием ретранслятора. Тангента у радиостанций отсутствует.
Симплексный и полудуплексный режимы характерны для аналоговых систем радиосвязи, дуплексный режим — для цифровых.
В сетях проводной и радиосвязи возможны такие виды информационного обмена, как передача речи (для аналоговых и цифровых систем) и передача данных (только для цифровых систем). Причем для передачи речи могут использоваться три типа вызова:
— индивидуальный вызов (individual call), устанавливающий двухточечное двунаправленное соединение между вызывающим и вызываемым абонентами;
— групповой вызов (group call), устанавливающий многоточечное двунаправленное соединение между вызывающим абонентом и несколькими вызываемыми абонентами, которое организуется при использовании группового номера, присваиваемого каждому из членов группы;
— широковещательный вызов (broadcast call), осуществляющий одностороннюю передачу информации от вызывающего абонента нескольким вызываемым абонентам.
Для передачи речевых соообщений и данных в сетях технологической связи применяются два основных режима соединения (коммутации).
1. Коммутация каналов (circuit switching) — режим соединения, при котором по запросу вызывающего абонента на физическом уровне устанавливается временное соединение с вызываемым абонентом, и данному соединению на весь период связи выделяется фиксированная полоса пропускания. Основным достоинством данного режима является полное отсутствие перегрузок сети, недостатком — неэффективное использование ресурса связи.
2. Коммутация пакетов (packet switching) — режим соединения, при котором передаваемое сообщение разбивается на фрагменты (пакеты), каждый из которых последовательно, один за другим, пересылается адресату независимо, возможно разными
путями. В пункте назначения происходит сборка передаваемого сообщения из поступивших пакетов. Данный режим позволяет занимать канал только на время передачи пакета, после чего он освобождает для передачи других пакетов.
Для организации сетей технологической радиосвязи на ВСМ в настоящее время используются транкинговые и сотовые системы связи, реализующие двунаправленную радиосвязь между фиксированным компонентом системы — базовыми станциями (БС), и подвижным компонентом — подвижными (мобильными) станциями (ПС), которые перемещаются по территории, обслуживаемой системой БС. Зону обслуживания одной БС символически обозначают правильным шестиугольником — сотой. Площадь одной соты (зона обслуживания одной БС) намного меньше территории обслуживания всей системы, что позволяет значительно уменьшить мощность радиопередатчиков БС и ПС. Разделение территории обслуживания системы на соты, выделение каждой соте подгруппы каналов и возможность изменения мощности БС дают возможность реализовать гибкую структуру системы, учитывающую интенсивность трафика на данной территории в данный момент времени.
Еще на первых ВСМ в Японии, затем во Франции большое внимание было уделено организации надежной радиосвязи между диспетчерами и машинистами высокоскоростных поездов. На первых японских и французских высокоскоростных поездах появилась такая необычная новая коммерческая услуга для пассажиров как междугородняя телефонная связь из движущегося поезда. Для этого между поездом и стационарными АТС были организованы радиоканалы, а в вагонах были установлены телефоны-автоматы. В непрерывном улучшении качества этой связи они эксплуатировались до конца 90-х годов прошлого столетия, когда распространение общедоступной сотовой связи и увеличение зоны ее покрытия, которая охватила все линии ВСМ, сделало нерентабельным содержание в поездах ВСМ междугородных телефонов- автоматов и они были демонтированы.
К началу развития ВСМ на европейских железных дорогах в эксплуатации находилось более 20-ти различных и несовместимых между собой систем управления движением поездов, в каждой стране действовали свои правила эксплуатации железных дорог (которые иногда даже противоречили друг другу), национальные требования по сертификации безопасности, системы подготовки и лицензирования машинистов, применялись пять различных систем тягового электроснабжения и использовались восемь различных, несовместимых между собой систем проводной и радиосвязи.
Решить проблему эксплуатационной совместимости и безопасности систем обеспечения движения поездов на европейских ВСМ было призвано внедрение Европейской системы управления движением поездов ETCS (European Train Control System), которая, вместе с системой цифровой железнодорожной радиосвязи стандарта GSM-R (Global System for Mobile Communications Railways — Глобальная система подвижной связи на железнодорожном транспорте), входит в состав Европейской системы управления железнодорожными перевозками ERTMS (European Rail Traffic Management System). При этом система сотовой связи GSM-R (рис. 11.19) используется как в качестве технологической железнодорожной радиосвязи (ПРС, СРС, РОРС), так и в качестве канала связи между напольным и поездным оборудованием (РСПД).
Стандарт GSM-R является основой для построения Европейской интегрированной железнодорожной радиосети с расширенными возможностями EIRENE (European Integrated Railway Radio Enhanced Network) — европейского проекта, целью которого является разработка требований железных дорог ЕС к сетям железнодорожной радиосвязи. В рамках данного проекта были выпущены два основополагающих документа, определяющих функциональные (Func-

| Рис. 11.19. Базовая станция GSM-R на высокоскоростной магистрали Нюрнберг — Ингольштадт. Германия. 2010 г. |
GSM-R является вариантом реализации стандарта GSM — системы сотовой связи второго поколения (2G — generation, англ.: поколение). К первому поколению относятся разнообразные (не совместимые между собой) системы, преимущественно, аналоговых стандартов, разработанные к началу 1980-х гг. в различных странах мира. Разработка стандарта GSM началась в 1982 г., а первые технические условия были изданы в 1990 г. Европейским институтом стандартизации в области телекоммуникаций (European Telecommunications Standards Institute, ETSI). Для обеспечения требований, предъявляемых со стороны железнодорожного транспорта, в стандарт GSM было внесено около 90 дополнений, наиболее важными из которых являются обеспечение группового и широковещательного вызова, возможность установления приоритетов и обеспечение экстренного вызова. В настоящее время промышленностью разных стран выпускается разнообразная аппаратура связи стандарта GSM-R (рис. 11.20).
Наряду со стандартом GSM-R на ВСМ также используется стандарт цифровой транкинговой связи TETRA (Terrestrial Trunked Radio — Наземное транкинговое радио), который так же, как и стандарт GSM, разработан институтом ETSI. Разработка стандарта была начата в 1994 г., а первые спецификации появились в 1996 г. TETRA, в отличие от GSM-R, является открытым стандартом, т.е. доступ к спецификациям открыт для всех заинтересованных сторон, которыми являются, прежде всего, производители оборудования.
TETRA, помимо стандартного режима, позволяет абонентам работать в режиме непосредственной («прямой») связи (Direct Mode Operation, DMO), когда между подвижными станциями могут устанавливаться двух- и многоточечные соединения по радиоканалам напрямую, минуя базовые станции. При этом, подвижные станции могут работать в режиме так называемого «двойного наблюдения» («Dual Watch»), при котором возможен информационный обмен с абонентами, работающими как в сетевом (транкинговом) режиме, так и в режиме непосредственной (прямой) связи.
Изначально сети стандарта GSM-R обеспечивали соединение только в режиме коммутации каналов. Для обеспечения соединения в режиме коммутации пакетов была разработана технология GPRS (General

| Рис. 11.20. Примеры аппаратуры системы GSM-R: а — портативное переговорное устройство для кабины машиниста; б — контейнер с приборами поездного комплекта GSM-R; в — графический дисплей приема и передачи данных GSM-R для кабины машиниста |
Системы радиосвязи 3G и 4G (3-го и 4-го поколений) предоставляют подвижным абонентам ВСМ возможность передавать данные со скоростями, которые сопоставимы со скоростями, возможными в сетях проводной (фиксированной) связи — десятки и сотни Мбит/с. Наиболее распространенным представителем систем 3G является технология UMTS (Universal Mobile Telecommunications System — Универсальная система мобильной связи), позволяющая абонентам передавать данные со скоростью до 2 Мбит/с. Развитие данной тех-
| Радиотелефонная связь и передача телеметрической информации |
| Wi-Fi | |
| Т 1Г1 Сотовые Локальные | |
| 1 Ш h | |
| Wi-Fi - | |
| 1 | а. |
|
|
| Кассовый терминал оплаты электронными платежными средствами |
| Система учета продаж и бухгалтерия |
| Систем национального мониторинга движения поездов |
| Система резервирования и продажи билетов |
| Бортовая информационная система поезда |
| Информация о положении поездов в реальном масштабе времени на информационных табло на вокзалах и в сети Интернет |
| ■ Информации о движении поезда . |
| Электронные |




Рис. 11.21. Информационное обеспечение поезда «Асе1а» (без устройств и систем обеспечения безопасности и управления движением). США. 2010 г.
нологии привело к появлению ее модификации — HSPA (High-Speed Packet Access — Высокоскоростная пакетная передача данных), использование которой позволяет повысить базовую скорость передачи данных до 14 Мбит/с. Представителями систем 4G, скорость передачи данных в которых может достигать сотен Мбит/с, на сегодняшний день являются две технологии:
LTE («Long Term Evolution» — «Развитие на длительный период»), являющая развитием технологии UMTS/HSPA;
WiMAX («Worldwide Interoperability for Microwave Access» — «Глобальный доступ при помощи микроволновой связи») — группа стандартов IEEE 802.16[58].
Наряду с указанными стандартами на ВСМ, в том числе, для внутрипоездной связи и обеспечения доступа пассажиров к сети Интернет, используются такие технологии радиосвязи, как:
- DECT (Digital Enhanced Cordless Telecommunications (standard) — Усовершенствованный стандарт цифровой беспроводной связи;
— Bluetooth[59] — группа стандартов IEEE 802.15;
— Wi-Fi[60] — группа стандартов IEEE 802.11 и др.
В последние десятилетия важным направлением развития связи на объектах ВСМ, наряду с решением вопросов организации движения и обеспечения безопасности на ВСМ, подробно рассмотренных в предыдущих параграфах данной главы,
стало удовлетворение разнообразных информационных потребностей пассажиров. В условиях борьбы на рынке транспортных услуг различных перевозчиков, предоставление пассажирам устойчивой и доступной мобильной связи, включая возможность работы в Интернете, стало важным фактором выбора пассажиром того или иного транспортного оператора.
На примере организации информационного обеспечения высокоскоростных поездов «Асе1а» (США) рассмотрим круг вопросов информационного обеспечения, решаемых на борту поезда (рис. 77.27).
С помощью сотовых радиоканалов и спутниковой связи информация о движении поезда в реальном масштабе времени передается в национальную систему мониторинга движения поездов, а оттуда поступает в сеть Интернет на соответствующие страницы сайта железнодорожной компании и в информационные системы вокзалов по маршруту следования поездов для отображения на информационных табло и использования справочными службами.
Пассажирам в вагонах поезда предоставляется возможность подключения собственных компьютеров к сети Интернет с помощью устройств беспроводного доступа (WiFi). Имеется бортовая информационная сеть для пассажиров поезда, с помощью которой передается актуальная информация о следовании по маршруту и транслируются развлекательные музыкальные и видео программы. С помощью сотовых телефонов и компьютеров пассажиры могут воспользоваться системой резервирования и продажи билетов на разные виды транспорта, бронирования гостиниц, заказа такси.
Бортовая информационная система поезда обслуживает также кассовые терминалы для совершения пассажирами покупок товаров и услуг с помощью электронных платежных средств.
Наряду с технологиями наземной радиосвязи на ВСМ также активно используются различные системы спутниковой связи (Inmarsat, Iridium, Globalstar и др.), основным преимуществом которых является обеспечение зоны обслуживания значительных размеров, а также возможность организации независимого от наземной инфраструктуры канала связи в чрезвычайных ситуациях.
Библиография
1. Алексеев Л. Е. Тяговые электрические машины и преобразователи. — Л.: Энергия. 1977. — 444 с.
2. Бурков А.Т. Электронная и преобразовательная техника: учебник для вузов ж.-д. трансп. — М., 2001. —464 с.
3. Вальднер С.С. Сверхскоростной поезд. — М.: Трансжелдориздат, 1941. — 67 с.
4. Варнавский В.Г. Концессионный механизм партнерства государства и частного сектора. Серия «Научные доклады: независимый экономический анализ». № 146. — М.: Московский общественный научный фонд ИМЭМО РАН, 2003. — 270 с.
5. Вейнбер Б.Л. Движение без трения (безвоздушный электрический путь). — СПб.: Естествоиспытатель, 1914. — 56 с.
6. Габарда Д. Новые транспортные системы в городском общественном транспорте. — М.: Транспорт, 1990. — 216 с.
7. Гопал К.Дюбай. Основные принципы устройства электроприводов: пер. с англ. — М.: Техносфера, 2009.—431 с.
8. Гуткин Л.В., Дымант Ю.Н., Иванов П.А. Электропоезд ЭР200. — М.: Транспорт, 1981. — 192 с.
9. Гурьев А.И. И какие же русские не любили быстрой езды? История обреченного проекта. — СПб.: КОСТА, 2009. — 360 с.
10. Железнодорожный транспорт. Энциклопедия / Гл. ред. Н.С. Конарев. — М.: Большая Российская энциклопедия, 1994. — 560 с.
11. Железные дороги колеи 1520 мм. Строительно-технические нормы (СТН Ц-01—95). — М.: МПС РФ. 1995.
12. Железные дороги: общий курс / М.М. Уздин и др.; под ред. М.М. Уздина. — 5-е изд., перераб. и доп. — СПб.: Выбор, 2002. — С. 303—304.
13. Зеленский Ю.И. Скоростное пассажирское движение. — М.: Трансжелдориздат, 1957. — С. 72.
14. Изыскания и проектирование железных дорог: учебник для вузов / И.В. Турбин, А.В. Гавриленков, И.И. Кантор и др.; под ред. И.В. Турбина. — М.: Транспорт, 1989. — 479 с.
15. Инфраструктура линии Санкт-Петербург—Москва для высокоскоростного движения поездов. Стандарт ОАО «РЖД». — М.: ОАО «РЖД», 2007. — 178 с.
16. Кантор И.И. Продольный профиль пути и тяга поездов. — М.: Транспорт, 1984. — 207 с.
17. Каргин Д.И. Ширина железнодорожной колеи (из истории железных дорог). Ч. 1 // Техника и экономика путей сообщения. — 1920. — № 1. — С. 81—94; Ч. II // Там же. — № 2. — С. 79—86.
18. Киселев И.П. Высокоскоростной сухопутный транспорт: состояние и перспективы // Транспорт Российской Федерации. — 2010. — № 6 (31). — С. 60—66.
19. Киселев И.П. Высокоскоростные железнодорожные магистрали. Важнейшие характеристики, технические решения и перспективы развития // Железнодорожный транспорт. — 2011. — № 5. — С. 73—77; №6. — С. 83—91; № 7. — С. 73—77.
20. Киселев И.П. История скоростных сухопутных нетрадиционных видов пассажирского транспорта // История науки и техники. — 2006. — № 8. — С. 2—12.
21. Киселев И.П. Монорельсовые транспортные системы на воздушной подушке // История науки и техники. — 2006. — № 9. — С. 19—26.
22. Киселев И.П. Прогресс высокоскоростного железнодорожного движения // История науки и техники. — 2006. — № 5. — С. 68—74; № 6. — С. 74—77; № 8. — С. 87—93.
23. Киселев И.П. Скоростные монорельсовые пассажирские транспортные системы с использованием магнитного подвешивания // История науки и техники. — 2006. — № 12. — С. 2—25.
24. Киселев И.П. Этапы развития систем железнодорожной автоматики, телемеханики и связи и высокоскоростное движение // Промышленные АСУ и контроллеры. — 2010. — №6. — С. 56—69.
25. Киселев И.П., Сотников Е.А., Суходоев В.С. Высокоскоростные железные дороги. — СПб.: ПГУПС, 2001. —С. 17.
26. Киселев И.П., Титова Т.С. Экологические аспекты высокоскоростного железнодорожного транспорта. — СПб.: ПГУПС, 2005. — 50 с.
27. Концепции проекта высокоскоростной железнодорожной магистрали «Москва— Санкт-Петербург» BCM 1. — М.: ОАО «Скоростные магистрали», 2011. — 47 с.
28. Котельников А.В. Электрификация железнодорожных дорог. Мировые тенденции перспективы. — М.: Интекст, 2002. — 104 с.
29. Лазарян В.А. О математическом моделировании движения поезда по переломам продольного профиля / В.А. Лазарян, Е.П. Блохин // Труды МИИТа. Вып. 444. — М., 1974. — С. 83—123.
30. Лауэр К.Б. Американские железные дороги и их эксплуатация. — М.: Трансжелдориздат, 1936. —259 с.
31. Лемещук П.К, Ганкин Н.Б. Перспективы скоростного движения // Железнодорожный транспорт. — 1965. — № 7. — С. 7.
32. Линия на магнитном подвесе из Токио в Осаку // Железные дороги мира. — 2011. — № 8. — С. 2.
33. Лопатников Д.И. Оценка степени хозяйственного развития территории // Известия РАН. Серия географическая. — 1997. — № 2. — С. 85—88.
34. Мазур И.И., Молдаванов О.И. Курс инженерной экологии. — М.: Высшая школа, 1999. — 123 с.
35. Манасарян Г.Г. Монорельсовый транспорт. — Ереван: Айастан, 1976. — 80 с.
36. Маслов Н.Н. Охрана окружающей среды на железнодорожном транспорте. — Л.: ЛИИЖТ, 1991. —С. 12.
37. Муратов Д.Г. На основе контракта жизненного цикла // Железнодорожный транспорт. — 2010. —№6. —С. 47—49.
38. ОАО «Скоростные магистрали» представит проект развития высокоскоростного железнодорожного движения в РФ // Информационный портал «РЖД — партнер». — 9 ноября 2010.
39. Положение о составе разделов проектной документации и требованиях к их содержанию. Утверждено Постановлением Правительства РФ от 16.02.2008 г. № 87.
40. Правила технической эксплуатации железных дорог Российской Федерации. Утверждены приказом Минстранса России от 21 декабря 2010 г. № 286. — М.: Омега-Л, 2012. — 173 с.
41. Правила технической эксплуатации железных дорог Союза ССР. МПС СССР. — М.: Транспорт, 1970.— 120 с.
42. Приказ Министерства транспорта Российской Федерации от 4 июня 2012 г. № 162 «О внесении изменений в Правила технической эксплуатации железных дорог Российской Федерации, утвержденные приказом Министерства транспорта Российской Федерации от 21 декабря 2010 г. № 286» // Бюллетень нормативных актов федеральных органов исполнительной власти. — №36, 3 сентября 2012 г. — С. 156—160.
43. Разъяснения о порядке применения Положения о составе разделов проектной документации и требованиях к их содержанию. Письмо Министерства регионального развития РФ от 22.06.2009 г. № 19088. СК/08.
44. Раков В.А. Локомотивы отечественных железных дорог: 1845—1955. — 2-е изд., перераб. — М.: Транспорт, 1995. — 564 с.
45. Рогинский Н.О. Железнодорожная сигнализация и обеспечение безопасности следования поездов. В 2 вып. — М.: Транспечать, 1928. Вып. 1. — 308 с.; Вып. 2. — 293 с.
46. Скоростное движение пассажирских поездов на железных дорогах зарубежных стран // Технико-экономический обзор работы и технической оснащенности зарубежных дорог. Вып. 27. — М.: ЦНИИТЭИ МПС, 1970. — 68 с.
47. Скоростной и высокоскоростной железнодорожный транспорт. В прошлом, настоящем и будущем. К 150-летию железнодорожной магистрали Санкт-Петербург — Москва. Т. 1. — СПб.: Информационный центр «Выбор», 2001. — 320 с.
48. Скоростной и высокоскоростной железнодорожный транспорт. Сооружения и устройства. Подвижной состав. Организация перевозок (обобщение отечественного и зарубежного опыта). Т. 2. — СПб.: Информационный центр «Выбор», 2003. — 448 с.
49. Сотников Е.А. Железные дороги мира: из XIX в XXI век. — М.: Транспорт, 1993. — 200 с.
50. Специальные технические условия (СТУ) для проектирования, строительства и эксплуатации новой высокоскоростной пассажирской железнодорожной магистрали «Москва — Санкт- Петербург». Согласованы решением Министерства регионального развития РФ от 28.07.2009 г. №23683. ИП/08.
51. Стратегия развития железнодорожного транспорта в Российской Федерации до 2030 года. Утверждена распоряжением Правительства Российской Федерации от 17 июня 2008 г. № 877. — М.,
2007. — 70 с. прил.
52. Строительно-технические нормы Министерства путей сообщения Российской Федерации «Железные дороги колеи 1520 мм» СТН Ц-01—95. — М., 1995. — С. 5.
53. Суходоев В.С. Станции высокоскоростных и скоростных железных дорог. — СПб: ПГУПС, 1999. — 130 с.
54. Технический регламент о безопасности высокоскоростного железнодорожного транспорта. Утвержден постановлением Правительства РФ от 15.07.2010 г. № 533 // Собрание законодательства РФ. — 26.07.2010 г., № 30. — С. 4106.
55. Токосъем и тяговое электроснабжение при высокоскоростном движении на постоянном токе: сб. научн. тр. ОАО «ВНИИЖТ» / Под. ред. Н.В. Мироноса, П.Г. Тюрина. — М.: Интекст, 2010. — 192 с.
56. Указ Президента Российской Федерации от 16 марта 2010 г. № 321 «О мерах по организации движения высокоскоростного железнодорожного транспорта в Российской Федерации» // Российская газета— 2010,19 марта.
57. Ульянов А.А., Емец В.А., Куренков П.В. Экономическая оценка организации высокоскоростного сообщения по направлению Москва — Самара // Экономика железных дорог. — 2010. — № 11. — С. 11—23.
58. Федеральный закон Российской Федерации «О техническом регулировании» от 27.12.2002 г. № 184-ФЗ (ред. от 28.07.2012 г.) // Российская газета. — 2002. — № 245 от 31 декабря.
59. Циолковский К.Э. Сопротивление воздуха и скорый поезд. — Калуга, 1927. — 54 с.
60. Шотлендер Я.В. История паровоза за сто лет: 1803—1903. — СПб.: Тип. Кушнерев, 1905. — 440 с.
61. Электрифицированные железные дороги России (1929—2004 гг.) / Под общ. ред. П.М. Шилкина. — М.: Интекст, 2004. — 336 с.
62. Электрические железные дороги: учебник для вузов ж.-д. транспорта / В.А. Кисляков, А.В. Плакс, В.Н. Пупынин и др.; под ред. А.В. Плакса и В.Н. Пупынина. — М.: Транспорт, 1993. — 281 с.
63. Электроподвижной состав с электрическим торможением: учебное пособие для вузов ж.-д. транспорта / В.Н. Жуликов, IO.M. Иньков, Л.Г. Козлов и др.; под ред. Ю.М. Инькова и Ю.И. Фельдмина. — М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте»,
2008. — 412 с.
64. Allen G.F. The world's fastest trains from age of steam to the TGV. — 2-nd ed. — Sparkford: Patrick Stephens Limited, 1992. — 192 p.
65. AVE Construyendo futuro. — Madrid: Alta Velocidad Espanola, 1991. — 326 p.
66. Commission Decision 2001/260/EC of 21 March 2001 on the basic parameters of the commandcontrol and signaling subsystem of the trans-European high-speed rail system referred to as «ERTMS characteristics» in Annex II (3) to Directive 96/48/EC [Official Journal L 93 of 03.04.2001].
67. Commission Decision 2008/163/EC of 20 December 2007 concerning the technical specification of interoperability relating to safety in railway tunnels in the trans-European conventional and high-speed rail system [Official Journal L 64 of 7.3.2008].
68. Commission Decision 2008/164/EC of 21 December 2007 concerning the technical specification of interoperability relating to persons with reduced mobility in the trans-European conventional and highspeed rail system [Official Journal L 64 of 7.3.2008].
69. Commission Decision 2008/217/EC of 20 December 2007 concerning a technical specification for interoperability relating to the infrastructure sub-system of the trans-European high-speed rail system [Official Journal L 77 of 19.3.2008].
70. Contact Lines for Electric Railways: Planning, Design, Implementation Maintenance / by Friedrich Kiessling, Rainer Puschmann, Axel Schmieder, Egid Schneider. — Erlangen, Publicis Publishing, 2009. — 994 p.
71. Cooper B. Intercity 125. The World's Fastest Diesels. — Shepperton: lan Allan Ltd., 1987. — 80 p.
72. Fletcher M., Taylor J. Railways: The Pioneer Years. — London: Chartwell Books Inc., 1990. — 320 p.
73. High Speed lines in the World — UIC High Speed Department Updated 1st July 2012.
74. High speed rail: Fast track to sustainable mobility // UIC: Paris, 2012. — 36 p.
75. Hollingsworth B. Steam Passenger Locomotives. — London: Tiger Books International PLC, 1982. — 208 p.
76. Hollingsworth B., Cook A. The great book of trains. — London: Tiger Book International, 1987. — 414 p.
77. Hughes M. Rail 300: The world high speed train race. — London: David & Charles, 1988. — 192 p.
78. ICE. High-tech on rails. — Darmstadt: Hestra-Verlag, 1986. — 176 p.
79. Knopperts IV. // Материалы презентации докладов на Всемирном конгрессе по высокоскоростному железнодорожному движению. — Амстердам, 2008.
80. Lacote F. High-speed Trains and the environment. Third World Congress on High-speed Rail. — Berlin, 1998.— P. 231.
81. Marshall J. The Guinness railway fact book. — Enfiield: Guinness Publishing, 1994. — 192 p.
82. Nakazawa Ni. Approach of JR Central on global environmental issues // Japanese Railway Engineering. — 2002. — № 148. — P. 5
83. Necessities for future high speed rolling stock / Report. — Paris: U1C, 2010. — 42 p.
84. Patterson]. Air emission reductions from aviation // Third World Congress Third World Congresson High-speed Rail. — Berlin. 1998. — P. 232.
85. Pyrgidis Ch. High-speed lines and the environment // Rail Engineering International. 1993. № 4. — p. 13—17.
86. Reducing the external costs of transport. International Union of Railways. — Paris. 1995. — P. 6.
87. Takagi R. High-speed Railways. The Last 10 Years // Japan Railways & Transport Review. — 2005. — № 3. — P. 4—7.
88. The Oxford Companion to British Railway History / Edited by Jack Simmons & Gordon Biddle. Oxford University Press, 1997. — 592 p.
89. V150: Le train de l'excellence. — Saint-Ouen, 2007. — 108 p.
90. Yokoyama A. Infrastructure for highspeed lines in Japan // International Practicum on Implementing High Speed Rail in United States. — UIC, APTA, б. m., 6. r.
Источники иллюстраций
Блажко Л.С.: 6.7, 6.10, 6.58, 6.59, 6.60; Бурков AT.-. 10.1, 10.2, 10.3, 10.4, 10.5, 10.6, 10.7, 10.10, 10.19,
10.20, 10.22, 10.23, 10.24, 10.26, 10.27, 10.28, 10.32а, 10.33, 10.34, 10.37, 10.38, 10.39, 10.40, 10.41, 10.42, 10.43, 10.49; Бушуев Н.С.: 5.3, 5.4, 5.5, 5.6; Восточная японская железнодорожная компания (East Japan Railway Company): 3.12, 3.16, 3.18; Гурьев А.И. И какие же русские не любили быстрой езды? История обреченного проекта. - СПб.: КОСТА, 2009: 5.2; Защита населения от повышенного шумового воздействия // Сборник докладов Второй всероссийской конференции. — СПб., 2009: 3.11; Западная японская железнодорожная компания (West Japan Railway Company): 6.28; Киселев Н.П.-. 1.19, 1.22, 1.28, 1.29, 1.30, 1.31, 1.32, 1.33, 2.5, 2.7, 2.8, 2.14, 3.2, 3.4, 3.12, 3.13, 3.16, 3.18, 4.1, 4.2, 4.3, 4.4, 4.5, 4.6, 5.1, 6.1, 6.7, 6.10, 6.28; 8.8, 8.9, 8.12, 8.23, 8.34, 10.7, 10.9, 10.10, 10.16, 10.19,
10.21, 10.22, 10.23, 10.28, 10.32, 10.35, 10.36, 10.37, 10.51, 10.52, 11.5,11.6, 11.7а, 11.8а, 11.19, 11.21; Кубо С.: 8.6; Международный союз железных дорог: 3.2, 3.4, 3.7, 4.4, 4.5, 4.6, 6.3, 8.1, 8.7,11.3; Министерство железных дорог КНР: 1.23, 3.15, 8.3, 8.13; Никитин А.Б.: 11.1,11.2, 11.13, 11.14, 11.15, 11.16, 11.17,11.18; ОАО «Российские железные дороги» 1.32; ОАО «Скоростные магистрали» 1.33; Российский государственный архив экономики: 2.4; Скоростной и высокоскоростной железнодорожный транспорт: в 2 т. Т.1. — СПб.: Выбор, 2001: 1.1, 1.7, 1.8, 1.9, 1.10, 1.11, 1.12, 1.13, 1.14, 1.15, 1.16, 1.17, 1.18, 1.26, 1.27; Скоростной и высокоскоростной железнодорожный транспорт: в 2 т. Т.2. — СПб.: Выбор, 2003: 2.11, 2.12, 6.6, 6.17, 6.52в, 6.53, 8.15, 8.23, 9.3, 9.4, 9.5, 9.7,10.8,10.11, 10.12,10.13,10.14, 10.15; Скоростные железные дороги Японии: Синкансен / Т. Тосихико, К. Сатоси, И. Есио и др. / Пер. с японск. под ред. В.Г. Альбрехта. — М.: Транспорт, 1984: 6.27, 10.21, 10.44; Соколова С.А. Повышение скоростей движения на железных дрогах (до середины XIX века). История машиностроения // Труды Ин-та истории естествознания и техники Акад, наук СССР. Т. 45. — М.: Изд-во Акад, наук СССР, 1962. 1.2; Суходоев В.С.: 9.1, 9.2, 9.6; Фролов Ю.С. Тоннели на высокоскоростных железнодорожных магистралях // Транспорт РФ. 2010, №1 (26): 8.25, 8.44; Центральная японская железнодорожная компания (Central Japan Railway Company): 3.3,3.13, 3.14,3.17,6.9,6.26,8.36,10.9,10.16,10.17; Центральный музей железнодорожного транспорта РФ: 2.5; Японская железнодорожная компания Кюсю (Kyushu Railway Company): 6.29, 6.30,10.53,11.4,11.7д; ADIF // Презентация доклада на Российско-испанском семинаре по проблемам ВСМ. Москва, 2011: 6.5.а, 6.54, 10.46; Allen G.F. The world’s fastest trains from age of steam to the TGV. — 2-nd ed. — Sparkford: Patrick Stephens Limited, 1992:
1.3; Alstom / Альстом в России / http://www.hsrail.ru/abouthsr/trains/ 1.20; Ansaldo STS/ Презентация доклада на Российско-итальянском семинаре по ВСМ. Москва, 2011: 10.306; AVE Construyendo futuro. — Madrid: Alta Velocidad Espanola, 1991: 6.8, 6.52a, 6, 6.56, 8.4, 10.18, 10.50, 11.86; Bogl: 6.35, 6.36, 6.37; 6.38, 6.39, 6.40, 6.41, 6.42; DB AG: 6.13, 6.14, 10.29a; Feldwisch W. High Speed Rail in Practice. New projects in Germany // Презентация доклада на Всемирном конгрессе по высокоскоростному железнодорожному движению. — Амстердам, 2008: 8.17; Fletcher М., Taylor J. Railways: The Pioneer Years. — London: Chartwell Books Inc., 1990: 1.4, 1.5, 1.6, 2.1; Gago V. New Design Criteria for Spanish HS Network Extension // Презентация доклада на Всемирном конгрессе по высокоскоростному железнодорожному движению. — Амстердам, 2008: 8.42; Glover М. Channel Tunnel Rail Link (CTRL) // Презентация доклада на Всемирном конгрессе по высокоскоростному железнодорожному движению. — Амстердам, 2008: 8.10, 8.24; High Speed in the Low Land. — Zoetemeer: InfraSpeed, 2006: 3.19, 8.39, 8.40, 8.41, 11.7b, r, 11.10; High Speed Rail. Fast track to sustainable mobility. — Paris: UIC, 2010:
I. 25, 3.2, 3.4; ICE. High-tech on rails. — Darmstadt: Hestra-Verlag, 1986: 8.11,8.19; Kiefiling F., Puschmann R., Schmieder A. Contact Lines for Electric Railways. — Erlangen: Siemens: 10.35, 10.36, 10.51, 10.52; Knopperts W. Evaluating the Model for Risk-sharing and the Role of Private Funding in Infrastructure // Презентация доклада на Всемирном конгрессе по ВСМ. — Амстердам, 2008:8.5; Mccampbell L. Recent Developments in on Board Systems. — Amtrak, U S // Презентация доклада на Всемирном конгрессе по ВСМ. — Филадельфия, 2012: 11.21; ОВВ — Рогг: 6.43, 6.44, 6.45, 6.46, 6.47; Pathmamanoharan А. Taiwan High Speed Line, precursor of Asian High Speed / Презентация доклада на Всемирном конгрессе по ВСМ. — Амстердам, 2008: 6.51, 6.55; Perez-Fabregat L. М. Н. S. L. in Spain / Презентация доклада на Всемирном конгрессе по ВСМ. — Амстердам, 2008: 8.2, 8.45; Plasser & Theurer: 6.5; RAIL. ONE GmbH: 6.31, 6.32, 6.33, 6.34; RENFE - ADIF: 6.1, 6.11, 6.12, 6.18, 6.19, 6.20, 6.21, 6.22, 6.50, 7.1, 7.3, 8.22, 8.43, 10.25, 11.7.6; Salemme A. The status of High Speed / High Capacity projects in Italy // Презентация доклада на Всемирном конгрессе по ВСМ. — Амстердам, 2008: 8.14; Siemens AG: 10.30 а,
II. 6,11.9, 11.11, 11.12; SNCF: 3.5, 3.6, 3.8, 3.9, 3.10, 3.20, 6.2а, 6.4, 6.15, 6.16, 6.23, 8.16, 8.31, 8.32, 8.33, 10.296, 10.31, 10.45, 10.47, 10.48; Sonneville AG: 6.48, 6.49; Tanaka A. Coexisting and Mutual Prosperity with the Regions on the Sanyo Shinkansen Line // Презентация доклада на Всемирном конгрессе по ВСМ. - Амстердам, 2008: 8.34, 8.35; www.aernav.free.fr/Galerie/I80_HV_l.html: 2.9; www.freelibs. com/news/ 12162: 8.28; www.forum.amadeus-project.com/lofiversion/index.php/ t2614.html; http:// pandadao.livejournal.com/56270.html: 2.3; www.impactlab.net/wp-content/uploads/2010/10/skyway. jpg Skyway: 2.66; www.islamnews.ru/news-136482.html: 8.30a; www.irnpactlab.net/2010/10/30/ futuristic-monorails-from-the-past: 2.2; www.kaluga.barahla.net/goods/91/5235503.html: 6.2a; www. masterovoi.ru/pjerspjektivnyje-matjerialy-gjeotjekstil-gjeorjeshjetka-gjeosjetka: 6.26; www.profi-forex. org/auto/entryl008127725.htm: 3.1; www.ptatransitauthority.blogspot.ru/2009/10/alweg-monorail. html. Монорельсовые дороги: 2.6a; www.transrapid.de/cgi-tdb/en/basics.prg?a_no=19: 2.10; www. wikimapia.org/24582427/ru/ Готардский-базисный-тоннель: 8.26; www.wikimapia.org/25136859/ ru/ Тоннель-Мармарай: 8.306; www.wikimedia.org/wiki/File:Rail_gauge_world. png?uselang=ru: 7.2; www.wikipedia.org/wiki/Channel_Tunnel: 8.37, 8.38; www.wikipedia.org/wiki/File:GBT_MFS_Faido_ TV-WS.jpg.File:GBT MFS Faido TV-WS.jpg: 8.27; www.wikipedia.org/wiki/%D0%A4%D0%B0%D0%B9 %DO%BB:NEAT_Gotthardachse.png: 8.20; www.wikipedia.org/wiki/File:GSM-R-Station.jpg: 11.19; www. wikipedia.org/wiki/File:GSM-R-Station.jpg: 11.20; www.wikipedia.org/wiki/File-.JRE-TEC-E5_omiya. JPG: 1.24; www.wikipedia.org/wiki/File:JR-Maglev-MLX01-901_001.jpg: 2.13; www.wikipedia.org/wiki/ File:Netherlands_HSL_Southl.jpg. File:Netherlands HSL Southl.jpg: 8.21; Yokoyama A. Infrastructure for high speed lines in Japan // International Practicum on Implementing High Speed Rail in United States. — UIC, APTA, 6. m., 6. r.: 6.6.6,6.24,6.25; ZabeeJ.C. High Speed Rail in Practice-Recent Achievements in Europe // Презентация доклада на Всемирном конгрессе по ВСМ. — Амстердам, 2008: 1.21; 8.18, 8.29.
Авторы



 Людмила Сергеевна Блажко — инженер путей сообщения (Ленинградский институт инженеров железнодорожного транспорта — ЛИИЖ'Г), кандидат технических наук (1986 г.), доктор технических наук (2004 г.); специалист в области взаимодействия пути и подвижного состава, строительства железных дорог, верхнего строения пути, технических устройств высокоскоростного железнодорожного транспорта; участник разработки проектов, связанных с высокоскоростным железнодорожным транспортом и рельсовыми транспортными системами с высокими и сверхвысокими осевыми нагрузками; профессор, заведующая кафедрой «Железнодорожный путь» Петербургского государственного университета путей сообщения, проректор по учебной работе (ПГУПС); автор десятков научных трудов, учебников и учебных пособий.
Людмила Сергеевна Блажко — инженер путей сообщения (Ленинградский институт инженеров железнодорожного транспорта — ЛИИЖ'Г), кандидат технических наук (1986 г.), доктор технических наук (2004 г.); специалист в области взаимодействия пути и подвижного состава, строительства железных дорог, верхнего строения пути, технических устройств высокоскоростного железнодорожного транспорта; участник разработки проектов, связанных с высокоскоростным железнодорожным транспортом и рельсовыми транспортными системами с высокими и сверхвысокими осевыми нагрузками; профессор, заведующая кафедрой «Железнодорожный путь» Петербургского государственного университета путей сообщения, проректор по учебной работе (ПГУПС); автор десятков научных трудов, учебников и учебных пособий.
Анатолий Трофимович Бурков — инженер путей сообщения (Томский электромеханический институт инженеров железнодорожного транспорта, 1958 г.); кандидат технических наук (1964 г.), доктор технических наук (1982 г.); специалист в области электрификации железных дорог, электрического тягового привода, силовых электрических преобразовательных систем, высокоскоростного железнодорожного транспорта; участник разработки проектов электрификации железных дорог, создания нового тягового электрического подвижного состава, в том числе — для ВСМ; профессор кафедры «Электроснабжение железных дорог» ПГУПС; заведующей этой кафедрой (1977—2010 гг.); автор десятков научных трудов, учебников и учебных пособий.
Николай Сергеевич Бушуев — инженер путей сообщения (ЛИИЖТ, 1976 г.), кандидат технических наук (1984 г.); специалист в области изысканий и проектирования железных дорог, высокоскоростных магистралей; участник разработки проектов новых железных дорог и ВСМ; профессор кафедры «Изыскания и проектирование железных дорог» ПГУПС; автор десятков научных трудов, учебников и пособий.
Валентин Александрович Гапанович — инженер путей сообщения (Новосибирский институт инженеров железнодорожного транспорта, 1992 г.), выпускник Академии народного хозяйства при Правительстве РФ (1998 г), кандидат технических наук (2012 г.); специалист в области управления процессами перевозок на железнодорожном транспорте, высокоскоростного железнодорожного транспорта; главный инженер Октябрьской железной дороги (2000-2003 гг.), вице-президент, старший вице-президент ОАО «РЖД»; руководитель и участник ряда крупных проектов, связанных с модернизацией железных дорог страны, организацией высокоскоростного железнодорожного движения в РФ; автор десятков научных трудов, учебников и пособий.
Игорь Павлович Киселев — инженер путей сообщения (ЛИИЖТ, 1971 г.), кандидат философских наук (1997 г.), доктор исторических наук (2012 г.); специалист в области СЦБ и связи, высокоскоростных транспортных систем, истории транспорта; директор по международным связям Российского открытого акционерного общества «Высокоскоростные магистрали» — РОАО «ВСМ» (1991—2006 гг.); участник разработки проектов, связанных с высокоскоростным железнодорожным транспортом в России; профессор кафедры управления и технологии строительства ПГУПС и профессор кафедры истории ПГУПС; автор десятков научных трудов, учебников и пособий.
Валерий Иванович Ковалев — инженер путей сообщения (ЛИИЖТ, 1981 г.), кандидат технических наук (1998 г.), доктор технических наук (2004 г.); профессор; специалист в области управления процессами перевозок на железнодорожном транспорте, высокоскоростного железнодорожного транспорта; заместитель начальника Октябрьской железной дороги (1994—1995 г.], начальник Приволжской железной дороги (1995—1997 г); заместитель, первый заместитель министра путей сообщения РФ (1997—1999 г.); ректор ПГУПС (1999—2013 г.); организатор и участник разработки ряда крупных железнодорожных проектов; автор десятков научных трудов, учебников и пособий.
Александр Петрович Ледяев — инженер-строитель (ЛИИЖТ, 1967 г.), кандидат технических наук (1978 г.), доктор технических наук (1996 г.), специалист в области строительства тоннелей и метрополитенов; профессор, заведующий кафедрой тоннелей и метрополитенов, первый проректор ПГУПС; Заслуженный работник высшей школы Российской Федерации; участник разработки крупных транспортных проектов по освоению подземного пространства; автор десятков научных трудов, учебников и пособий.
Александр Борисович Никитин — инженер путей сообщения—электрик (ЛИИЖТ, 1984 г.), кандидат технических наук (1989 г.), доктор технических наук (2005 г.); специалист в области компьютерных систем оперативного управления движения поездов, автор ряда разработок микропроцессорных систем железнодорожной автоматики и телемеханики, в том числе и для высокоскоростного железнодорожного транспорта; профессор кафедры автоматики и телемеханики на железных дорогах и руководитель Центра компьютерных железнодорожных технологий ПГУПС; автор десятков научных трудов, учебников и пособий.




 Павел Андреевич Плеханов — инженер путей сообщения (ПГУПС, 2007 г.}, кандидат технических наук (2013 г.); специалист в области железнодорожной электросвязи, организации систем управления и безопасности на обычном и высокоскоростном железнодорожном транспорте; доцент кафедры радиотехники ПГУПС; автор научных работ и учебных пособий.
Павел Андреевич Плеханов — инженер путей сообщения (ПГУПС, 2007 г.}, кандидат технических наук (2013 г.); специалист в области железнодорожной электросвязи, организации систем управления и безопасности на обычном и высокоскоростном железнодорожном транспорте; доцент кафедры радиотехники ПГУПС; автор научных работ и учебных пособий.




 Валерий Михайлович Саввов — инженер путей сообщения (ЛИИЖТ, 1967 г.), кандидат технических наук (2002 г.); специалист н области электроснабжения железных дорог, высокоскоростного подвижного состава и высокоскоростного железнодорожного транспорта; главный инженер Октябрьской железной дороги (1988—1992 гг.), первый заместитель генерального директора РОАО «Высокоскоростные магистрали» (1992—2011 гг.); профессор кафедры электроснабжения железных дорог ПГУПС (с 2005 г.); участник разработки проектов ВСМ в РФ и нового электроподвижного состава; лауреат премии Правительства РФ в области науки и техники, автор десятков научных трудов, учебников и пособий.
Валерий Михайлович Саввов — инженер путей сообщения (ЛИИЖТ, 1967 г.), кандидат технических наук (2002 г.); специалист н области электроснабжения железных дорог, высокоскоростного подвижного состава и высокоскоростного железнодорожного транспорта; главный инженер Октябрьской железной дороги (1988—1992 гг.), первый заместитель генерального директора РОАО «Высокоскоростные магистрали» (1992—2011 гг.); профессор кафедры электроснабжения железных дорог ПГУПС (с 2005 г.); участник разработки проектов ВСМ в РФ и нового электроподвижного состава; лауреат премии Правительства РФ в области науки и техники, автор десятков научных трудов, учебников и пособий.
Владимир Николаевич Смирнов — инженер-строитель (ЛИИЖТ, 1963 г.), кандидат технических наук (1983 г.), доктор технических наук (1998 г.); специалист в области проектирования, управления строительством мостов и работы мостовых сооружений в условиях высокоскоростного железнодорожного движения; профессор и заведующий кафедрой мостов ПГУПС; участник разработки проектов, связанных с высокоскоростным железнодорожным движением; автор десятков научных трудов, учебников и пособий.
Юрий Игоревич Соколов — инженер-экономист (Московский государственный университет путей сообщения (МНИТ), 1998 г.), кандидат экономических наук (2000 г.), доктор экономических наук (2008 г.); специалист в области экономики железнодорожного транспорта, управления качеством и маркетинга на транспорте; профессор кафедры экономики и управления на транспорте МИИТ; руководитель и участник ряда проектов, связанных с научным сопровождением программ развития железнодорожного транспорта, автор десятков научных трудов, учебников и пособий.
Виталий Семенович Суходоев — инхсенер путей сообщения (ЛИИЖТ, 1958 г.), кандидат технических наук (1968 г.); специалист в области проектирования железных дорог, железнодорожных узлов и станций, высокоскоростного железнодорожного транспорта; профессор кафедры железнодорожных станций и узлов ПГУПС; участник разработки проектов новых железнодорожных станций, ВСМ в России; автор десятков научных трудов, учебников и пособий

 Тамила Семеновна Титова — инженер-электромеханик (Северо-западный заочный политехнический институт), кандидат технических наук (1993 г.), доктор технических наук (2005 г.); специалист в области систем электроснабжения, техносферной и экологической безопасности; профессор и заведующая кафедрой техносферной и экологической безопасности, проректор по научной работе ПГУПС; автор десятков научных трудов, учебников и пособий.
Тамила Семеновна Титова — инженер-электромеханик (Северо-западный заочный политехнический институт), кандидат технических наук (1993 г.), доктор технических наук (2005 г.); специалист в области систем электроснабжения, техносферной и экологической безопасности; профессор и заведующая кафедрой техносферной и экологической безопасности, проректор по научной работе ПГУПС; автор десятков научных трудов, учебников и пособий.
Юрий Степанович Фролов — инженер-строитель (Новосибирский институт инженеров железнодорожного транспорта, 1961 г.), кандидат технических наук (1972 г.), доктор технических наук (1995 г.); специалист в области сооружения тоннелей и метрополитенов; профессор кафедры тоннелей и метрополитенов ПГУПС; участник разработки транспортных проектов по освоению подземного пространства; автор десятков научных трудов, учебников и пособий.
Оглавление
Введение....................................................................................... ...................................................................................................... 3
Глава 1. ВЫСОКОСКОРОСТНОЙ ЖЕЛЕЗНОДОРОЖНЫЙ ТРАНСПОРТ
И ЕГО МЕСТО В СОВРЕМЕННЫХ ТРАНСПОРТНЫХ СИСТЕМАХ........................................................................................ 7
1.1. Предыстория высокоскоростного железнодорожного транспорта................................................................... 7
1.2. Классификация железных дорог и максимальная скорость движения поездов....................................... 17
1.3. Зарождение и развитие современного высокоскоростного
железнодорожного транспорта.............................................................................................................................................. 20
1.4. Основные этапы становления и перспективы развития скоростного
и высокоскоростного железнодорожного транспорта в России................................................................................ 26
Глава 2. МОНОРЕЛЬСОВЫЙ СКОРОСТНОЙ И ВЫСОКОСКОРОСТНОЙ ТРАНСПОРТ................................................. 34
2.1. Первоначальный этап развития монорельсовых транспортных систем
в XIX — начале XX столетия........................................................................................................................................................ 34
2.2. Развитие конструкций монорельсовых транспортных систем
во второй половине XX столетия............................................................................................................................................. 37
2.3. Монорельсовые транспортные системы с экипажами на магнитном подвешивании............................. 40
Глава 3. ЭКОЛОГИЧЕСКИЕ АСПЕКТЫ СООРУЖЕНИЯ И ЭКСПЛУАТАЦИИ
ВЫСОКОСКОРОСТНЫХ ЖЕЛЕЗНЫХ ДОРОГ.......................................................................................................................... 46
3.1. Исторический очерк экологии транспортных систем........................................................................................ 46
3.2. Сравнение экологии транспортных систем.............................................................................................................. 47
3.3. Снижение шума — основная задача улучшения экологических
характеристик высокоскоростных железных дорог....................................................................................................... 56
Глава 4. СОЦИАЛЬНО-ЭКОНОМИЧЕСКИЕ ПРЕДПОСЫЛКИ И РЕЗУЛЬТАТЫ
СООРУЖЕНИЯ ВЫСОКОСКОРОСТНЫХ ЖЕЛЕЗНЫХ ДОРОГ.......................................................................................... 66
4.1. Основные социально-экономические факторы, определяющие спрос
на высокоскоростные пассажирские перевозки.............................................................................................................. 66
4.2. Взаимодействие и конкуренция отдельных видов транспорта в условиях открытого рынка транспортных услуг. Место высокоскоростных железных дорог
на рынке пассажирских перевозок.......................................................................................................................................... 69
4.3. Источники финансирования и механизмы реализации проектов ВСМ......................................................... 79
4.4. Социально-экономическая эффективность сооружения
высокоскоростных железных дорог....................................................................................................................................... 84
Глава 5. ОСНОВЫ ПРОЕКТИРОВАНИЯ ВЫСОКОСКОРОСТНЫХ ЖЕЛЕЗНЫХ ДОРОГ............................................... 90
5.1. Основные концептуальные подходы к созданию высокоскоростных
железнодорожных магистралей............................................................................................................................................... 90
5.2. Общие требования к инфраструктуре высокоскоростных железнодорожных линий............................. 92
5.3. Общие принципы разработки и состав проектов железных дорог.................................................................. 94
5.4. Нормативная документация........................................................................................................................................ 95
5.5. Особые требования к проектам ВСМ......................................................................................................................... 97
5.6. Основные технические параметры и решения ВСМ.............................................................................................. 97
5.7. Выбор принципиального направления и положения трассы ВСМ................................................................... 99
5.8. Основные элементы плана линии и условия их проектирования................................................................ 102
5.9. Элементы продольного профиля и требования к их проектированию....................................................... 108
5.10. Трассирование ВСМ....................................................................................................................................................... 113
5.11. Основные критерии оценки трассы ВСМ.............................................................................................................. 114
Глава 6. ЖЕЛЕЗНОДОРОЖНЫЙ ПУТЬ ДЛЯ ВЫСОКОСКОРОСТНОГО ДВИЖЕНИЯ,
ОСНОВНЫЕ ТРЕБОВАНИЯ И ТЕХНИЧЕСКИЕ РЕШЕНИЯ................................................................................................ 116
6.1. Основные требования к земляному полотну вновь сооружаемых ВСМ...................................................... 116
6.2. Рельсы и рельсовые скрепления ВСМ....................................................................................................................... 118
6.3. Конструкции верхнего строения пути на балласте на ВСМ.............................................................................. 122
6.4. Безбалластные конструкции железнодорожного пути ВСМ........................................................................... 131
6.5. Стрелочные переводы, применяемые за рубежом для скоростного
и высокоскоростного движения........................................................................................................................................ 148
6.6. Стрелочные переводы, используемые для высокоскоростного
железнодорожного движения в России............................................................................................................................ 155
Глава 7. ПРОБЛЕМЫ СОВМЕСТИМОСТИ ЭКСПЛУАТАЦИИ ВСМ
С РАЗЛИЧНОЙ ШИРИНОЙ КОЛЕИ....................................................................................................................................... 159
7.1. Краткий исторический очерк происхождения разных стандартов ширины
колеи железных дорог и влияние ширины колеи на скорость движения............................................................ 159
7.2. Выбор ширины колеи для ВСМ и совместная эксплуатация магистралей
с различной шириной колеи................................................................................................................................................. 162
Глава 8. ИСКУССТВЕННЫЕ СООРУЖЕНИЯ НА ВЫСОКОСКОРОСТНЫХ
ЖЕЛЕЗНОДОРОЖНЫХ МАГИСТРАЛЯХ.............................................................................................................................. 164
8.1. Особенности устройства искусственных сооружений
на высокоскоростных железнодорожных магистралях.............................................................................................. 164
8.2. Основные требования к проектированию мостов
на высокоскоростных магистралях................................................................................................................................... 169
8.3. Конструкции мостов на высокоскоростных магистралях............................................................................... 170
8.4. Общие сведения о тоннелях...................................................................................................................................... 179
8.5. Особенности тоннелей на высокоскоростных линиях.................................................................................... 193
Глава 9. РАЗДЕЛЬНЫЕ ПУНКТЫ НА ВЫСОКОСКОРОСТНЫХ МАГИСТРАЛЯХ......................................................... 201
9.1. Размещение и путевые схемы раздельных пунктов на ВСМ............................................................................ 201
9.2. Классификация и схемы раздельных пунктов ВСМ............................................................................................ 206
9.3. Раздельные пункты в местах разветвления и соединения высокоскоростных линий......................... 209
Глава 10. СИСТЕМЫ ЭЛЕКТРИФИКАЦИИ И УСТРОЙСТВА ЭЛЕКТРОСНАБЖЕНИЯ
ВЫСОКОСКОРОСТНЫХ ЖЕЛЕЗНЫХ ДОРОГ....................................................................................................................... 210
10.1. Системы электрической тяги и устройства электроснабжения.................................................................. 210
10.2. Режимы движения и особенности тяговых расчетов при определении
нагрузок на устройства электроснабжения высокоскоростных линий................................................................ 214
10.3. Требования к устройствам электроснабжения высокоскоростных линий............................................ 218
10.4. Способы усиления системы тягового электроснабжения............................................................................. 218
10.5. Критерии выбора параметров сети тягового электроснабжения............................................................... 224
10.6. Динамика высокоскоростной контактной сети............................................................................................... 226
10.7. Питание тяговых подстанций и секционирование электротяговой сети............................................... 232
10.8. Тяговые подстанции и линейные устройства.................................................................................................. 239
10.9. Контактная сеть........................................................................................................................................................... 243
10.10. Обеспечение надежного токосъема при высокоскоростном движении................................................. 253
10.11. Строительно-монтажные работы при электрификации ВСМ.................................................................... 260
Глава И. АВТОМАТИКА, ТЕЛЕМЕХАНИКА И СВЯЗЬ НА ВСМ........................................................................................ 266
11.1. Системы автоматики, телемеханики и связи на ВСМ, общие требования............................................... 266
11.2. Особенности приборного и аппаратного обеспечения устройств СЦБ..................................................... 269
11.3. Средства регулирования движения поездов на перегонах............................................................................. 278
11.4. Станционные устройства автоматики и телемеханики.
Диспетчерская централизация на ВСМ............................................................................................................................... 283
11.5. Европейская единая система управления движением поездов.................................................................... 284
11.6. Организация связи на ВСМ........................................................................................................................................ 290
Библиография............................................................................................................................................................................. 297
Источники иллюстраций ..................................................................................................................................................... 301
1 = 1 П + {С + ^ПР’
[I] «Стратегии развития железнодорожного транспорта в Российской Федерации до 2030 года». — М., 2007. — 70 с. прил. / Утверждена распоряжением Правительства Российской Федерации от 17 июня 2008 г. № 877-р // http:// www.garant.ru. Текст распоряжения официально опубликован не был; Указ Президента Российской Федерации от 16 марта 2010 г. № 321 «О мерах по организации движения высокоскоростного железнодорожного транспорта в Российской Федерации» // Российская газета. 2010.19 марта.
[II] Дорога предназначалась, прежде всего, для перевозки грузов, хотя на ней выполнялись и пассажирские перевозки, в основном конной тягой.
[III] По другим данным — 29 миль/ч (46,6 км/ч).
[IV] В обозначении типа паровоза (осевой формулы) приведенные числа соотвествуют числу осей: передних бегунковых; ведущих (движущих или сцепных); задних поддерживающих (как правило, расположенных под будкой машиниста). Например, тип паровоза 2-1- 0 означает, что машина имеет имеет две бегунковые, одну ведущую и не имеет поддерживающих осей.
[V] Вышедшее сегодня из употребления название, применявшееся еще в начале XX в.
[VI] Так в США называют города Сент-Пол и Миннеаполис, расположенные на разных берегах Миссисипи.
[VII] В ряде публикаций приводятся сведения о более высокой скорости, достигнутой этим паровозом, здесь публикуются данные наиболее авторитетного историка техники В.А. Ракова.
[VIII] Квази... — начальная часть сложных слов, вносящая значения: мнимый, ненастоящий, похожий.
[9] В ряде исследований говорится «о первом опьянении человечества скоростью». В рекордных поездках превышена скорость 100 миль в час, интерес к гоночным паровозам ослаб.
[10] С большим снижением скорости движения в период мировой войны и первого послевоенного десятилетия.
[11] Определение «Поезд пассажирский скоростной — пассажирский поезд, который по участку (отдельным участкам) следования осуществляет движение со скоростью от 141 до 200 км/ч включительно», которое содержалось в ПТЭ 2010 г. было в 2012 г. заменено следующим: «Поезд пассажирский скоростной — пассажирский поезд, маршрутная скорость движения которого составляет более 91 км/ч».
[12] Поезд пассажирский высокоскоростной — пассажирский поезд, который по участку (отдельным участкам) следования осуществляет движение со скоростью более 200 км/ч.
1 Специалистами обсуждается вопрос принятия еще более высокой градации скорости железнодорожного движения: «ультраскоростное» — диапазон 400— 500 км/ч.
[13] Пропуск по ВСМ скоростных грузовых поездов в виде почтовых поездов был реализован только на ВСМ «Юго-Восток» во Франции.
[XIV] Данные на 1 апреля 2013 г. // www.uic.org. Имеются различия в определении статуса одних и тех же магистралей, в силу чего в разных источниках данные несколько отличаются.
[XV] Исходя из сложившейся к тому времени международной кооперации социалистических стран пассажирские электровозы для СССР поставляли предприятия Чехословакии.
[XVI] Используется также словосочетание «магнитный подвес».
[XVII] Георг IV (1762—1830) — король Соединенного королевства Великобритании и Ирландии, король Ганновера с 1810 по 1830 г.
[XVIII] В п. 3.2. и 3.3 использованы материалы совместных публикаций авторов с А.Ф. Алимовым, Г.К. Зальцманом, С.В. Зубаревым, Г.К. Ивахнюком, А.П. Прониным и А.И. Чистобаевым.
[XIX] 23 июля 2011 г. в КНР вблизи города Вэньчжоу произошло столкновение (нагон одного высокоскоростного поезда другим), в результате чего погибли 33 и были ранены более 190 чел.
[20] В параграфе использованы материалы совместных публикаций авторов с С.А. Хрущевым и А.И. Чистоба- евым.
[21] Этим термином обозначают зону социально-экономической деятельности, тяготеющую к данному транспортному коридору.
[22] Осуществлен лишь проект реконструкции существующей железной дороги в северо-восточном коридоре в пределах мегалополиса Бостон (Бостон — Нью- Йорк — Вашингтон), в котором поезда Acela достигают максимальной скорости 240 км/ч.
[23] Ненецкому, Ханты-Мансийскому, Ямало-Ненецкому и Чукотскому АО.
[24] К этим факторам относятся «аэрофобия» — боязнь полетов, а также «транспортофобия» — боязнь передвижения на любых транспортных средствах. Для таких пассажиров полет в принципе связан с большим дискомфортом, вплоть до нервно-психологических расстройств.
[25] Иногда объявление максимальной скорости может даже стать фактором, отпугивающим пассажиров.
[26] Понятие «зона равной доступности» — некая ограниченная территория, одинаково доступная для горожан, вычисляемая исходя из конфигурации городской территории и плотности расселения людей. Здесь, для упрощения, приняты за конечные точки центр (или исторический центр) каждого из двух населенных пунктов, между которыми совершается поездка, считая, что центральная часть города является точкой (зоной) равной доступности, одинаково удобной для усредненного горожанина.
[27] Относится и к конкурентоспособности транспортных систем на магнитном подвешивании.
[XXVIII] От лат. multiplicatio — умножение.
[29] Европейский союз (Евросоюз, ЕС) — экономическое и политическое объединение 28 европейских государств, юридически закреплен Маастрихтским договором в 1992 г. Главной целью объединения является региональная интеграция — построение «как можно более тесного союза европейских народов» (ст. 1 Договора о Европейском Союзе).
[30] Нормализация — установление нормы, образца, то же, что стандартизация в пределах какой-либо отрасли производства.
[31] Технические условия эксплуатационной совместимости, утвержденные ЕС директивой 96/48.
[32] CEN (от фр. — Comite Europeen de Normalisation) — Европейский комитет по стандартизации; CENELEC (от фр. — Comite Europeen de Normalisation Electrotechnique) — Европейский комитет электротехнической стандартизации; ETS1 (от англ. — The European Telecommunications Standards Institute) — Европейский институт телекоммуникационных стандартов.
[33] Может быть необходимо при получении банковских кредитов, решении вопроса о страховании объектов и т.п.
[34] Напряжения в рельсовой плети под действием температурных сил, возникающих при изменении температуры рельсов по сравнению с той, при которой производилось их закрепление на постоянный режим эксплуатации.
[35] Алюминотермия — химическая реакция восстановления окислов металлов алюминием, открыта русским химиком Н.Н. Бекетовым (1859). В результате реакции в короткий промежуток времени выделяется большое количество тепла (С до 3000 °C) и образуется расплавленный металл.
[36] Разработано британской компанией Pandrol UK Limited.
[37] Разработано германской компанией Vossloh AG.
[XXXVIII] Наименование конструкции дано по названию станции Реда на железнодорожной линии Билефельд — Хамм в Германии, где она была впервые испытана в 1972 г. Цифра 2000 — год, когда современная конструкция этого пути была впервые введена в коммерческую эксплуатацию на ВСМ Эрфурт— Галле, ФРГ.
[XXXIX] Конструкцию предложил в конце 80-х годов прошлого века немецкий инженер Макс Бёгл (Bogl). В настоящее время конструкции этого пути производятся компанией Макс Бёгл (ФРГ).
[XL] Конструкцию разработали совместно Австрийские железные дороги (нем. Osterreichischen Bundesbahnen, аббревиатура ОВВ) и австрийская компания Allgemeine Baugesellschaft — А. Porr AG (сокращенно: Рогг).
[XLI] LVT от англ. Low Vibration Track — путь с низкой вибрацией.
[XLII] От 1 фута и г/4 дюйма (311 мм) до 7 футов и */4 Дюйма (2140 мм). Общая протяженность дорог с колеей 4'81/?" (1435 мм) составляла 3228 км; 5'3" (1600 мм) — 55 км; 5'6" (1676 мм) — 55 км; 6'2" (1880 мм) — 43 км; 7'1/4 (2140 мм) — 469 км. Имелось множество промышленных и шахтных железных дорог с колеей менее 4'81/2".
[XLIII] Самая широкая колея — 2440 мм, использовавшаяся когда-либо на промышленных железных дорогах, была устроена на лесовозной дороге в Орегоне, США, 80-е годы XIX столетия.
[XLIV] Колея стала самой распространенной в мире, кроме названий «стандартная», «нормальная» получила еще и наименование «стефенсоновская». В мировой железнодорожной литературе колею 1435 мм принято называть «стандартной» или «нормальной», более широкую — «широкой», более узкие — «узкой». В России «стандартной» называли колею 1524, теперь 1520 мм, а «стефенсоновскую» — именуют «узкой». Более широкую колею, чем в России имеют несколько стран: Ирландия — 1600 мм, Испания — ныне — 1668 мм (до недавнего времени — 1676 мм), Португалия — 1676 мм (Иберийская колея), Финляндия — 1524 мм. Распространены в мире и более узкие колеи: 1067 мм — Япония, многие страны Африки. Австралия имеет три стандарта: 1067, 1435 и 1600 мм. В мире широко используется также колея шириной 1000 мм.
[XLV] Так называемых «S-образных» кривых, напоминаю щих в плане повернутую латинскую букву S.
[XLVI] Нем.: Bauverfahren von Kopf — система строительства перед головой.
[47] В русскоязычной географической, справочной литературе. в официальных изданиях карт и атласов утвердилось название «Готардский».
[48] Базисный тоннель — тоннель, порталы (входы) которого находятся у самого подножия хребта.
[49] Польдер (от нидерл. — polder) — осушенный и возделанный низменный участок побережья.
[L] Син-Каммон — Новый Каммон (япон.). Первый однопутный железнодорожный тоннель между островами Хонсю и Кюсю под проливом Симоносеки был проложен в начале 40-х годов XX в. и имел длину 3,6 км. Двухпутный тоннель Син-Каммон, значительно более протяженный, сооружался в 50-е гг. и был пройден по более благоприятной с точки зрения геологии трассе севернее существовавшего тоннеля.
[LI] Магтагау (от турецкого Marmara — Мраморное море и гау — рельс).
[LII] В XIX—XX вв. скорость поездов в тоннелях не превышала 70—80 км/ч.
[LIII] В процессе строительства тоннеля проходка опережающей штольни велась раньше основных тоннелей большого диаметра, что, помимо решения необходимых транспортно-технологических вопросов, позволяет также уточнять геологическую ситуацию впереди по трассе тоннеля.
[LIV] Здесь и далее к сверхпологим отнесены переводы, обеспечивающие скорость на ответвление 160 км/ч и более.
[LV] t* — временной фиксированный интервал, используемый при обработке графика нагрузки /(f), который перемещается на оси времени t (см. критерии расчета параметров сети тягового электроснабжения // Скоростной и высокоскоростной железнодорожный транспорт. T2. / Под ред. В.И. Ковалева. — СПб.: Информационный центр «Выбор», 2003. — С. 176).
[LVI] Балиса — от франц, balise (бакен, буй; сигнальная мачта; радиомаяк). Для отличия от железнодорожных терминов в современной технической литературе, посвященной авиации, судовождению для обозначения подобного устройства используется англ, слово beacon.
[LVII] В последние годы по западноевропейским странам прокатилась волна вандализма и хищений кабелей различного назначения на железных дорогах.
[58] По данным The Institute of Electrical and Electronics Engineers, Inc. — Института инженеров по электротехнике и электронике (США).
[59] Bluetooth от англ. — Синий зуб (в честь короля Харальда 1).
[60] От англ. — беспроводная «верность» воспроизведения (Wireless Fidelity).
Дата добавления: 2019-11-16; просмотров: 1427; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!