ИЗМЕРИТЕЛЬНЫЕ СХЕМЫ И СИСТЕМЫ ДИСТАНЦИОННОЙ ПЕРЕДАЧИ ПОКАЗАНИЙ
1 Измерительные схемы:
А) Мостовая измерительная схема.
Б) Компенсационная измерительная схема.
В) Дифференциальная измерительная схема.
2 Автоматическая измерительная схема.
3 Системы дистанционной передачи показаний (СДПП).
А. Потенциометрическая и дифференциально-трансформаторная СДПП.
Б. Электросиловая СДПП.
В. Сельсинная СДПП.
1 Измерительные схемы применяются для определения включения датчиков с целью измерения контролируемых величин и преобразования полученного сигнала для удобства дальнейшей обработки.
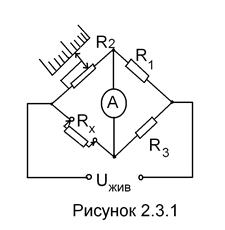 1.А Схема, имеющая четыре плеча, к одной диагонали которой подводится напряжение питания, а с другой диагонали снимается выходное напряжение, называется мостовой измерительной схемой или просто мостом.
1.А Схема, имеющая четыре плеча, к одной диагонали которой подводится напряжение питания, а с другой диагонали снимается выходное напряжение, называется мостовой измерительной схемой или просто мостом.
Она используется для преобразования изменения активного сопротивления, индуктивности или емкости датчика в изменение величины тока или напряжения.
На рисунке 2.3.1 показана равновесная (балансная) мостовая схема, предусматривающая нулевой метод измерения.
При равновесии мостовой схемы ток в измерительной диагонали равен нулю. Условие равновесия записывается в виде:
R2× R3 = R1× Rх Rх =  = К× R2
= К× R2
Оператор вручную перемещает подвижный контакт R2 до тех пор, пока не установит ток, равный нулю, а затем по шкале производит отсчет. Если под влиянием внешних факторов Rх изменится (температура, давление, освещенность), то оператор вновь в ручную восстанавливает равновесие схемы.
|
|
|
Достоинство схемы в том, что она может работать на переменном и постоянном токах.
2. Принцип компенсации заключается в том, что измеряемое напряжение уравновешивают (компенсируют) равным и противоположным по знаку падением напряжения, значение которого определяется с требуемой точностью (рис. 2.3.2).
 Уравновешивающее падение напряжения снимается с реохорда и фиксируется положением движка. Равенство измеряемого и компенсирующего напряжений определяется по нуль указателю (амперметру Аук).
Уравновешивающее падение напряжения снимается с реохорда и фиксируется положением движка. Равенство измеряемого и компенсирующего напряжений определяется по нуль указателю (амперметру Аук).
Действительно, если Iук = 0, то
Uх = Uо = Iо× Rк
Постоянство тока Iо поддерживается с помощью регулятора Rрег в цепи батареи питания.
Схема может работать как на постоянном токе так и на переменном. Она обеспечивает высокую точность измерения, так как в момент измерения от Uх мощность не потребляется (Iук = 0).
3. Дифференциальная схема представляет собой электрическую цепь состоящую из смежных контуров, в каждом из которых действует отдельная ЭДС (рис. 2.3.3)
 Измерительный прибор (амперметр) включен в общую для обоих контуров цепь и реагирует на разность контурных токов.
Измерительный прибор (амперметр) включен в общую для обоих контуров цепь и реагирует на разность контурных токов.
Если Е1 =Е2 и Zх = Z2, то I1 = I2 и Iпр = 0. При изменении под влиянием внешних факторов Zх появляется ток прибора, зависящий от изменений Zх.
|
|
|
Недостаток схемы в том, что она может использоваться только на переменных токах, но у нее большие функциональные возможности: переменными могут быть и Zх и Z2 и оба вместе, Е1 или Е2 или обе вместе.
|
|
|
 2.Автоматическую измерительную схему рассмотрим на примере автоматического потенциометра (рис. 2.3.4) предназначенного для измерения термо-ЭДС, при чем с автоматической термокомпенсацией влияния температуры tо холодных концов термоэлектрического преобразователя ТП.
2.Автоматическую измерительную схему рассмотрим на примере автоматического потенциометра (рис. 2.3.4) предназначенного для измерения термо-ЭДС, при чем с автоматической термокомпенсацией влияния температуры tо холодных концов термоэлектрического преобразователя ТП.
В схеме напряжение компенсации Uо вырабатывается специальной мостовой схемой. Если Uо = Е(t,tо), то DU = 0 и реверсивный двигатель РД не вращается, так как напряжение управления Uу на выходе электронного усилителя-преобразователя равно нулю. При изменении Е(t,tо) под влиянием изменения температуры на выходе усилителя появляется рассогласование DU.
РД начинает вращается, перемещая стрелку указателя и подвижный контакт реохорда до тех пор, пока не станет равным нулю DU. Если изменить tо, то изменяется и Е(t,tо), но при этом изменяется в туже сторону и на такую же величину Uо благодаря специальному подбору резисторов моста R1, R2, R3 и Rм.
|
|
|
R1, R2, R3 выполнены из манганина, электрическое сопротивление которого практически не изменяется при изменении температуры, а Rм – термопреобразователь сопротивления типа ТСМ. Мост содержится под температурой свободных концов tо.
 |  | ||
3.А.Потенциометрическая и дифференциально-трансформаторная схемы дистанционной передачи показаний (СДПП) показаны на рисунке 2.3.5.
а) б)
Рисунок 2.3.5
Потенциометрическая схема (рис.2.3.5,а) состоит из двух потенциометров, один из которых находится на контролируемом объекте, а второй на пульте контроля, электронного усилителя и реверсивного двигателя с редуктором. При согласованном положении подвижных контактов потенциометров напряжение рассогласование равно нулю ( DU = 0) и напряжение управления реверсивного двигателя (РД) равно нулю. Если на контролируемом объекте под влиянием внешнего воздействия изменится положение подвижного контакта R1, то на входе усилителя-преобразователя появляется напряжение рассогласование DU. Оно усиливается и подается на обмотку управления реверсивного двигателя. РД начинает вращаться и перемещает через редуктор стрелку указателя и подвижный контакт потенциометра R2 до тех пор, пока подвижные контакты потенциометров вновь не займут согласованные положения и рассогласование станет равным нулю ( DU =0).
|
|
|
Схема может работать на постоянном и переменном токах.
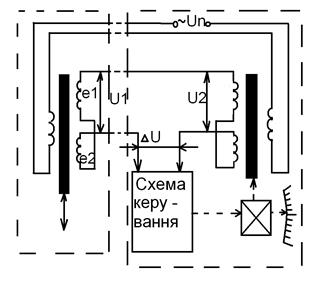
Дифференциально-трансформаторная схема (рис. 2.3.5,б) отличается от потенциометрической только тем, что вместо потенциометрических датчиков используются дифференциальные трансформаторы. Если сердечник датчика находится в серединном положении, то ЭДС выходных обмоток равны между собой е1=е2. Так как обмотки включены встречно, то U =е1 – е2 = 0. При смещении сердечника е1 ¹ е2, появляется U1 и DU и в схеме происходят процессы аналогичные процессам предыдущей схемы.
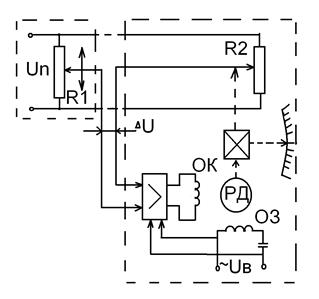
3.Б. На рисунке 2.3.6 показана электросиловая (токовая) СДПП.
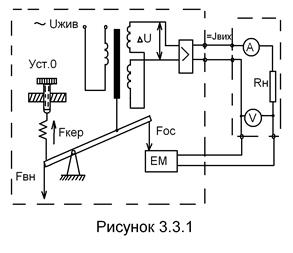 В исходном состоянии в равновесии, сердечник находится в среднем положении и DU=0. Если выходное напряжение дифференциального трансформатора по какой-либо причине не равны нулю при отсутствии внешнего воздействия, то регулировкой «Установка 0» добиваются DU=0 и Iвых = 0.
В исходном состоянии в равновесии, сердечник находится в среднем положении и DU=0. Если выходное напряжение дифференциального трансформатора по какой-либо причине не равны нулю при отсутствии внешнего воздействия, то регулировкой «Установка 0» добиваются DU=0 и Iвых = 0.
|
В схеме наступает новое состояние равновесия, когда выполняется равенство:
Fвн = Fос + Fупр,
где Fупр – сила упругой деформации регулировочной пружины.
В. Сельсинная схема дистанционной передачи показаний состоит из двух сельсинов – датчика СД и приемника СП и может служить как для передачи на расстояние угловых перемещений, так и для получения выходного напряжения, зависящее от угла рассогласования роторов сельсина – датчика и сельсина – приемника. В первом случае режим работы сельсинов называется индикаторным (рис. 2.3.7,а), а во втором случае – трансформаторным (рис. 2.3.7,б)
При включении схемы а) в роторах сельсинов возникает пульсирующий магнитный поток, а в статорных обмотках обоих сельсинов будет индуктироваться ЭДС, величины которых зависят от положения осей обмоток относительно оси обмотки возбуждения. Если a = b, то в одноименных фазных обмотках будет индуктироваться одинаковые ЭДС, а токи в цепях линии будут отсутствовать.
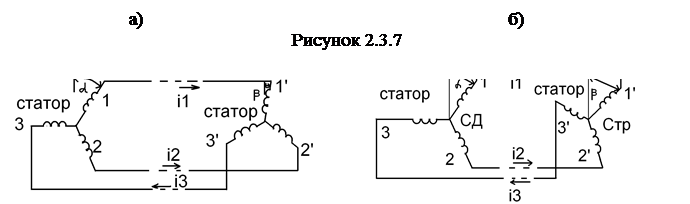 |
Если повернуть ротор сельсин датчика относительно согласованного положения, то изменяется ЭДС в статорных обмотках сельсина – датчика и в линейных цепях статоров возникнут уравнительные токи i1, i2, i3. Взаимодействие этих токов с магнитными потоками роторных обмоток создает на осях СД и СП синхронизирующий момент Мс, который стремится установить ротор СД и СП таким образом, чтобы j = a - b = 0. Если ротор СД закреплен в новом положении, то ротор СП будет следовать за ротором СД, отрабатывая угол рассогласования.
В трансформаторном режиме (рис. б) питание возбуждения подается только на ротор СД. Ротор СТр зафиксирован в одном положении, а ротор СД поворачивается на контролируемый угол. Магнитный поток роторной обмотки СД индуктирует в фазных обмотках его статора ЭДС Е1,Е2 и Е3, которые в свою очередь образуют фазные токи i1, i2, i3. Эти токи создают переменные магнитные потоки, индуктирующие ЭДС в роторной обмотке СТр, а сумма этих ЭДС дает выходное напряжение Uвых ротора СТр, зависящее от угла рассогласования осей роторов СД и СТр.
УСИЛИТЕЛИ И СТАБИЛИЗАТОРЫ
Дата добавления: 2019-02-22; просмотров: 911; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!