Параметрические датчики реактивного сопротивления.
1. Устройство , принцип действия индуктивных датчиков:
А) Индуктивные.
Б) Магнитоупругие.
В) Трансформаторные.
2. Устройство , принцип действия емкостных датчиков.
1. Группу индуктивных датчиков составляют индуктивные, трансформаторные и магнитоупругие датчики
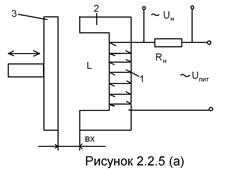 |  | ||
1.А. Принцип действия индуктивных датчиков основан на изменении индуктивности с магнитопроводом при перемещении якоря. Конструкции индуктивных датчиков показаны на рисунке 2.2.5.
Датчик на рисунке 2.2.5,а представляет собой катушку 1 с ферромагнитным сердечником 2 и с подвижным якорем 3. При линейном перемещении якоря воздушный зазор d изменяется, изменяется и интенсивность магнитного потока, а значит и индуктивность L катушки и ее полное сопротивление ZL.
Но тогда
UH = IH × RH = [ Un/( ZL + RH)] × RH = F( d)
Следует отметить, что при уменьшении длины зазора d индуктивность катушки L увеличивается, а это в свою очередь приводит к уменьшению падения напряжения на нагрузке UH.
Достоинства индуктивных датчиков: высокая чувствительность, надежность и долговечность, отсутствие контактных устройств, простота конструкции и эксплуатации. Основным недостатком является нелинейность реальной статической характеристики.
Такие датчики используются для контроля малых линейных перемещений (от 0,001 до 1 мм).
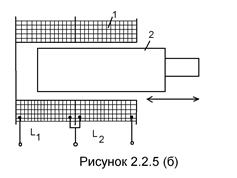
Для контроля больших перемещений (до 50 – 60 мм) используются индуктивные датчики соленоидного типа (рис. 2.2.5,б).
|
|
|
Здесь внутри катушки 1 перемещается подвижный ферромагнитный сердечник 2. Для создания измерительной схемы от средней точки катушки сделан отвод. Когда сердечник находится в центре катушки, то в силу симметрии L1=L2. При перемещении сердечника, например, вправо, индуктивность правой половины катушки L2 увеличивается, а левой L1 уменьшается. По изменению этих индуктивностей можно измерить значение перемещения сердечника.
1.Б. Магнитоупругие датчики (рис. 2.2.6) относятся к группе индуктивных датчиков, так как принцип действия их основан на свойстве ферромагнитных материалов изменять магнитную проницаемость при упругих деформациях, называемых механической нагрузкой.
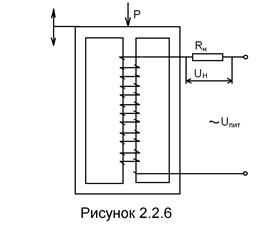 Индуктивность же катушки прямо пропорциональна магнитной проницаемости магнитопровода катушки. Таким образом, получается цепь последовательных преобразований: механическая сила – механическая напряженность – магнитная проницаемость – индуктивность.
Индуктивность же катушки прямо пропорциональна магнитной проницаемости магнитопровода катушки. Таким образом, получается цепь последовательных преобразований: механическая сила – механическая напряженность – магнитная проницаемость – индуктивность.
Для изготовления магнитоупругих датчиков применяются материалы, имеющие явно выраженный магнитоупругий эффект. К таким материалам можно отнести некоторые сорта пермаллоя.
К достоинствам магнитоупругих датчиков можно отнести: высокую чувствительность; малые габариты, массу и простоту конструкции; высокую надежность, так как отсутствуют подвижные части. Основными недостатками являются: нестабильность характеристик, высокая погрешность от температуры и гистерезиса.
|
|
|
Магнитоупругие датчики применяются для измерения больших механических усилий.
1.В. Трансформаторные датчики также относятся к группе индуктивных датчиков, так как имеют на своем выходе взаимоиндуктивность (рис. 2.2.7)
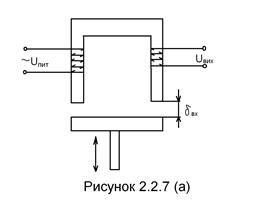 | 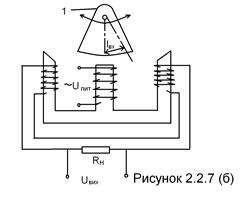 |
На рис. 2.2.7,а показано устройство трансформаторного датчика для измерения линейных перемещений.
Здесь при перемещении подвижного якоря изменяется взаимоиндуктивность и это используется при модулировании изменений выходного напряжения.
На рис. 2.2.7,б показано устройство трансформаторного индуктивного датчика для измерения угловых перемещений. Принцип действия основан на изменении взаимной индуктивности потокосцепления и значения ЭДС в обмотках датчика при угловых перемещениях ферромагнитного сердечника 1 (якоря). При симметричном положении якоря ЭДС в выходных обмотках равны между собой и Uвых = 0. При отклонении якоря от среднего положения будет изменяться выходное напряжение по амплитуде, а фаза будет зависеть от направления перемещения.
|
|
|
Достоинство трансформаторных датчиков в том, что цепи питания и выходная не имеют гальванической связи. Связь между цепями нагрузки и питания только магнитная.
2. Емкостной датчик представляет собой конденсатор, емкость которого изменяется при изменении контролируемой величины. Конструкции емкостных датчиков показаны на рисунке 2.2.8.

Как известно, емкость плоского конденсатора определяется по формуле:
С = 0,088× e×S/d,
где e - относительная диэлектрическая проницаемость среды пФ/см (для воздуха e =1);
S – активная площадь пластины (обкладок) конденсатора, см2;
d – расстояние между пластинами (обкладками), см.
В соответствии с формулой можно построить емкостные датчики, в которых преобразование контролируемой неэлектрической величины будет происходить за счет изменения e, S и d.
На рисунке 2.2.8,а перемещение подвижной пластины 2 относительно неподвижной 1 изменяет d, что приводит к изменению емкости плоского конденсатора.
На рисунке 2.2.8,б неподвижная пластина 1 и подвижная пластина 2 закреплены на общей оси. Поворачивая подвижную пластину на угол j, мы изменяем активную площадь S (на рисунке заштрихована), что также приводит к изменению емкости.
|
|
|
На рисунке 2.2.8,в показан емкостной датчик, у которого изменяется относительная диэлектрическая проницаемость среды e, а параметры S и d остаются неизменными.
Генераторные датчики
1. Термоэлектрические датчики.
2. Пьезоэлектрические датчики.
3. Фотоэлектрические датчики.
4. Индукционные датчики.
А) Тахогенераторы;
Б) Сельсинные преобразователи;
В) Вращающиеся трансформаторы.
Литература:
 1. Термоэлектрические датчики (термоэлектрические преобразователи) предназначены для измерения температуры.
1. Термоэлектрические датчики (термоэлектрические преобразователи) предназначены для измерения температуры.
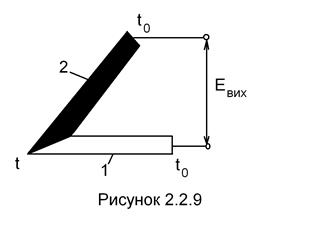
Он состоит из двух электродов 1 и 2, изготовленных из разнородных проводников (рис. 2.2.9). Одни концы проводников соединены между собой методом спайки, скрутки или сварки – получается рабочий конец (спай) элемента. Вторые концы свободные (их еще называют холодными) и к ним подключают измерительный прибор.
Если температура t рабочего спая отличается от температуры tо холодных концов, то в элементе возникают две термо-ЭДС, возникновение которых объясняется диффузией свободных электронов из металла, где их больше, в металл где их меньше (контактная термо-ЭДС или термо-ЭДС Зеебека), а также в каждом проводнике возникает термо-ЭДС Томсона за счет увеличения числа свободных электронов в нагретом конце, которые диффундируют к холодному.
Ерез(t,tо) = Ез(t) + Ет(t,tо) 
Отсутствие внешнего источника питания позволяет считать такой чувствительный элемент генераторным.
На практике чаще всего используются следующие сочетания:
ТХК – хромель-копель (до 600оС),
ТХА – хромель-алюмель (до 1000оС),
ТПП – платина-платинородий (до 1300оС),
ТВМ- вольфрам-молибден (до 2100оС).
ТермоЭДС достигает 50мВ.
2. Пьезоэлектрические датчики работают за счет электрических зарядов, которые появляются на поверхности кристаллов при их сжатии (рис. 2.2.10).
 На практике чаще всего этот датчик изготавливают из кварцевой пластины 1, на поверхность которой напылением (или наклеиванием токопроводящим клеем) наносятся электроды 2, к которым подпаиваются выводы 3. при сжатии пластины силой F вследствие прямого пьезоэлектрического эффекта появляется
На практике чаще всего этот датчик изготавливают из кварцевой пластины 1, на поверхность которой напылением (или наклеиванием токопроводящим клеем) наносятся электроды 2, к которым подпаиваются выводы 3. при сжатии пластины силой F вследствие прямого пьезоэлектрического эффекта появляется
Uвых = Q/Сд = К× F/Сд,
где Q – величина заряда, К – коэффициент пропорциональности, Сд – емкость датчика.
Этот датчик безынерционный и выходное напряжение для разных датчиков может быть от единицы милливольт до единиц вольт.
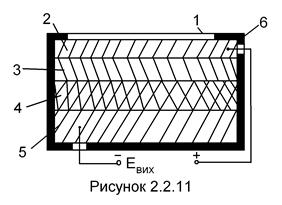 3. Фотоэлектрические датчики генераторного типа широко используются в схемах автоматики. На рисунке 2.2.11 показано устройство вентильного фотодатчика с внутренним фотоэффектом.
3. Фотоэлектрические датчики генераторного типа широко используются в схемах автоматики. На рисунке 2.2.11 показано устройство вентильного фотодатчика с внутренним фотоэффектом.
Световой поток через слой прозрачного лака 1 попадает на золотую пластину 2. Под воздействием энергии светового потока в золотой пластине образуются свободные электроны, которые через запорный слой 3 попадают в селеновый полупроводник 4. Запорный слой обладает вентильным свойством – пропускает электроны только в одном направлении – вниз. Таким образом, золотая пластина, теряя свободные электроны, получает положительный потенциал, а железная подкладка 5 – отрицательный. Разность потенциалов возникает без использования дополнительной энергии, т.е. такой фотодатчик освещенности является генераторным.
4 Генераторные индукционные датчики – это маломощные электрические машины, вырабатывающие напряжение, пропорциональное угловой скорости или углу поворота вала. К ним относятся тахогенераторы, сельсины и вращающиеся трансформаторы.
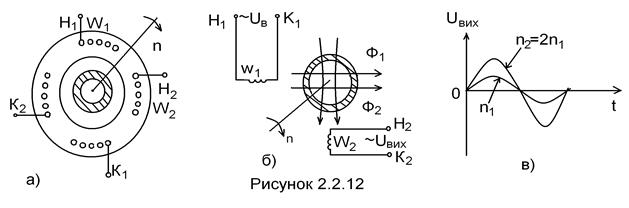
А. Тахогенераторы применяются четырех типов – постоянного тока с возбуждением от постоянных магнитов и независимым возбуждением (электромагнитом) и переменного тока синхронные и асинхронные. Рассмотрим асинхронный тахогенератор, который наиболее широко применяются на практике. Конструктивно такой тахогенератор представляет собой асинхронный двухфазный двигатель с полым ротором (рис. 2.2.12). Для получения постоянного напряжения к выходной обмотке подключают выпрямитель.
Две обмотки статора сдвинуты на 90о (рис. 2.2.12,а) и к одной из них подводится постоянное по амплитуде и частоте напряжение возбуждения (рис. 2.2.12,б), создающее магнитный поток Ф1. При неподвижном роторе этот поток не оказывает никакого влияния на вторую обмотку, так как перпендикулярен её оси.
Когда ротор вращается, то его стенки пересекают поток Ф1 и в них появляются токи создающие магнитный поток Ф2, уже направленный по магнитной оси второй катушки. Так как
Ф2 = К1× Iрот =К2×Ф1× n = K3× n× U в = K4× n, то
Uвых =4¸44× K5× f с×W2×Ф2 = К×n
где К5 = Кf×Кw – коэффициент равный произведению коэффициента формы (для синусоидального тока Кf = 1,11), Кw – обмоточный коэффициент статорной обмотки;
f с – частота питающего напряжения, Гц;
W2 – число витков статорной обмотки.
Т.е. индуцированное во второй обмотке выходное напряжение прямо пропорционально скорости вращения ротора (рис. 2.2.12,в).
Б. Сельсин представляет собой маломощную машину, по конструкции и схеме похожую на трехфазный синхронный генератор (рис. 2.2.13)
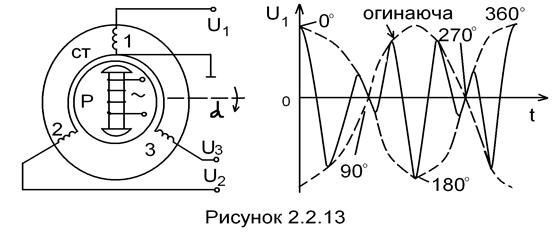 |
Статор сельсина СТ снабжен пазами, в которые укладывается трехфазная обмотка, фазы которой смещены на 120о. Обмотка статора соединяется в звезду (как на рисунке) или треугольником. Ротор сельсина обычно имеет явно выраженные полюсы, на которые накладывается однофазная обмотка возбуждения. Напряжение возбуждения подводится к ротору через контактные кольца и щетки.
Работает сельсин следующим образом. Ток обмотки возбуждения ротора создает переменный магнитный поток, который пронизывает обмотки статора, индуктируя в них ЭДС, частота которой равна частоте возбуждающего напряжения. Величина же этой ЭДС будет зависеть от взаимного расположения осей статорных обмоток и ротора. Если они совпадают, то ЭДС – максимальна, если они взаимно перпендикулярны, то ЭДС равна нулю. Если же ротор повернули на 180о, то ЭДС вновь максимальна, но знак её меняется на противоположный.
Таким образом, сельсин является датчиком угла поворота.
В. Вращающийся трансформатор (ВТ) по принципу действия не отличается от сельсина (рис. 2.2.14).
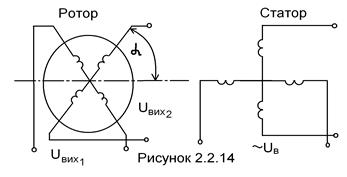 На статоре и роторе ВТ расположены по две обмотки, сдвинутые в пространстве под углом 90о. Одна из обмоток статора является обмоткой возбуждения и питается от однофазной сети переменного тока. Напряжения с ротора снимается с помощью контактных колец и щеток.
На статоре и роторе ВТ расположены по две обмотки, сдвинутые в пространстве под углом 90о. Одна из обмоток статора является обмоткой возбуждения и питается от однофазной сети переменного тока. Напряжения с ротора снимается с помощью контактных колец и щеток.
ВТ в зависимости от схемы включения обмоток статора и ротора вырабатывает напряжения либо пропорциональные углу поворота, как и сельсин, либо пропорциональны синусу и косинусу угла поворота ротора:
Uвых1 = K×Uв ×sina; Uвых2 = K×Uв×cosa,
что позволяет использовать ВТ не только как датчик угловых величин, но и как функциональный элемент для вычислительной техники.
Дата добавления: 2019-02-22; просмотров: 617; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!