Послідовність етапів вибору системи автоматизації ТОК
1. Визначитись з критерієм, на основі якого буде побудована система автоматизації ТОК.
2. До якого виду об’єкту відноситься об’єкт, що вивчається ?
3. Провести аналіз ТОК і вибрати основні параметри об’єкту.
4. Визначитись, які вихідні параметри контролюються, які регулюються, якими керують з урахуванням особливостей ТОК.
5. Визначити допустимі значення відхилень регульованих параметрів від номінальних даних.
6. Визначити параметри керування, за допомогою яких регулюють вихідні параметри.
7. Визначити основні характеристики ТОК по каналах регулювання.
На першому етапі визначаються із критерієм оцінки, на основі якого буде побудована система автоматизації ТОК. Такими критеріями є технологічні і економічні критерії, наприклад: збільшення продуктивності праці на об’єкті, поліпшення якості продукції, зменшення втрат сировини, зменшення енерговитрат, збільшення випуску продукції та ін.
Далі визначаються з типом об’єкту керування і в першу чергу, періодичний він чи безперервний. Якщо об’єкт періодичної дії, то для подальшого створення системи автоматизації необхідно побудувати циклограму об’єкту. Для таких об’єктів критерієм оцінки його роботи може бути мінімізація часу виконання основної операції процесу, при накладенні обмежень на технологічні параметри.
Аналізуючи ТОК слід визначитись, які параметри відносяться до вхідних, до вихідних, до параметрів керування і неконтрольованих збурень. Збуреннями, що будуть діяти на систему автоматизації, будуть вхідні параметри і неконтрольовані збурення, наприклад погода у навколишньому середовищі. Серед вихідних параметрів знаходяться параметри, які будуть керованими. Параметри керування це ті параметри за рахунок яких будуть підтримуватись в належному стані керовані параметри.
|
|
|
Серед вихідних параметрів необхідно вибрати ті параметри які будуть тільки контролюватись, які будуть регулюватись, і, якими будуть керувати в залежності від особливостей технологічного обладнання або технологічного регламенту процесу. На регульовані параметри визначаються допустимі значення відхилень від номінальних або технологічних значень цих параметрів. При перевищенні цих відхилень в роботу буде включатись система їх регулювання.
При виборі параметрів керування певних параметрів ТОК слід орієнтуватись на максимальний вплив того чи іншого параметра на регульований вихідний параметр. Коли параметри керування підібрано, бажано за допомогою математичного моделювання, вивчення енергетичних і матеріальних балансів ТОК у динамічному режимі, визначитися із характеристиками об’єкту по каналах керування: постійною часу об’єкту, запізненням та ін.
|
|
|
Контрольні запитання
1. Що розуміють під типовим процесом об’єкту або виробництва ?
2. Що являється особливістю технологічних об’єктів керування для сільськогосподарських виробництв ?
3. Що розуміють під поняттям технологічного об’єкту керування?
4. Які вимоги до технологічного об’єкту керування ?
5. Вкажіть послідовність етапів виконання типової схеми технологічного виробництва ?
6. Вимоги до тепло і енергозбереження на сучасних сільськогосподарських ТОК?
7. Чим відрізняються статичні і динамічні характеристики ТОК?
8. Якими рівняннями описуються передатні функції об’єктів керування ?
9. Вкажіть як об’єкти керування відрізняються за характером часового режиму функціонування ?
10. Чим відрізняються об’єкти керування із зосередженими і розподіленими параметрами ?
11. Наведіть приклади основних і допоміжних об’єктів керування ?
12. Що таке інформаційна ємність об’єкту керування ?
13. Вкажіть на типи технологічних процесів ТОК ?
14. Який алгоритм етапів вибору системи автоматизації ТОК ?
15. Які особливості автоматизації сільськогосподарського виробництва?
|
|
|
16. Назвіть типові технічні рішення при автоматизації технологічних процесів.
Електроприводи як об’єкти Керування на підприємствах АПК
Структурна схема електричного приводу
Сільськогосподарське виробництво використовує різноманітні машини, агрегати та потокові лінії. Виконавчі органи цих агрегатів і машин безпосередньо виконують технологічні операції, пов’язані з затратою механічної енергії, яку надають електричні приводи.
Електричним приводомназивається електромеханічна система, яка складається з електрорушійного, перетворювального, передавального і керуючого пристроїв, призначеного для приведення в рух виконавчих органів робочої машини і керування цим рухом. Для виконання цих функцій електропривод виробляє механічну енергію за рахунок електричної енергії, який отримує від джерела електричної енергії (мережі електропостачання). Вироблена електроприводом механічна енергія передається різним виконавчим органам робочих машин і механізмів (стрічці транспортера, змішувачу кормів, дробарці, вентиляторному пристрою та ін.) і при необхідності регулюється відповідно з технологічними вимогами до режимів роботи виконавчого органу.
|
|
|
Рис. 2.1. Структурна схема електричного електроприводу
Структурна схема автоматизованого електроприводу показана на рис.2.1. Основою любого електроприводу є електродвигун ЕД, який забезпечує перетворення електричної енергії в механічну. Для узгодження руху електродвигуна з виконавчим органом ВО використовується механічний передавальний пристрій МП, який забезпечує зміну параметрів виробленої електродвигуном механічної енергії. Інколи електродвигун приєднується до ВО без МП. Рушійна сила ЕД (ротор), МП і ВО утворюють механічну частину електроприводу. Електрична енергія підводиться до ЕД від джерела електричної енергії ДЕ через електричний перетворювальний пристрій ЕП.. ЕП призначений для перетворення і регулювання параметрів електричної енергії, яка надходить з ДЕ до ЕД для керування механічним рухом ВО.
Керування процесом перетворення енергії виконується за допомогою пристрою керування ПК, який виробляє сигнал керування Uк через заданий сигнал Uз і інші додаткові сигнали про реальні параметри механічного руху, процес перетворення енергії та ін. Перетворювальний і керуючий пристрої утворюють систему керування, яка разом із обмотками складає електричну частину електроприводу.
Електроприводи бувають дуже різні і їх класифікація залежить від багатьох факторів: виду руху у пристрої, кількості електродвигунів і взаємозв’язків між ними, виду механічного передавального пристрою, виду перетворювального пристрою, наявності системи регулювання і рівня автоматизації, роду струму та ін.
Механічний рух елементів електроприводу описується за допомогою законів електромеханіки. За другим законом Ньютона рух тіла, який обертається навколо нерухомої осі для обертального моменту електродвигуна визначається рівнянням:
 , (2.1)
, (2.1)
де М – обертальний момент електродвигуна, Н×м; Мс – момент опору, який створює виконавчий орган – механічна характеристика машини, Н×м; J – приведений момент інерції системи, кг×м2; w - кутова швидкість обертання двигуна, рад/с; t – час, с.
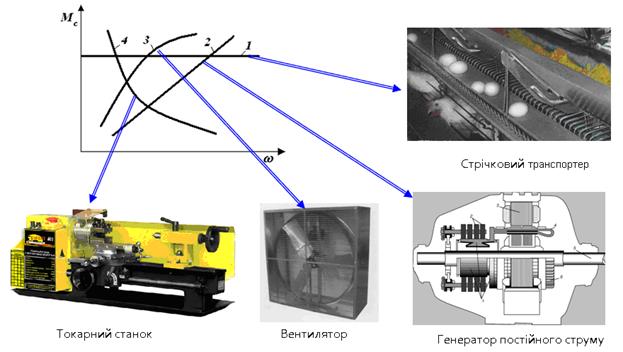
Рис. 2.2. Механічні характеристики і зовнішній вигляд робочих машин
Механічні характеристики робочих машин можна поділити на чотири групи.
До першої групи відносяться машини, де механічна характеристика не залежить від швидкості, Мс = const, (рис. 2.2, пряма 1). До таких робочих машин відносяться підйомні крани, стрічкові конвеєри, поршневі насоси та ін.
В механізмах другої групи механічна характеристика зростає пропорційно зростанню швидкості обертання двигуна, Мс = kw (рис. 2.2, пряма 2). Таку механічну характеристику має генератор постійного струму з незалежним збудженням.
Параболічну механічну характеристику мають механізми третього виду, де Мс = kw2 , (рис. 2.2, крива 3). Таку характеристику мають робочі машини, які працюють за відцентровим принципом: вентилятори, відцентрові насоси, тощо.
В робочих машинах четвертого виду момент опору обернено пропорційний швидкості, а потужність споживання лишається сталою, Мс = k/w, (рис. 2.2, крива 4). Такі механічні характеристики мають деякі токарні, розточувальні та фрезерні верстати.
Дата добавления: 2019-02-13; просмотров: 249; Мы поможем в написании вашей работы! |

Мы поможем в написании ваших работ!