Розрахунок системи електропривода з сумуючим підсилювачем
Наведемо рівняння, якими описується електромеханічна характеристика системи електропривода з сумуючим підсилювачем:
 /52/
/52/
де 
 коефіцієнти передачі підсилювача і силового перетворювача;
коефіцієнти передачі підсилювача і силового перетворювача;  еквівалентний опір перетворювача;
еквівалентний опір перетворювача;  коефіцієнт зворотного зв’язку за швидкістю двигуна.
коефіцієнт зворотного зв’язку за швидкістю двигуна.
Вихідними даними для розрахунків коефіцієнтів, які входять в рівняння /53/, є задані технічними умовами діапазон регулювання і статизм нижньої електромеханічної характеристики. Діапазон регулювання  , де
, де  і
і  швидкості ідеальних холостих ходів, що відповідають натуральній і нижній електромеханічній характеристиці. Нижню межу регулювання визначає заданий відносний перепад швидкості, який називається статизмом, при зміні навантаження від нуля до номінального. Отже, статизм замкненої системи регулювання
швидкості ідеальних холостих ходів, що відповідають натуральній і нижній електромеханічній характеристиці. Нижню межу регулювання визначає заданий відносний перепад швидкості, який називається статизмом, при зміні навантаження від нуля до номінального. Отже, статизм замкненої системи регулювання
 /53/
/53/
Підставивши в рівняння /54/  , одержують
, одержують
 /54/
/54/
Формула /54/ показує, що перепад швидкості на нижній характеристиці залежить від діапазону регулювання і статизму.
Функціональна схема системи автоматичного регулювання зі зворотним зв’язком за швидкістю наведена на Рис.6. На ній позначені: ЗШ - задавач швидкості, ПО - сумуючий операційний підсилювач: ШІП, СК - широтно-імпульсний перетворювач з системою керування,
Д - двигун, ТГ - тахогенератор і подільник напруги  .
.
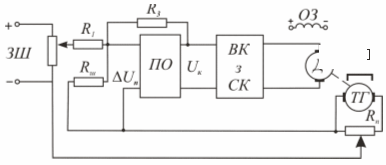
Рис. 6.
Система автоматичного регулювання з широтно-імпульсним перетворювачем є дискретною, але при  kГц її можна вважати безперервною. Тому динаміку такої системи описуватимемо математичним апаратом для неперервних множин.
kГц її можна вважати безперервною. Тому динаміку такої системи описуватимемо математичним апаратом для неперервних множин.
|
|
|
Розв’язавши систему рівнянь /52/ відносно швидкості, одержують рівняння електромеханічної характеристики системи
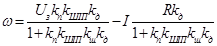 , /53/
, /53/
де  .
.
Або
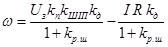 , /55/
, /55/
де  коефіцієнт підсилення розімкненої системи.
коефіцієнт підсилення розімкненої системи.
Поділивши перепад швидкості в розімкненій системі при номінальному навантаженні

на перепад швидкості в замкненій системі
 ,
,
одержимо формулу для визначення необхідного коефіцієнта підсилення розімкненої системи:
 або
або
 . /56/
. /56/
Коефіцієнт зворотного зв’язку за швидкістю визначають, виходячи з стандартної задаючої напруги 10В або 20В, яка має відповідати швидкості ідеального холостого ходу  . Зазвичай, приймають
. Зазвичай, приймають  . Тоді, підставивши в /55/
. Тоді, підставивши в /55/  , одержують
, одержують
 /57/
/57/
З /57/ визначають коефіцієнт зворотного зв’язку
 /58/
/58/
Коефіцієнт передачі керованого випрямляча визначають з уніфікованої характеристики  (рис.7), прийнявши
(рис.7), прийнявши  рівною номінальній напрузі двигуна і
рівною номінальній напрузі двигуна і  .
.
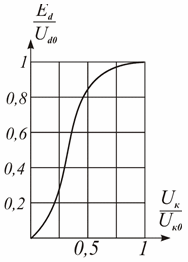
Коефіцієнт передачі керованого випрямляча вираховують із умови роботи привода на мінімальній швидкості. За цієї умови
|
|
|
 ;
;

і  згідно графіка відповідає
згідно графіка відповідає  .
.
Тоді
 , /59/
, /59/
де  напруга керування, яка відповідає
напруга керування, яка відповідає  згідно рис.7.
згідно рис.7.
Для забезпечення заданого статизму  необхідно вибирати сумуючий підсилювач з коефіцієнтом підсилення
необхідно вибирати сумуючий підсилювач з коефіцієнтом підсилення
 . /60/
. /60/
Для реалізації зворотного зв’язку за швидкістю підбираємо за каталогом [Л.2, т.2, с.430, табл.26.15] тахогенератор з постійними магнітами за умов  і
і  . Цим умовам задовольняє тахогенератор ТМГ-30П УЗ з параметрами:
. Цим умовам задовольняє тахогенератор ТМГ-30П УЗ з параметрами:
nтг=4000 об/хв, звідки ωтг=πnтг/30=418,879 рад/с
Евих=230В >  =0,0396∙250,996=9,933В
=0,0396∙250,996=9,933В
Ія. тг=0,087А
kтг=0,549 В∙с/рад
Зазвичай, напруга тахогенератора більша напруги давача  . Тому напругу
. Тому напругу  одержують за допомогою подільника напруги тахогенератора. Опір подільника
одержують за допомогою подільника напруги тахогенератора. Опір подільника
 /61/
/61/
де  струм якоря тахогенератора. Опір подільника приймають дещо більшим розрахункового, наприклад
струм якоря тахогенератора. Опір подільника приймають дещо більшим розрахункового, наприклад  =2370 Ом. Тоді опір резистора
=2370 Ом. Тоді опір резистора

Опір резистора  .
.
Щоби струм у колі зворотного зв’язку не зумовлював нелінійність, більшу 1%, опір кола зворотного зв’язку повинен бути більшим за опір  в 25 разів. При такому опорі в колі зворотного зв’язку буде протікати струм
в 25 разів. При такому опорі в колі зворотного зв’язку буде протікати струм
 .
.
За цієї умови струм в резисторі подільника
 .
.
Для вибору резисторів за каталогом необхідно визначити їх потужності:
|
|
|
 ;
;
 .
.
Резистором R2 обираємо С5-42В з номінальним опором 2,2 кОм, потужністю розсіювання 10 Вт, допустиме відхилення опору від номінального  (
(  ).
).
В якості резистора R1 використаємо підстроювальний резистор СП5-3В-1Вт з повним опором 220 Ом та номінальною потужністю розсіювання 1 Вт, відхилення повного опору від номінального  (
(  ), кількість обертів - 40. Його використання дозволить точно встановити коефіцієнт передачі подільника напруги, оскільки регулюванням опору R1 можна компенсувати відхилення опору резистора R2 від номінального.
), кількість обертів - 40. Його використання дозволить точно встановити коефіцієнт передачі подільника напруги, оскільки регулюванням опору R1 можна компенсувати відхилення опору резистора R2 від номінального.
Дата добавления: 2019-07-15; просмотров: 141; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!