ДИАГНОСТИЧЕСКИЕ СИГНАЛЫ БОРТОВЫХ СИСТЕМ
Главное при диагностировании – это контролепригодность самого объекта диагностирования. Измерение при сегодняшнем уровне развития микропроцессорных систем не вызывает затруднений – главное иметь диагностический сигналы. Получение исходной диагностической информации происходит с помощью датчиков – устройств, преобразующих контролируемую физическую величину в электрический сигнал: все измерительные системы могут померить один из следующих параметров электрического сигнала, в который и надо преобразовать контролируемый показатель:
- напряжение;
- частота импульсного электрического сигнала;
- периодичность поступления электрического сигнала;
- число импульсов электрического сигнала;
- длительность электрического сигнала;
- наличие электрического сигнала (есть или нет).
Установка датчиков в цепях локомотива – достаточно дорогой и не всегда возможный процесс. Например, практически невозможно поставить датчик температуры в якорную обмотку тяговых двигателей. На Рис.5.30 показаны примеры датчкиов.
Ток тяговых двигателей
Локомотив – это тяговое средство железнодорожного транспорта. Тяга поездов – основное назначение локомотивов. Тяговое усилие в локомотивах возникает за счет сцепления колесных пар (движателей) с рельсом. Тяговый момент на оси колесной пары возникает в результате преобразования электрической энергии (подводится из контактной сети у электровозов и с дизель-генераторной установки у тепловозов) в механическую согласно законам электротехники; Ампера, электромагнитной индукции, Кирхгофа и др. Преобразование осуществляет тяговый электродвигатель (ТЭД), который с помощью механической передачи соединяется с колесной парой. Совокупность этих трех систем называется «колесно-моторный блок». КМБ – основа любого локомотива (Рис.5.31). Мощность локомотива, его тяговые характеристики определяются колесно-моторным блоком и их числом. Обычно число КМБ равно числу осей. Именно от устойчивой работы КМБ зависит устойчивость работы локомотива в целом. Диагностика КМБ – задача номер один.
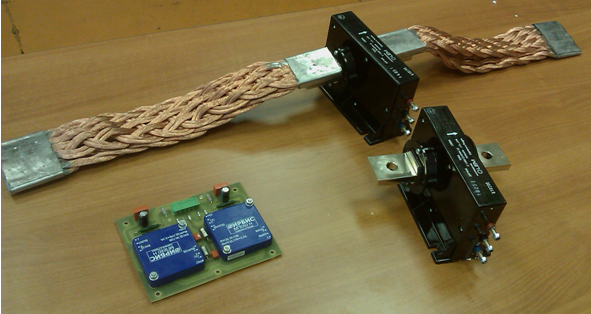
а - Датчик силового тока (основной в системе диагностирования)
(в т.ч. в сборе с медными «косами» и источниками питания)


б - Датчик угла поворота в – датчик давления
(скорсоти вращения колесной пары)


г – датчик виброускорений д – датчики температуры
Рисунок 5.30 – Датчики локомотива
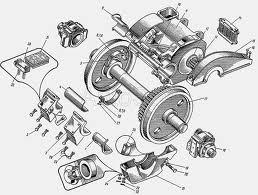
а – Состав КМБ б –КМБ в сборе


в – ТЭД электровоза ЭП2К г – ТЭД в депо
Рисунок 5.31 – КМБ – основной объект диагностирования
Главный параметр КМБ – это электрический ток. Именно ток определяет силу тяги ТЭД, КМБ и локомотива в целом. Можно утверждать, что ток ТЭД – главный диагностический параметр локомотива.
Ток ТЭД представляет собой аналоговый сигнал, меняющийся во времени в диапазоне от 0 до тысяч Ампер. При анализе тока следует контролировать следующие его характеристики:
- абсолютное значение, А;
- превышение времени езды с пятиминутным током;
- превышение времени езды с часовым током;
- наличие скачков тока;
- скорость нарастания тока;
- разброс токов по параллельно работающим КМБ;
- колебание тока; наличие высокочастотных помех;
- срабатывание защит по скорости нарастания тока, по разбросу токов и др.
Примечание: при отсутствии контроля тяговых токов ТЭД систему диагностирования нельзя считать полноценной. Следует отметить, что по параметрам тока ТЭД можно судить о работоспособности большинства систем локомотива.
Наряду с током каждого из тяговых электродвигателей желательно знать общий ток локомотива. Особенно это актуально для тепловозов, где генератор электрического тока находится непосредственно на локомотиве.
Наряду с током ТЭД у КМБ необходимо контролировать:
- скорость вращения колесных пар;
- температуры обмоток якоря и обмоток возбуждения;
- наличие искрения коллектора;
- напряжение на ТЭД;
- вибрация;
- температура подшипников буксового узла;
- наличие боксования и юза.
Параметры ДГУ
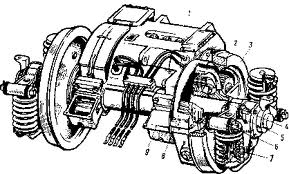
На тепловозах наряду с ТЭД есть еще один агрегат, без диагностирования которого нельзя говорить о диагностировании – это дизель-генераторная установка (Рис.5.32). Общую работоспособность дизеля можно контролировать по его выходным параметрам на каждой позиции управления: ток генератора, напряжение генератора, мощность ДГУ, обороты дизеля, удельный расход топлива. Однако для проверки исправности необходим контроль внутренних параметров дизеля: температура и давление в различных элементах дизеля, температура воды и масла и многое другое. Диагностирование ДГУ – серьезное научно-техническое направление диагностики.
Срабатывание защит
На локомотиве имеется комплекс аппаратов защиты, защищающих локомотив от возникновения опасных ситуаций, прежде всего – пожара. Срабатывание защит, как правило, приводит к срабатыванию главного выключателя (Рис.5.33). Аппараты защиты – одни из самых надежных устройств локомотива. Но их срабатывание является важным диагностическим сигналом: либо были нарушения режимов эксплуатации, либо на локомотиве есть неисправности (скрытые или явные).


а – ДГУ в сборе б – ДГУ на тепловозе


в - тепловоз с неисправным дизелем
Рисунок 5.32 – Дизель-генераторная установка тепловоза

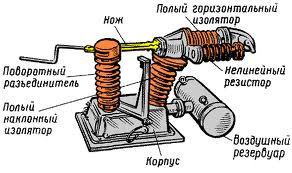
а – ГВ б – Воздушный быстродействующий выключатель
Рисунок 5.33 – Аппараты защиты локомотива
Контроль срабатывания защит, интенсивность срабатываний, увеличение числа срабатываний защит за поездку – важный бинарный (измеряется в числе срабатываний) диагностический сигнал.
Электрически цепи
Для управления тяговыми двигателями на электровозе имеются сложные электрические цепи (пример приведён на рисунке 5.34), особенно на электровозах. Несмотря на то, что косвенно о работе электрических цепей можно судить по току ТЭД, желательно иметь датчики в цепях управления. Чем больше будет сигналов из цепей управления – тем точнее можно диагностировать неисправности.
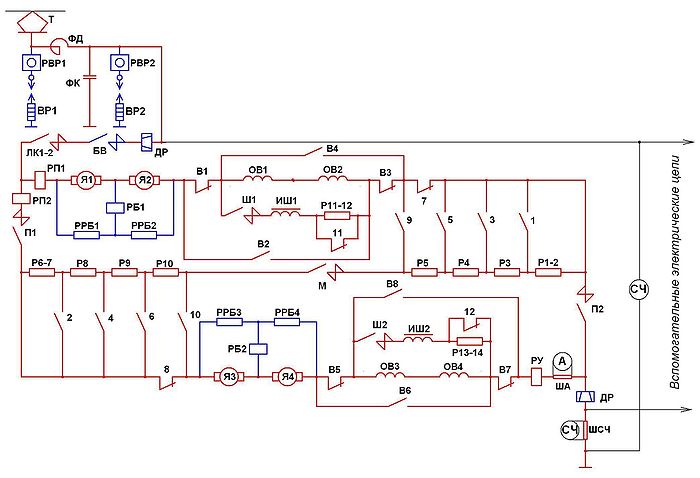
Рисунок 5.34 – Электрические цепи электровоза постоянного тока
Вспомогательные машины
На локомотиве имеются вспомогательные электрические машины, главными из которых являются мотор-компрессоры (Рис.5.35) и вентиляторы. Контроль работы вспомогательных машин также желателен.
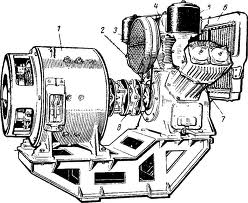
Рисунок 5.35 – Мотокомпрессорная установка локомотива
Автоматические тормоза
Пневматические тормоза являются главной системой, обеспечивающей безопасность движения поезда. Контроль ее работы обязателен. В настоящее время контроль тормозов имеется на всех локомотивах в приборах безопасности. В локомотивных депо имеется группа расшифровки скоростемерных лент (электронных и бумажных), где ведется учет использования тормозов. Поэтому в настоящее задачу контроля работоспособности тормозов можно считать в целом решенной.
Низковольтные цепи
Низковольтные цепи локомотива также могут существенно влиять на надежность локомотива. С появлением МСУТ их число существенно сокращается. Однако в любом случае остается актуальной зада контроля бортового напряжения +50В, от качества которого во многом зависит качество работы системы управления локомотива.
Управляющие сигналы
Второй группой основных диагностических сигналов на локомотиве (наряду с выходными сигналами – током ТЭД) являются управляющие сигналы, поступающие от машиниста. Необходимо знать состояние тумблеров, контроллеров и других органов управления в кабине машиниста. Большинство из этих сигналов являются бинарными: включен / выключен.
АРМ МСУ
В мировой практике широко известны системы управления надежностью локомотивов, использующие бортовую диагностическую информацию. Например, в известной американской фирме General Electric (GE) контроль исправности выпускаемых ими локомотивов в эксплуатации осуществляется с единого центра компетенции. Где бы в мире не эксплуатировался тепловоз производства GE, о возникшей проблеме станет известно специалистам и будут приняты адекватные меры.
Мощная система диагностирования имеется на скоростных поездах, в т.ч. на электропоезде САПСАН производства немецкой фирмы Siemens. Бортовая система диагностирования опрашивает сотни датчиков и фиксирует все отклонения от нормальной работы. Информация передается в депо (для САПСАН - в электродепо «Металлострой»), где заранее готовятся к необходимым профилактическим и ремонтным работам. Ремонт осуществляется по крупно модульному принципу и по своей оперативности в чем-то напоминает пит-стоп гоночных автомобилей формулы 1.
Перспективный отечественный электровоз двойного питания ЭП20 производства Трансмашхолдинга совместно с фирмой Alstom имеет не менее мощную систему диагностирования. И сейчас выпускаемые электровозы серий 2ЭС6 и 2ЭС10 производства «Уральские локомотивы» передают диагностическую информацию в ситуационный центр завода-изготовителя, где не только фиксируют возникающие инциденты, но и могут оказать консультации машинистам по порядку действий в возникшей ситуации. Аналогичный опыт накоплен у отечественных производителей бортовых систем учета топлива.
Описанные в предыдущем разделе МСУ имеют собственные автоматизированные рабочие места (АРМ МСУ), позволяющие производить расшифровку накопленной и переданной в стационарные системы информации для последующего диагностирования. АРМ МСУ после расшифровки данных МСУ представляют информацию в удобном для использования виде. В зависимости от степени обработки и анализа информации можно выделить следующие экранные формы и соответствующие им функции:

а - Осциллограмма АРМ МСУЭ
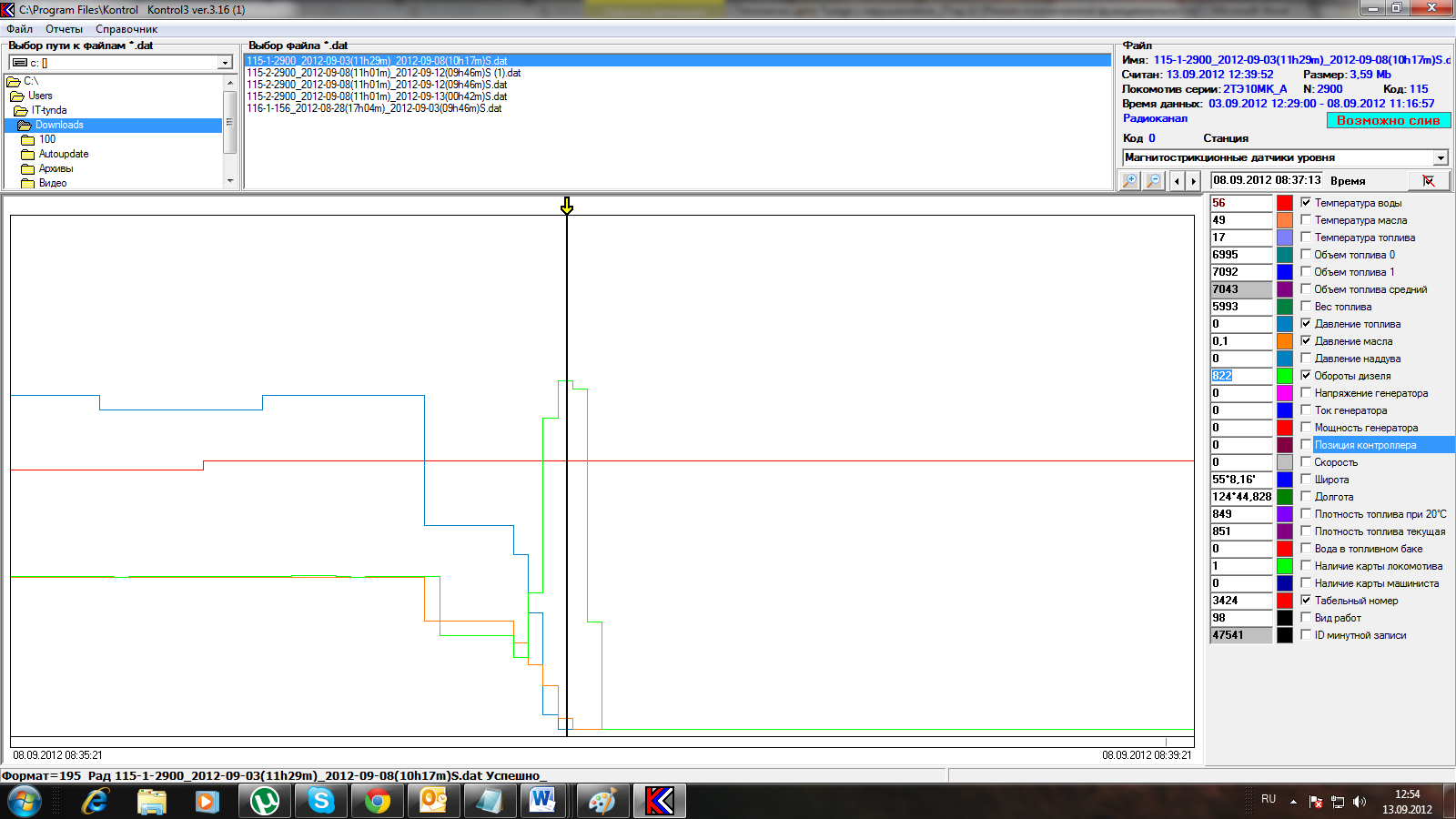
б - Осциллограмма АРМ «Борт»
Рисунок 5.37 – Пример экранных форм типа «Осциллограмма»
- Осциллограммы – графическое представление данных МСУ как функции времени или пройденного пути. Позволяет удобно анализировать физические процессы, происходившие на локомотиве. Пример экранной формы приведен на Рис.5.37. Функция удобна для анализа отдельных случаев, но крайне трудоемка для повседневного анализа информации;
- Отчеты – обработанные данные (как правило табличные) о наличие тех или иных видов нарушений или отказов, обнаруженных в процессе расшифровки данных МСУ. Пример табличных данных приведен в Табл.5.1 Отчеты удобны для постоянного мониторинга, однако ограничены только заложенными в программу алгоритмами.
- СППР – система поддержки принятия решений выдает рекомендации о необходимых действиях. СППР является высшей формой функциональности АРМ МСУ.
Таблица 5.1 – Пример отчета об обнаруженных нарушениях
| № | Тепловоз | Кол-во нарушений режимов эксплуатации | Вид нарушения |
| 1 | 2ТЭ10МК - 2900А | 3 | Температура воды выше нормы при остановке |
| 2 | 3ТЭ10МК - 156В | 1 | Температура воды выше нормы при остановке |
| 4 | 3ТЭ10МК - 1240Б | 2 | Температура воды выше нормы при остановке |
| 9 | 3ТЭ10МК - 1425А | 1 | Температура воды выше нормы при остановке |
| 11 | 3ТЭ10МК - 1430А | 1 | Температура воды выше нормы при остановке |
| 12 | 3ТЭ10МК - 1440А | 1 | Температура воды выше нормы при остановке |
| 13 | 3ТЭ10МК - 1440Б | 2 | Температура воды выше нормы при остановке |
| 14 | 3ТЭ10МК - 2858Б | 3 | Температура воды выше нормы при остановке |
| 15 | ТЭМ2 - 1079 | 7 | Температура воды выше нормы при остановке |
| 16 | ТЭМ2 - 1081 | 2 | Температура воды выше нормы при остановке |
| 17 | ТЭМ2 - 6265 |
Дата добавления: 2019-09-13; просмотров: 969; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!