Основные понятия и определения
При создании МСУ различного назначения в качестве их основы широко используются два класса средств цифровой техники:
1. устройства с жесткой структурой, выполненные на базе цифровых логических схем;
2. электронные вычислительные машины (ЭВМ).
Устройства с жесткой структурой обычно содержат большое число интегральных схем (ИС) малой и средней степени интеграции. Эти схемы устанавливаются на платах, а их выводы соединяются в соответствии с реализуемыми функциями. Любое изменение функций требует изменения схемы.
Системы на основе ЭВМ могут легко перестраиваться с реализации одной функции на другую, для этого достаточно составить и занести в память новую программу. При использовании серийных ЭВМ это значительно сокращает сроки проектирования, изготовления и настройки системы. Однако высокая стоимость ЭВМ часто делает экономически нецелесообразной разработку цифровых систем на основе этого подхода.
Указанные обстоятельства привели к появлению нового подхода к проектированию цифровых систем - на основе программируемой логики. Этот подход предполагает использование при построении систем стандартной универсальной БИС (одной или нескольких), работающих под программным управлением, которая получила название микропроцессора (МП).
Микропроцессор - это обрабатывающее и управляющее устройство, выполненное с использованием технологии БИС (часто на одном кристалле) и обладающее способностью выполнять под программным управлением обработку информации, включая ввод и вывод информации, арифметические и логические операции и принятие решений.
|
|
|
Контроллер - это микро-ЭВМ с небольшими вычислительными ресурсами, обедненной периферией и упрощенной системой команд ориентированная не на производство вычислений, а на выполнение процедур логического управления различным оборудованием. Контроллеры часто применяют в качестве встраиваемых в различные станки, машины, технологические процессы.
Микроконтроллер - это микропроцессорное устройство ориентированное не на производство вычислений, а на реализацию заданной функции управления.
Микропроцессорная система (МП-система, МПС) - специализированная информационная или управляющая система, построенная на основе микропроцессорных средств, т. е. набора микропроцессорных схем.
Архитектура простейших микропроцессорных систем управления
Магистрально-модульный принцип построения МПС показан на рисунке 1.
В МПС все связи между отдельными функциональными блоками осуществляются, как правило, шинами. Под шиной подразумевается физическая группа передачи сигналов, обладающих функциональной общностью (по каждой линии передается один двоичный разряд информации). Физически шины реализуются в виде параллельных проводящих участков печатной платы или жгутов. Кроме шины данных (ШД), как правило, различают шину адреса (ША) и шину управления (ШУ). Передаваемые по ША адреса формируются в МП. Они необходимы для определения пути передачи данных внутри МПС, в том числе для выбора ячейки памяти, куда необходимо занести или откуда необходимо считать информацию. В определении такта передачи могут принимать участие и управляющие сигналы, подсоединяющие или, наоборот, блокирующие те или иные устройства МПС. В отличие от ША и ШУ шина данных является шиной двунаправленной. Данные по этой шине могут передаваться от микропроцессора к какому-нибудь устройству МПС либо пересылаться в МП от какого-то устройства, доступ к которому обеспечивают сигналы адресной шины. Естественно, что в каждый момент времени данные могут передаваться лишь в одном направлении, определяемом режимом работы микропроцессора.
|
|
|
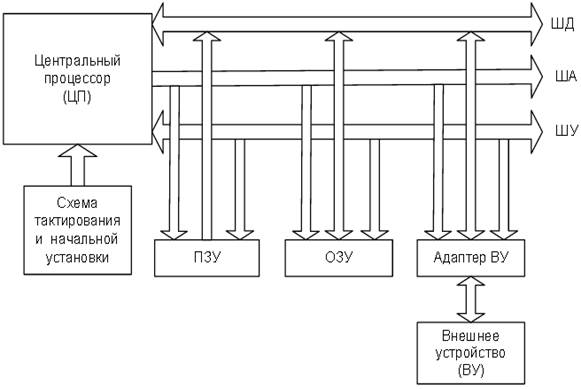
Рисунок 1 - Архитектура простейших микропроцессорных систем управления
Основные режимы работы МСУ
К основным режимам работы относятся:
|
|
|
1) запись данных в память машины;
2) чтение данных из памяти машины;
3) пересылку данных в устройство ввода/вывода;
4) чтение данных с устройства ввода/вывода;
5) выполнение операций с содержимым внутренних регистров микропроцессора.
Работа МСУ представляет собой следующий набор действий:
1. Микропроцессор формирует адрес, по которому хранится код операции команды, переводя в соответствующее состояние шину адреса.
2. Код операции считывается из памяти по сформированному адресу и пересылается в микропроцессор.
3. Микропроцессор дешифрирует (идентифицирует) команду.
4. Микропроцессор настраивается на выполнение одного из перечисленных выше пяти основных режимов в соответствии с результатами дешифрирования считанного из памяти кода команды.
Программируемые контроллеры
Любая машина, способная автоматически выполнять некоторые операции, имеет в своем составе управляющий контроллер, т.е. модуль, обеспечивающий логику работы устройства. Контроллер — это мозг машины. Технически контроллеры реализуют по-разному. Это может быть:
· механическое устройство;
· пневматический или гидравлический автомат;
· релейная или электронная схема;
· компьютерная программа.
|
|
|
ПЛК представляет собой блок, имеющий определенный набор выходов и входов, для подключения датчиков и исполнительных механизмов. Логика управления описывается программно на основе компьютерного ядра. Абсолютно одинаковые ПЛК могут выполнять совершенно разные функции. Причем для изменения алгоритма работы не требуется каких-либо переделок аппаратной части. Аппаратная реализация входов и выходов ПЛК ориентирована на сопряжение с унифицированными приборами и мало подвержена изменениям.
Бинарные входы ПЛК способны принимать только два состояния – логического нуля и логической единицы. Так, наличие тока (или напряжения) в цепи входа считается обычно логической единицей. Отсутствие тока (напряжения) означает логический ноль. Датчиками, формирующими такой сигнал, являются кнопки ручного управления, концевые датчики, датчики движения, контактные термометры и др.
В современных ПЛК широко используют, аналоговые входы и выходы. Аналоговый, или непрерывный, сигнал отражает уровень напряжения или тока, соответствующий некоторой физической величине в каждый момент времени.
К параметрам аналоговых входов ПЛК относят:
· разрядность аналого-цифрового преобразователя (АЦП);
· диапазон входного сигнала;
· время и метод преобразования;
· несимметричный или дифференциальный вход;
· уровень шума и нелинейность;
· возможность автоматической калибровки;
· программная или аппаратная регулировка коэффициента усиления;
· фильтрация.
Входы-выходы ПЛК не всегда должны быть сосредоточены в общем корпусе с процессорным ядром. В настоящее время больше распространены технические решения, позволяющие полностью отказаться от прокладки кабелей для аналоговых цепей. Входы-выходы ПЛК выполняют в виде миниатюрных модулей, расположенных в непосредственной близости от датчиков и исполнительных механизмов. Соединение подсистемы ввода-вывода с ПЛК выполняют посредством одного общего цифрового кабеля или с применением беспроводных технологий.
Контроллеры работают в нижнем звене автоматизированных систем управления предприятием (АСУ) — систем, непосредственно связанных с технологией производства. ПЛК являются первым шагом при построении систем АСУ. Это объясняется тем, что необходимость автоматизации отдельного механизма или установки всегда очевидна. Она дает быстрый экономический эффект, улучшает качество производства, позволяет избежать физически тяжелой и рутинной работы.
В настоящее время появился целый класс программного обеспечения, реализующего интерфейс (связь) человек—машина (ММI). Это системы сбора данных и оперативного диспетчерского управления – SCADA -системы. Современные SCADA-системы выполняют с обязательным применением средств мультимедиа.
SCADA-системы позволяют:
· накапливать полученные данные;
· проводят их хранение и анализ;
· определяют критические ситуации;
· производят оповещение персонала по каналам телефонной и радиосети;
· позволяют создавать сценарии управления;
· формируют данные для анализа экономических характеристик производства.
Основной задачей в области микропроцессорной техники является интеграция нескольких ПЛК с целью синхронизации их работы. В этом случае появляются сети, обладающие рядом специфических требований:
1) режим реального времени;
2) надежность в условиях промышленной среды;
3) ремонтопригодность;
4) простота программирования.
Лабораторная работа № 1
Управление освещением в длинном коридоре
Цель работы: научиться работать на языке LD в «CoDeSys». Разработать на языке LD программу управления освещением в коридоре первого этажа первого корпуса ИжГСХА.
Программа работы.
Есть длинный коридор на первом этаже первого корпуса ИжГСХА, который расположен по адресу ул. Студенческая, 11. Для управления освещением в коридоре используются три переключателя:
· Msw- главный переключатель
· Bsw – датчик, установленный в начале коридора.
· Esw – датчик, установленный в конце коридора.
Подача питания в коридор осуществляется с помощью переключателя Msw.
1. Необходимо решить задачу включения/выключения света с помощью любого из двух датчиков Bsw и Esw, установленных в разных концах коридора. При входе в коридор с одной стороны необходимо переключить Bsw, чтобы зажечь свет. На выходе с другой стороны коридора необходимо переключить Esw, чтобы свет погас, и наоборот.
2. Разработать программу на языке LD и визуализацию решения задачи.
ОБЩИЕ СВЕДЕНИЯ
Дата добавления: 2019-02-26; просмотров: 569; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!