Запуск проекта осуществляется командой «Онлайн» / «Режим эмуляции» / «Подключение» / «Старт». Остановка программы осуществляется командой «Онлайн» / «Отключение».
Визуализация проекта
Создайте визуализацию задачи и протестируйте ее, как показано на рисунках 25, 26.
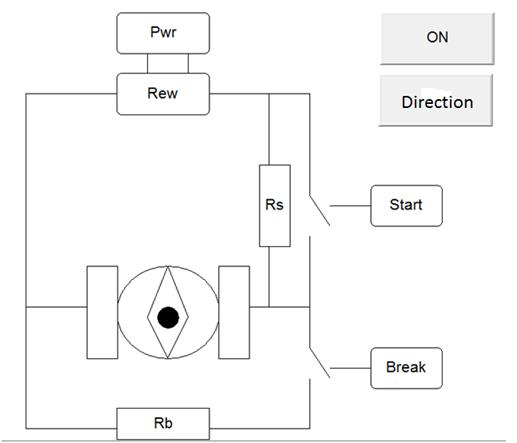
Рисунок 25 — Визуализация программы управления двигателя
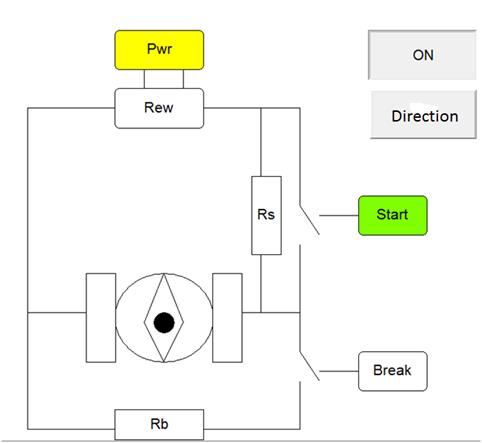
Рисунок 26 — Запуск двигателя
Настройки отдельных объектов визуализации
Кнопка « On ». Можно задать параметры объектов визуализации, нажав двойным щелчком мыши на объект. На экране появиться диалоговое окно с параметрами (рис. 27).
В этом окне можно:
· задать название объекта во вкладке «Текст»;
· организовать связь кнопки «On» на визуализации и соответствующей переменной программы (рис. 27).
Кнопка « Direction » настраивается аналогичным образом.
Элементы «Pwr», «Rew», «Start», «Break». Можно задать параметры объектов визуализации, нажав двойным щелчком мыши на объект. На экране появиться диалоговое окно с параметрами (рис. 28).
В этом окне можно:
· задать название объекта во вкладке «Текст»;
· назначить переменную изменения цвета (рис. 28);
· выбрать цвета заливки во включенном и выключенном режиме выключателя (рис. 29).
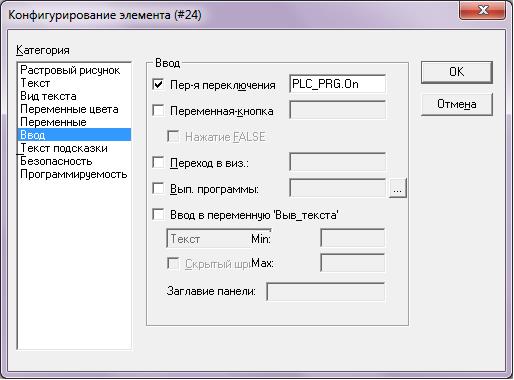
Рисунок 27 — Организация связи объекта на визуализации и переменной программы
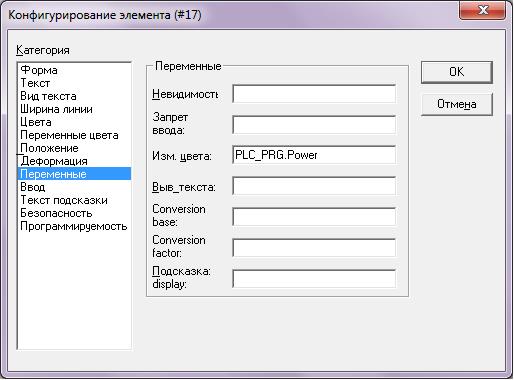
Рисунок 28 — Организация связи объекта на визуализации и переменной программы
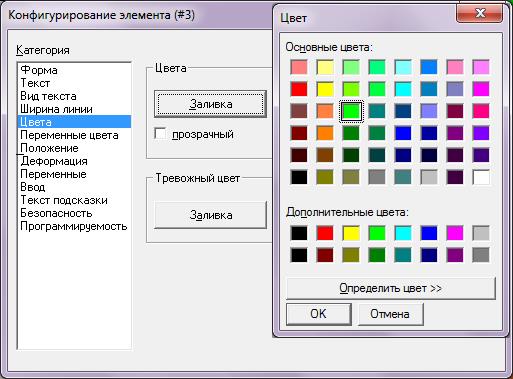
Рисунок 29 — Выбор цветов заливки во включенном и выключенном режимах
Настройки объектов « Rew », « Start », « Break » выполняются аналогичным способом.
Содержание отчета по лабораторной работе
1. Цель работы.
|
|
|
2. Постановка задачи.
3. Схема управления приводом реверсивного двигателя.
4. Список объявленных переменных в программе.
5. Программа на языке LD управления реверсивным приводом.
6. Визуализация задачи при различных режимах работы двигателя.
7. Выводы.
Контрольные вопросы
1. Что собой представляет язык LD в «CoDeSys»?
2. Основные элементы языка LD.
3. Как создать элементы языка LD (перечислить все возможные способы)?
4. Типы данных в «CoDeSys».
5. Для чего предназначена визуализация и как ее создать?
6. Как работает система управления двигателем на языке LD?
7. Как настроить объект «Pwr», «Rew», «Start», «Break» на визуализации?
8. Как настроить объект «On» на визуализации?
9. Каким образом переключить двиатель на реверсивное движение?
10. Двигатели постоянного тока.
11. Устройство и принцип действия двигателей постоянного тока.
Лабораторная работа № 3
Управление положением запорно-регулирующим клапаном на трубопроводе системы вентиляции
Цель работы: Разработать программу управления положением ЗРК на трубопроводе системы вентиляции в программном комплексе промышленной автоматизации CoDeSys.
Программа работы.
1. Составить схему управления положением запорно-регулирующего клапана на трубопроводе системы вентиляции в программном комплексе СoDeSys.
|
|
|
2. Программу реализовать на языке CFC.
3. Проверить работоспособность программы.
Методические указания
На рисунке 30 представлена программа управления положением ЗРК. В схему управления входят следующие блоки: блок PID, блок LIN_TRAFO, блок VALVE_REG, блок LIMIT.
Рисунок 30 – Программа управления ЗРК
Для разработки программы управления скоростью асинхронного двигателя в системе теплоснабжения необходимо использовать следующие блоки.
Блок PID (слева) предназначен для управления температурой. На его первый вход VALUE поступает текущее значение контролируемой величины с датчика температуры. На втором входе SETPOINT задается уставка. Переменные KP, TN, TV определяют соответственно коэффициент передачи, постоянные времени дифференцирования и интегрирования ПИД-регулятора. Вход RESET предназначен для сброса интегральной составляющей ПИД-регулятора и возможности управлять температурой в ручном режиме.
В программе для управления положением ЗРК в системе ГВС также используются блоки LIN_TRAFO (второй) и VALVE_REG (третий). Блок LIN_TRAFO необходим для линейного преобразования значения (--100..100) выхода Y блока PID в значение, приемлемое (0..100) для входа IN_VAL блока VALVE_REG. Преобразованное значение записывается в переменную OUT, которая показывает, насколько должен быть открыт ЗРК (от 0 до 100%). В то время как его степень открытия на текущий момент отображается в переменной POSITION четвертого блока LIMIT.
|
|
|
Третий блок VALVE_REG предназначен для управления ЗРК датчиком положения. На выходе этого блока вырабатываются дискретные сигналы на открытие (OPEN) или закрытие (CLOSE) ЗРК.
Дата добавления: 2019-02-26; просмотров: 438; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!