ТИПОВЫЕ ЭЛЕМЕНТЫ И УЗЛЫ АСР И ЭВМ.
Бесконтактные переключающие устройства
1 Общие сведения и классификация аппаратуры управления.
2 Общие сведения о бесконтактных устройствах управления.
3 Основные положения алгебры логики. Логический элемент.
4 Реализация бесконтактных переключающих устройств.
5 Схемы управления реверсивным двигателем
1. Для коммутации силовых цепей управления систем автоматики применяют разнообразные электромеханические аппараты, имеющие подвижные контакты для соединения электрических цепей, и бесконтактные аппараты, в которых отсутствуют подвижные устройства, а электрическая цепь создается за счет гальванических связей и проводимости проводников и полупроводников и электронных элементов. В металлургическом производстве наибольшее распространение получили электромеханические аппараты общетехнического применения. Их можно разделить на две основные группы: аппараты ручного (неавтоматического) управления и аппараты автоматического управления.
Аппараты ручного управления приводи т в действие оператор, обслуживающий автоматические установки. К этой группе относятся кнопки управления и кнопочные станции, рубильники, пакетные и универсальные переключатели и т.д.
Аппараты автоматического управления приходят в действие от электрических сигналов (команд), подаваемых первичными преобразователями и командными аппаратами, на которые первоначально может воздействовать оператор. К их числу относятся шаговые искатели, командоаппараты, контроллеры и пускатели, бесконтактные аппараты и др.
|
|
|
По роду тока аппараты управления подразделяют: по коммутации – аппараты с постоянного и переменного тока; по приведению в действие – с катушками на постоянном и переменном токе.
Основной недостаток контактных аппаратов управления – образование в процессе коммутации электрической искры или дуги между контактами. От этого недостатка свободны бесконтактные аппараты, в которых отсутствуют подвижные электрические контакты. Поэтому основной технической характеристикой каждой контактной системы является ее допустимая разрывная мощность.
Реле, контакторы и магнитные пускатели, как было отмечено в лекции 2.1.2, можно отнести к переключающим устройствам.
2. Контактные аппараты управления обладают целым рядом недостатков:
- подвижные части при частом включении сравнительно недолговечны, что вызывает большое число отказов и сбоев в работе;
- время срабатывания заметно влияет на быстродействие всей схемы автоматики;
- требуют профилактических осмотров, регулировок или частой замены.
В настоящее время наряду с контактными аппаратами используются бесконтактные устройства, обладающие высокими надежностью и быстродействием.
|
|
|
Как правило, бесконтактные устройства не имеют подвижных частей. В процессе работы их электрические цепи не разрываются (отсюда название «бесконтактные»), а сигналы управления возникают вследствие дискретного изменения параметров составляющих элементов, с нелинейными статическими характеристиками (транзисторы, диоды и т.п.). Эти аппараты управления – транзисторные, магнитные логические элементы и схемы с тиристорами. Бесконтактные устройства более надежны, чем контактные электромеханические аппараты, имеют высокое быстродействие, но более чувствительны к внешним электрическим помехам и воздействию температуры. Влияние указанных недостатков можно значительно снизить правильным построением схем бесконтактных устройств.
Бесконтактные устройства, как и контактные аппараты, обладают дискретным действием, т.е. характеризуются двумя состояниями, соответствующими понятиям «включено» и «выключено». Под состоянием «включено» у бесконтактных устройств понимается состояние, когда на их выходе имеются сигналы с требуемыми параметрами (напряжением или током). Отсутствие напряжения и тока на выходе соответствует состоянию «выключено».
|
|
|
Наиболее распространены в схемах управления логические элементы, на основе которых строится логическая часть системы управления, где в зависимости от входных сигналов появляются соответствующие выходные. Выходные сигналы через усилитель поступают на исполнительные устройства.
Бесконтактные схемы могут быть собраны с помощью логических элементов, выполняющих элементарные логические функции.
2. На рисунке 2.5.1,а показана последовательность импульсов импульсной АСР. На определенных временных позициях либо есть импульсы, либо их нет. На рисунке 2.5.1,б по статической характеристике видно, что выходная величина принимает два фиксированных значения – включено, выключено – да, нет. На рисунке 2.5.1,в показан цифровой двоичный код – цифра 5, представленный определенным набором нулей и единиц.
 Увых Увых
Увых Увых
Нет Да Нет Да Нет

 Да Да Да Да Да Да
Да Да Да Да Да Да


 0 1 0 1 0
0 1 0 1 0
|
|
|
Нет Нет 1 2 3 4 5
 t t
t t
1 2 3 4 1 2 3 4
а б в
Рисунок 2.5.1
Такое представление сигналов соответствует представлению чисел (сигналов) в алгебре логики, которая является разделом математики. Она основывается на взаимообусловленности истинных (достоверных) и ложных суждений или высказываний.
Простые суждения представляются элементарными функциями, состоящими из двух аргументов (переменных): истинно – ложно либо да – нет, которые могут быть обозначены различными условными математическими символами. Общепринятыми знаками считаются 1 – для записи истинного и 0 – для ложного суждений.
Из элементарных логических функций могут быть составлены сложные логические функции. В теории алгебры логики разработаны теоремы, по которым производится преобразование логических функций на основе законов – переместительного, сочетательного, инверсии и других.
Для функции У = f(Х1,Х2) из 16 логических функций выделим пять типовых функций:
1. У = Х1 + Х2 = Х1 V Х2 - дизъюнкция, логическое сложение, функция ИЛИ;
2. У = Х1×Х2 = Х1  Х2 – конъюнкция, логическое умножение, функция И;
Х2 – конъюнкция, логическое умножение, функция И;

 3. У = Х1 - инверсия, логическое отрицание, функция НЕ;
3. У = Х1 - инверсия, логическое отрицание, функция НЕ;
 4. У = Х1 + Х2 - операция Пирса, отрицание ИЛИ, функция ИЛИ-НЕ;
4. У = Х1 + Х2 - операция Пирса, отрицание ИЛИ, функция ИЛИ-НЕ;
5. У = Х1×Х2 - операция Шефера, отрицание И, функция И-НЕ.
Эти типовые функции связаны в так называемую таблицу истинности состояний логических переменных (таблица 2.5.1).
Таблица 2.5.1 – Состояние логических переменных (таблица истинности).
| Х1 | Х2 | У | ||||
| Сложение | Умножение | Отрицание | Отрицание сложения | Отрицание умножения | ||
| ИЛИ | И | НЕ | ИЛИ - НЕ | И-НЕ | ||
| 0 | 0 | 0 | 0 | 1 | 1 | 1 |
| 0 | 1 | 1 | 0 | 1 | 0 | 1 |
| 1 | 0 | 1 | 0 | 0 | 0 | 1 |
| 1 | 1 | 1 | 1 | 0 | 0 | 0 |
Двухзначные логические функции легко реализуются двухпозиционными элементами с двумя устойчивыми состояниями – контактными и бесконтактными – логическими элементами.
Логический элемент – элемент дискретного действия, выполняющий преобразование управляющего сигнала в соответствии с законами алгебры логики.
Достоинствами контактных элементов (реле) – отсутствие гальванической связи между входом и выходом и возможность одновременно коммутировать несколько цепей с относительно большими токами. Недостатки реле – пониженная надежность контактных соединений и малое быстродействие из-за электромагнитной и механической инерционности. Поэтому контактные реле применяются в основном как входные и выходные разделители и коммутирующие устройства, а также в схемах автоматики с небольшим числом переключений в единицу времени.
Бесконтактные логические элементы обладают высокими надежностью и быстродействием. Широко применяются в современных системах автоматики с большим числом логических операций на коротком интервале времени
 Входная Х и выходная У переменные логического элемента принимают только одно из двух значений: логический нуль (низкий уровень сигнала) или логическую единицу (высокий уровень сигнала).
Входная Х и выходная У переменные логического элемента принимают только одно из двух значений: логический нуль (низкий уровень сигнала) или логическую единицу (высокий уровень сигнала).
На рисунке 2.5.2 изображена характеристика управления логического элемента. Заштрихованы зоны входного и выходного напряжения, соответствующие значениям 0 и 1 логических перемещений Х и У.
 Логическому нулю соответствует напряжение Uвх(0) = Uвых(0) £ 0,1×Uпит. Для логической единицы Uвх(1) = Uвых(1) > 0,8×Uпит.
Логическому нулю соответствует напряжение Uвх(0) = Uвых(0) £ 0,1×Uпит. Для логической единицы Uвх(1) = Uвых(1) > 0,8×Uпит.
На рисунке 2.5.3 показаны релейная реализация логических элементов контактного типа и условные обозначения бесконтактных логических элементов.
| ИЛИ | И | НЕ | ИЛИ-НЕ | И-НЕ | ||||||||||||||||||||||||
       Х1 Х1
 У
Х2 У
Х2
|
   Х1 Х2 У Х1 Х2 У
|
Х1 У
|
    Х1 Х2 У Х1 Х2 У
| Х1
  У У
 Х2 Х2
| ||||||||||||||||||||||||
 Х1 1 Х1 1
  У У
 Х2 Х2
|
 Х1 & У Х1 & У
 Х2
Х2
|
 Х1 У Х1 У
|
 Х1 1 У Х1 1 У
Х2
|
Х1 & У
Х2
|







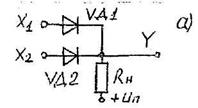
3. Рассмотрим пример реализации логических бесконтактных элементов.
Схема, представленная на рисунке 2.5.4,а реализует логическую функцию ИЛИ. Для работы схемы необходимо, чтобы Rн >> Riд + Rип, где Riд – внутреннее сопротивление открытого диода, а Rип – внутреннее сопротивление источника питания.
|
|
 |
Рисунок 2.5.4
В исходном состоянии диоды заперты. Если хотя бы на один вход подано положительное напряжение, соответствующее логической единице, то соответствующий диод откроется и через него потечет ток. На выходе появится сигнал логической единицы, равный падению напряжения на резисторе.
Схема на рис. 2.5.4,б реализует операцию И. В исходном состоянии диоды открыты и на выходе низкий потенциал, соответствующий логическому нулю. Если на оба входа поданы одновременно положительные импульсы или положительные перепады напряжения, то диоды запираются и на выходе появляется высокий потенциал, соответствующий логической единице (У=Uпит).
Логическая операция НЕ реализуется инвертором (рис. 2.5.5,а). В исходном состоянии транзистор заперт, так как потенциал базы практически равен нулю (база через внутреннее сопротивление источника входных сигналов подсоединена к корпусу) У=Uпит (У=1). При подаче на вход транзистора положительного перепада напряжения транзистор отпирается и на выходе системы появляется У=0, так как устанавливается низкий потенциал.
|
|

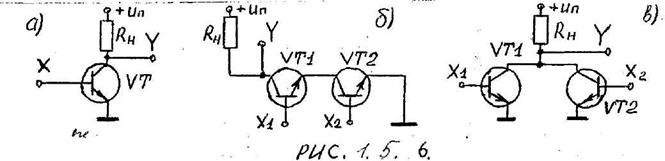
Рисунок 2.5.5
В схеме, на рис. 2.5.5,б два запертых транзистора включены последовательно. Если на входы одновременно подать положительный перепады напряжения, то транзисторы откроются, и на выходе установится низкий потенциал. Реализуется операция И-НЕ.
Электрическая схема, реализующая функцию ИЛИ-НЕ, изображена на рис. 2.5.5,в. Она состоит из двух транзисторов со связанными коллекторами и общего коллекторного резистора. В исходном состоянии оба транзистора заперты и на выходе имеется сигнал логической единицы (У=1). Если хотя бы на один вход подать положительный сигнал, то соответствующий транзистор откроется и на выходе схемы потенциал понизится У=0.
4. В качестве примера рассмотрим две схемы управления нереверсивным электродвигателем: релейно-контактную (рис.2.5.6,а) и схему, выполненную на бесконтактных элементах (рис.2.5.6,б).
При работе по схеме, показанной на рис. 2.5.6,а включение контактора осуществляется кнопкой SB1 «Пуск», при нажатии на которую замыкаются ее разомкнутый контакт и цепь питания катушки пускателя КМ. Пускатель КМ главными (силовыми) контактами КМ2 (рис. 2.5.6,в) подключает двигатель М к сети. При этом ротор двигателя начнет вращаться. С помощью блокировочного контакта КМ1 напряжение на катушке удерживается и после того, как кнопка SB1 отпущена (ее контакт разомкнется). Для остановки двигателя напряжение с катушки контактора должно быть снято. Это может быть достигнуто нажатием на кнопку SB2 «Стоп» (размыканием ее контактов) либо размыканием контактов теплового реле КК (последнее срабатывает при длительной перегрузке двигателя).
При управлении пускателем КМ с использованием логических элементов (рис. 2.5.6,б) в исходном состоянии схемы пускатель отключен.
SB1 КМ


 SB2 КК
SB2 КК

 КМ1
КМ1

КМ
а)
КК КК
 SB1
SB1
SB2 Х1 КМ
Х2 РД
 |  |  |
 КК
КК
1 2 3 в)
б)
Рис.2.5.6 – Схемы управления нереверсивным электроприводом:
а) – релейно-контактная; б) - на бесконтактных элементах; в) – силовая схема;
1 - элемент И – НЕ; 2 – элемент ПАМЯТЬ; 3 – выходной элемент (усилитель)
При нажатии на кнопку SB1 возникает сигнал на входе элемента 2. Появившийся сигнал на его выходе поступает на вход элемента 3, к выходу которого подключена катушка пускателя КМ. Под действием выходного напряжения в катушке начинает протекать ток, достаточный для срабатывания пускателя. При отпускании кнопки SB1 схема остается в работе, так как элемент 2 “запомнил” входную команду. Снятие выходного сигнала у элемента 2 осуществляется нажатием на кнопку SB2 или разрывом контакта КК теплового реле. При разрыве хотя бы одной из входных цепей элемента 1 на его выходе появляется сигнал, поступающий на вход Х2, с помощью которого триггер (элемент 2) перебрасывается, и сигнал на его выходе исчезает, что приводит к обесточиванию катушки пускателя. Двигатель М отключается от сети.
Схемы с тиристорами применяют в системах автоматики для бесконтактной коммутации цепей переменного тока (бесконтактные пускатели, ключи и преключатели); для преобразования постоянного тока в переменный (инверторы и преобразователи частоты); для получения различных режимов работы электроприводов.
Дата добавления: 2019-02-22; просмотров: 424; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!