Моделювання динамічних процесів
Математичне моделювання дозволяє досліджувати перехідні процеси в системі автоматизованого електропривода за допомогою комп’ютера. Метод базується на ідентичності диференціальних рівнянь, якими описується динаміка системи, і математичної моделі, яка досліджується на комп’ютері.
Із багатьох методик розв’язання диференціальних рівнянь за допомогою комп’ютера найменше працемістким і наочним є структурний метод, коли набір задачі на комп’ютері виконують за структурною схемою досліджуваної системи, де кожна ланка представлена своєю передавальною функцією. Зокрема, можуть бути використані спеціалізований пакет MATLAB Simulink або програма SIAM.
При моделюванні досліджуються залежності швидкості w (t) і струму I (t) при стрибкоподібній зміні задаючої напруги і  =0. Потім досліджуються ці ж змінні при обмеженні струму.
=0. Потім досліджуються ці ж змінні при обмеженні струму.
Структурну схему електропривода з сумуючим підсилювачем і зворотним зв’язком за швидкістю при зміні керуючого впливу доцільно представити у вигляді, наведеному на Рис.12.
Оскільки реалізувати ідеальну диференціюючу ланку  при моделюванні неможливо, то її замінюють реальною з передавальною функцією
при моделюванні неможливо, то її замінюють реальною з передавальною функцією
 , де
, де  с –
с –
найменша стала часу в контурі регулювання.
Тоді передаточні функції коректуючи ланок запишуться
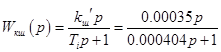 /76/
/76/
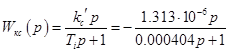 /77/
/77/
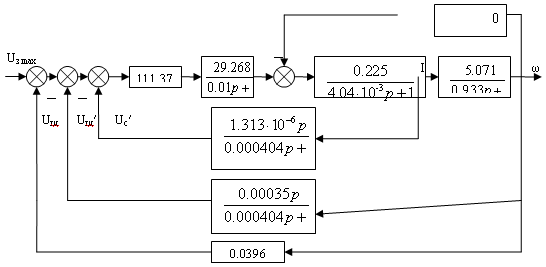
Рис.12. Структурна схема автоматизованого електропривода
При =0 струм двигуна зв’язаний зі швидкістю рівнянням  .
.
|
|
|
На підставі результатів моделювання [графіків w (t) і I (t)] отримали наступні показники якості:
перерегулювання швидкості - відсутнє (σ=0);
час регулювання швидкості tрω=2,7 с;
максимальний струм якірного кола двигуна Imax=16.32 А;
момент останнього перевищення струмом якоря номінального значення t=2.86 c.
Вибір системи керування і опис її роботи
Регулювання напруги на обмотках двигуна можна здійснювати імпульсним методом, коли двигун періодично підключається до джерела живлення і відмикається від нього. При цьому в той період, коли двигун підключений до джерела живлення, відбувається передача енергії від джерела до електропривода, яка в основному передається через вал двигуна приводному механізму, а частина її запасається у вигляді кінетичної і електромагнітної енергії; у період відключення електропривод продовжує працювати за рахунок накопиченої енергії.
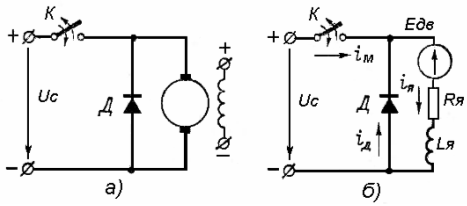
Рис.13. Принципова (а) і еквівалентна (б) схеми системи імпульсний регулятор напруги - двигун постійного струму з незалежним збудженням.
Принципова схема системи імпульсний регулятор напруги - двигун постійного струму з незалежним збудженням зображена на рис.1, а, та еквівалентна її схема на Рис.13, б. У цій системі якір двигуна за допомогою комутуючого ключа періодично підключається до джерела постійного струму, напруга якого незмінна. В період увімкненого стану ключа струм якоря iя рівний струму ім, що надходить від джерела живлення через ключ К, так як включений паралельно до якоря діод Д у цьому випадку закритий в результаті подачі на його анод від’ємної наруги джерела живлення. Після розмикання К під впливом ЕРС самоіндукції у колі якоря продовжує протікати струм через діод Д, тобто в цей період ія=іД.
|
|
|
На рис.2 зображені діаграми зміни напруги на клемах двигуна uдв і струмів якоря двигуна ія (t), спожитого із мережі ім (t) і через діод іД (t). Діаграми побудовані при умові, що комутація ключа відбувається миттєво, тобто кола джерела живлення і діода не містять індуктивності. При зазначеній умові для даної системи електропривода можна записати наступні рівняння:
для періоду замкнутого стану ключа К
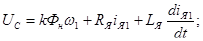 (1а)
(1а)
 (2а)
(2а)
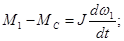 (3а)
(3а)
для періоду розімкненого стану ключа К
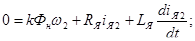 (1б)
(1б)
 (2б)
(2б)
 (3б)
(3б)
де МС і J - відповідно момент статичного навантаження на валу двигуна і момент інерції електропривода.
При записі цих рівнянь прийнято, що джерело живлення володіє властивостями джерела наруги, тобто його внутрішній опір наближається до нуля, а діод Д володіє ідеальними властивостями: його опір рівний нулю у провідному напрямку і нескінченості - у зворотному.
|
|
|
Для аналізу усталеного режиму роботи привода необхідно проаналізувати співвідношення між середніми значеннями струму, моменту, швидкості, напруги. При цьому мається на увазі середні значення вказаних величин за період комутації К. Припускаючи, що за час Тк момент МС=const, із (3а) та (3б) можна знайти:

Для усталеного режиму повинно виконуватися рівність  , тобто миттєве значення швидкості на початку і в кінці періоду повинні бути рівні, якщо ця рівність не виконується, то має місце перехідний процес, а не усталений режим. Враховуючи також, що
, тобто миттєве значення швидкості на початку і в кінці періоду повинні бути рівні, якщо ця рівність не виконується, то має місце перехідний процес, а не усталений режим. Враховуючи також, що  , із попереднього виразу можна знайти:
, із попереднього виразу можна знайти:

Звідси у відповідності з (2а) і (2б)
 (4)
(4)
З іншого боку, із (1а) і (1б)
оскільки в усталеному режимі  .
.
Дата добавления: 2019-07-15; просмотров: 138; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!